- The paper presents a modular framework integrating 3D OctoMap, laser, and RGB-D sensors to achieve robust indoor navigation.
- The novel variable step size RRT optimizes path planning by dynamically adapting to uneven terrains and obstacles.
- Experimental validation in simulations and real-world trials demonstrates the system's reliable performance on slopes and stairs.
Autonomous Mobile Robot Navigation in Uneven and Unstructured Indoor Environments
Introduction
The paper "Autonomous Mobile Robot Navigation in Uneven and Unstructured Indoor Environments" (1710.10523) discusses the challenges and solutions in robotic navigation within environments shared with humans. It presents an approach that utilizes a modular software and hardware framework to tackle the problem of autonomous navigation in indoor settings, specifically addressing the complexities posed by uneven terrain such as slopes and staircases. This research aims to advance robots' ability to operate safely and efficiently in these challenging environments, where traditional navigation systems may struggle.
System Architecture
The proposed system is built around a detailed architecture that integrates perception, mapping, and navigation components. A key aspect of this architecture is the use of 3D mapping through OctoMap, which generates a probabilistic representation of the environment. This framework incorporates wheel odometry, a 2D laser scanner, and RGB-D data to produce a versatile and robust environmental model.
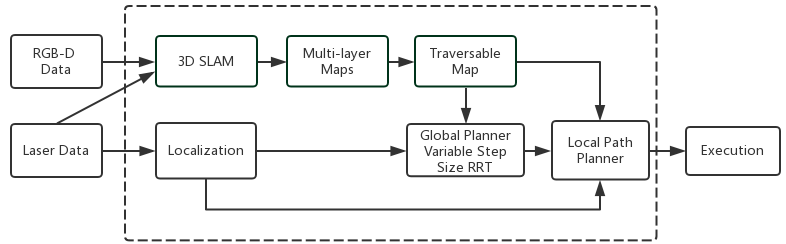
Figure 1: High-level system architecture.
Environment Representation
The paper emphasizes the importance of accurate environment representation for effective autonomous navigation. By reconstructing the environment in 3D using OctoMap, the system is capable of reflecting both free and occupied spaces, which is pivotal for traversing uneven landscapes. The OctoMap is then projected into 2D multilayer maps, from which the traversable map is generated. This map differentiates slopes from obstacles, allowing the robot to navigate efficiently while avoiding static and dynamic hazards.
