- The paper presents a novel data-dependent method for model order selection in stochastic switched linear systems using Hankel matrix estimation and balanced truncation.
- It employs subspace-based algorithms and singular value decomposition to achieve lower-order approximations with error bounds that converge at the rate of O(N_S^(-Δ_s)).
- The framework balances model complexity with available data, offering strong theoretical guarantees for reliable parameter estimation in control theory and robotics applications.
Data Driven Estimation of Stochastic Switched Linear Systems of Unknown Order
Introduction
The paper "Data Driven Estimation of Stochastic Switched Linear Systems of Unknown Order" presents an approach to identifying the parameters of mean-square stable switched linear systems (SLS) from noisy input-output data when the system order is unknown. This process is essential in control theory, time series analysis, and robotics, among other areas. The methodology focuses on deriving a lower-order approximation of the underlying model, exploiting subspace-based algorithms from system theory.
System Model and Estimation
Switched linear systems are defined by dynamics where at each time step, a discrete switch selects one among multiple linear systems. The challenge arises in estimating the parameters {C,{Ai,pi}i=1s,B} of such systems, requiring the construction of Hankel-like matrices from finite noisy data using ordinary least squares (OLS). This method circumvents non-convexities typically associated with system identification.
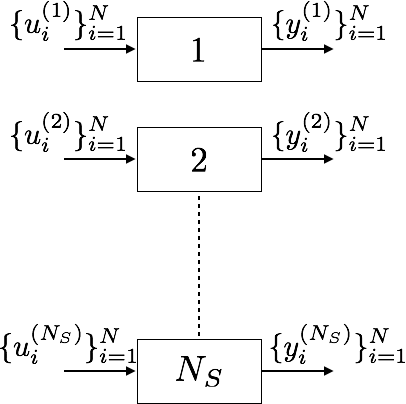
Figure 1: Illustration of the overall system setup for data collection.
A key innovation of this work is the model order selection based purely on data-dependent quantities, allowing for the construction of estimations that are robust as the data size increases. The paper's methodology includes determining these lower-order approximations through singular value decomposition (SVD) and balanced truncation.
Finite Sample Analysis
The paper provides comprehensive sample complexity guarantees for the identification of SLS when the underlying system order is unknown. The Hankel matrix estimation approach ensures that errors decrease as more data is collected:
- Model Selection: A data-dependent rule determines the Hankel matrix's size by balancing truncation and estimation errors.
- Error Bounds: The estimation error between the finite-time estimator and the true Hankel matrix is bounded, demonstrating convergence as the sample size, NS, increases. Specifically, the paper shows that the error decays at a rate of O(NS−Δs), where Δs relates to the system's stability characteristics.
Parameter Estimation
Using the finite-time estimator, the paper develops a balanced truncation procedure to derive low-order approximations of the system parameters Ai,pi. Parameter estimates are evaluated via SVD of the Hankel matrix. A significant finding is the subspace recovery result, demonstrating that