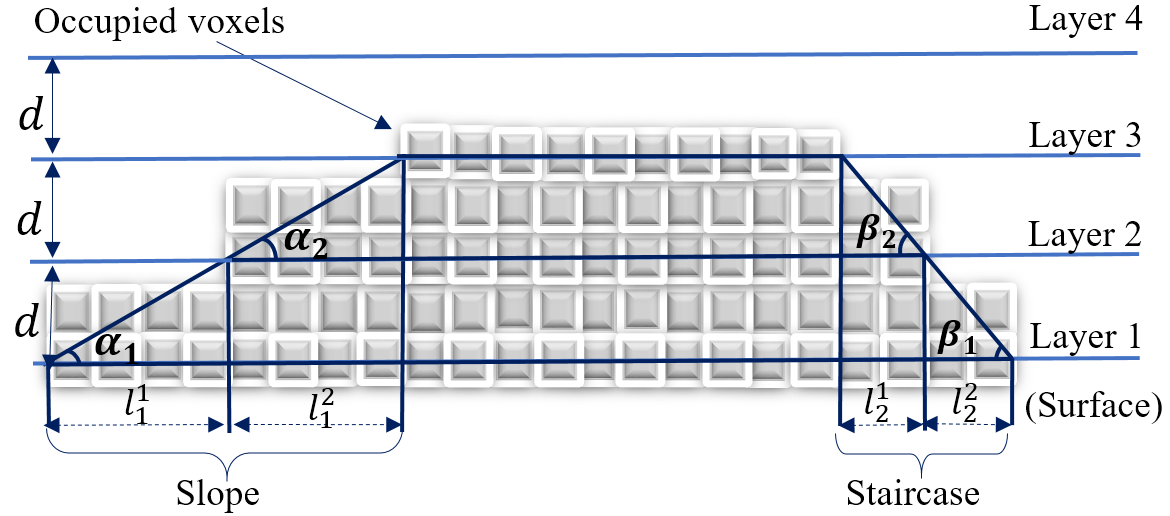
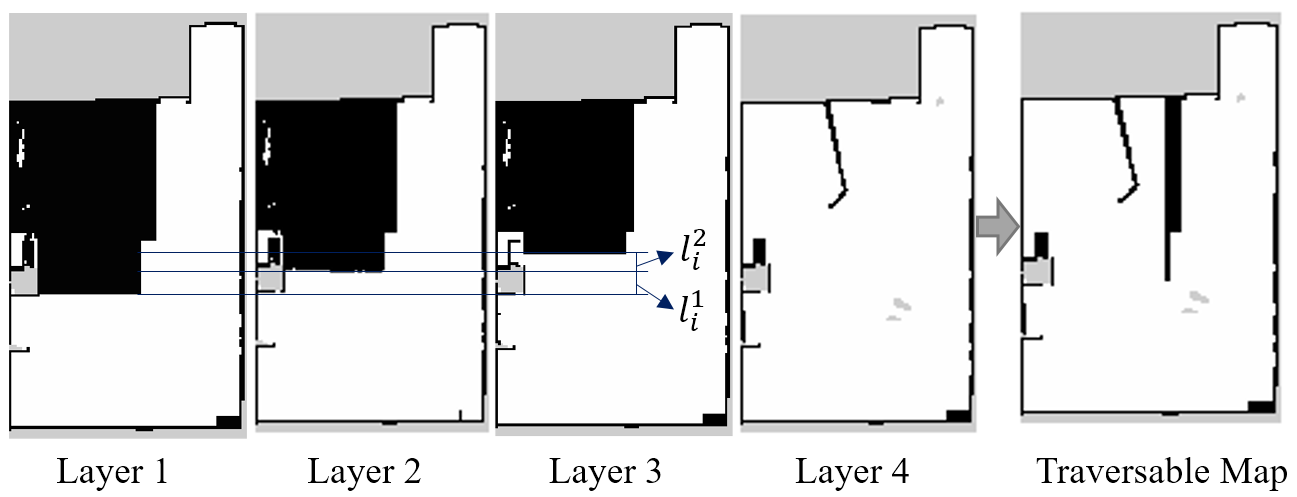
Figure 2: Generation of traversable map from multilayer maps for the Gazebo Caffe environment.
Path Planning and Optimization
In addressing path planning, the paper introduces a variable step size RRT approach. This method dynamically adjusts the step size based on environmental constraints, enhancing its adaptability and efficiency. The RRT-based planning process forms the backbone of global navigation, offering a pathway from the start to the goal that accommodates the robot's mechanical constraints and environmental unpredictability.
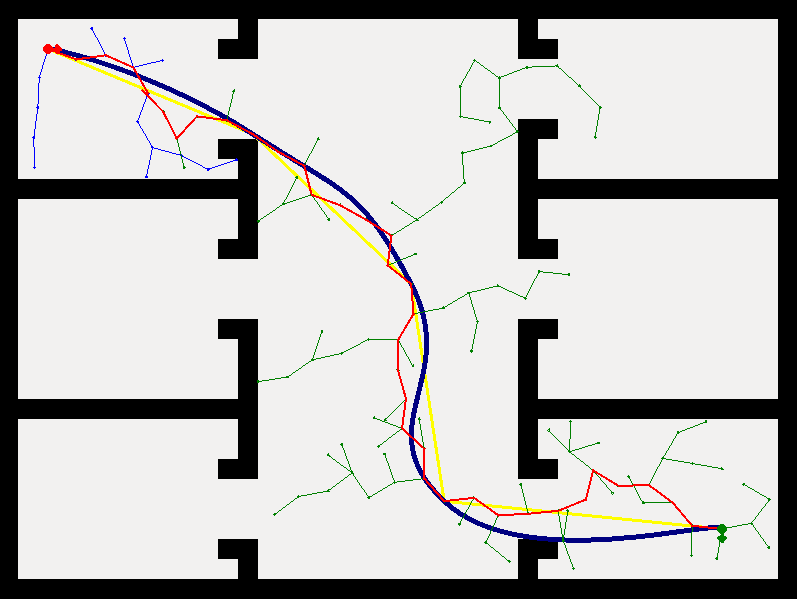
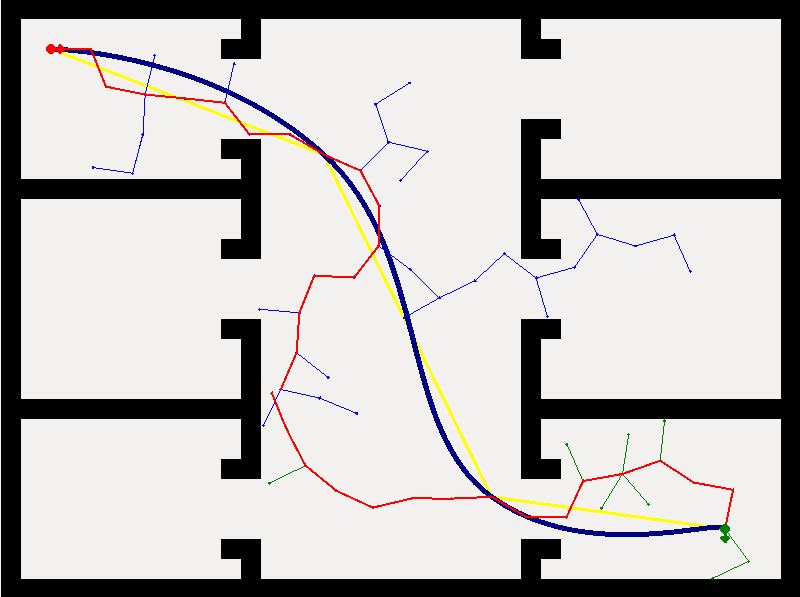
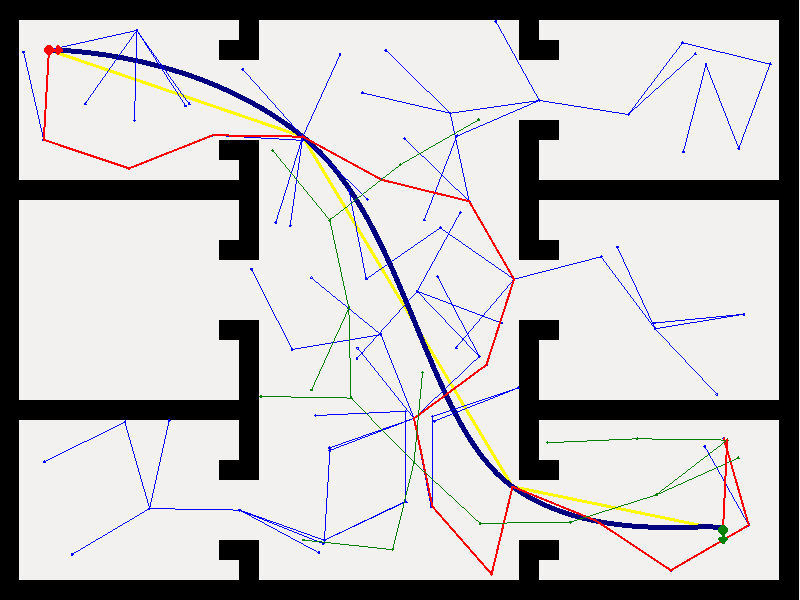
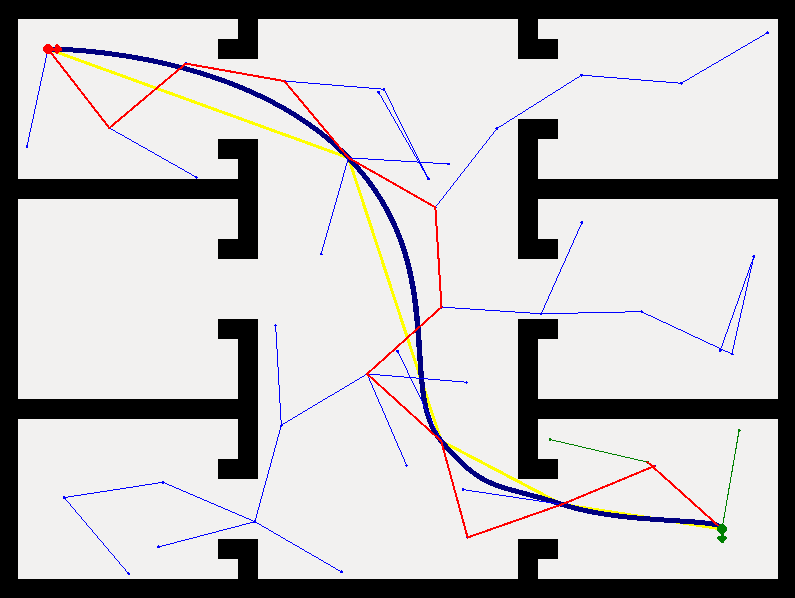
Figure 3: Comparison between RRT and our method. (d) our proposed variant step size RRT.
Experimental Validation
The system's efficacy is validated through extensive simulations and real-world experiments. In simulated environments, the integrated framework demonstrated precision in generating 3D maps and navigating complex spaces. Real-world trials further underscored its robustness, showcasing successful navigation up slopes, and effective avoidance of dynamic obstacles such as moving humans.


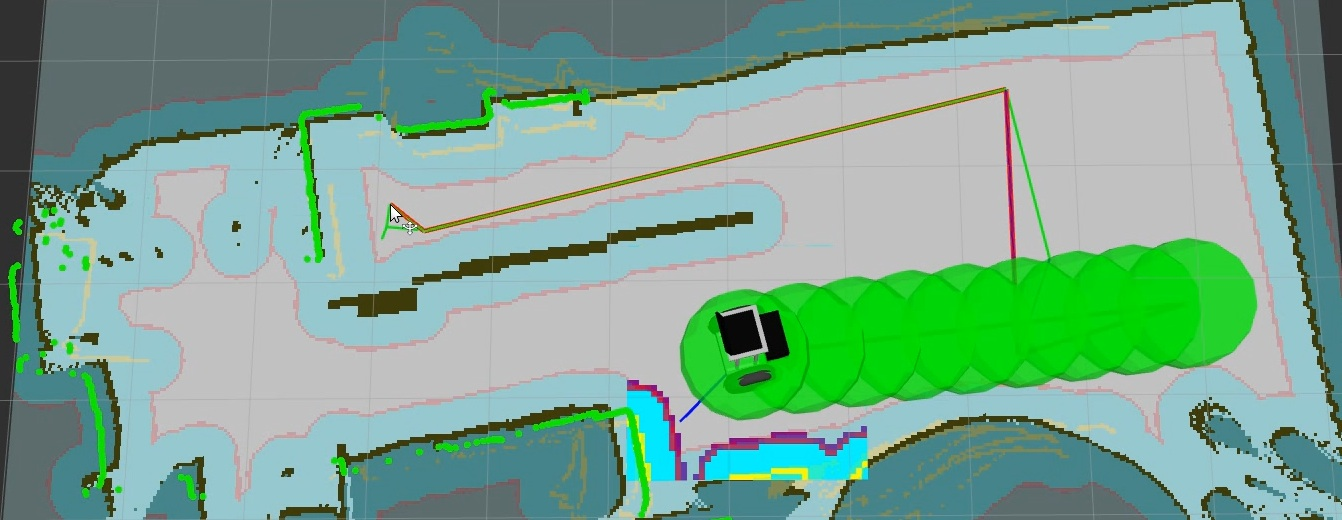


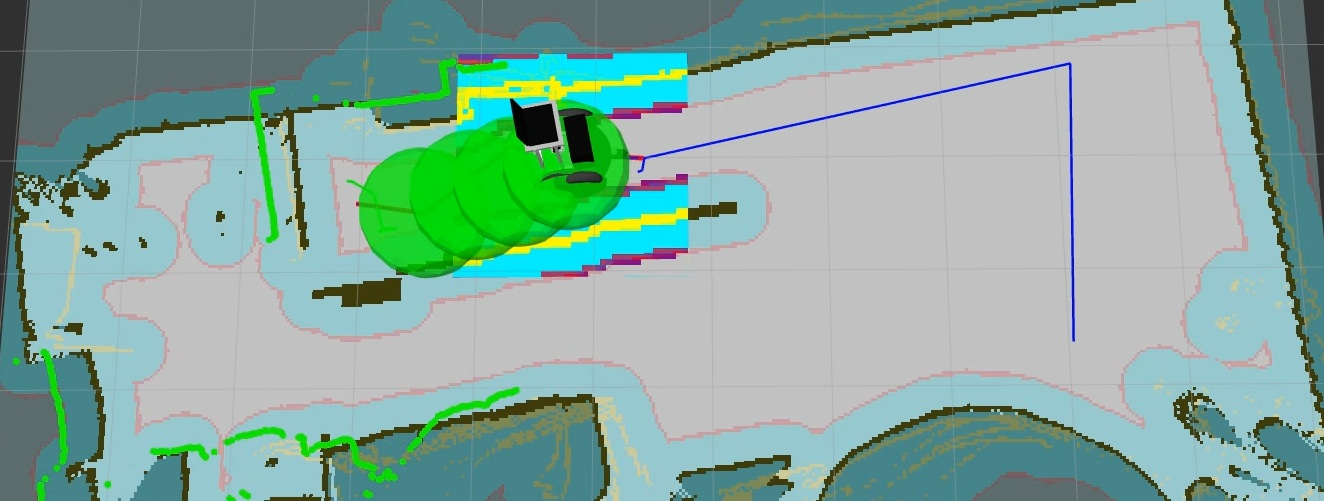
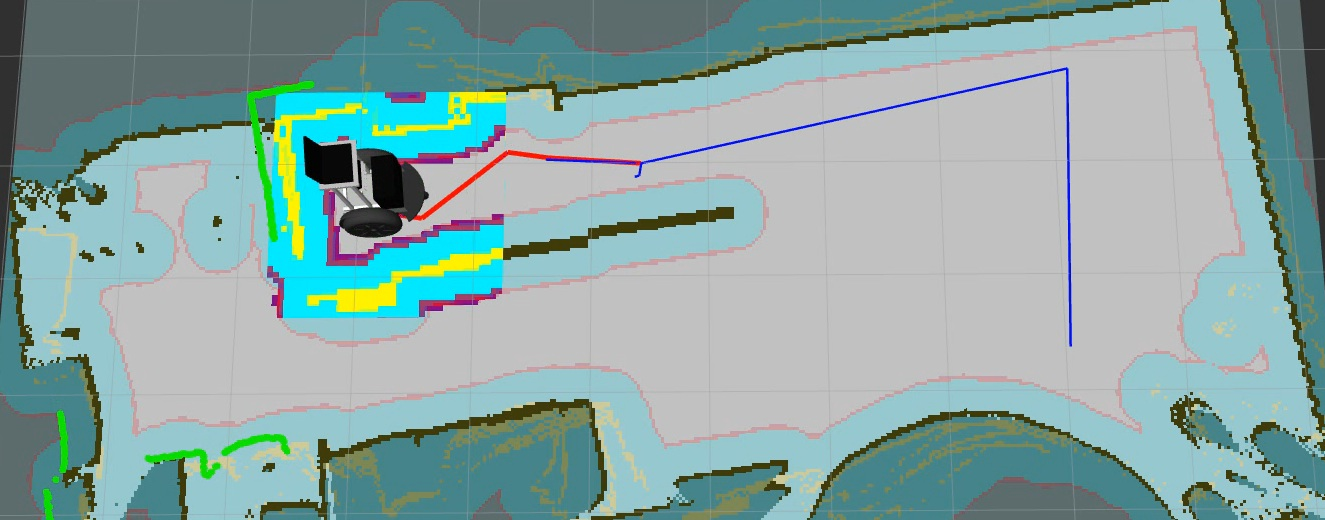
Figure 4: Robot autonomous navigation example in real environment.
Implications and Future Directions
This research has significant implications for the practical deployment of autonomous robots in environments shared with humans. By enhancing navigation systems to effectively cope with indoor uneven terrains, it supports broader applications, including smart wheelchairs and assistive robots. Future developments are poised to integrate advanced global localization and semantic scene parsing, expanding the contextual understanding and operational domains of these systems.
Conclusion
In summary, the paper presents a comprehensive system for autonomous navigation in challenging indoor environments, demonstrating significant progress in robotic mobility. The successful integration of a 3D mapping and adaptable planning components forms a robust foundation for potential developments in autonomous robot systems designed for human environments. These advancements promise to enhance safety, efficiency, and autonomy in operational robotics.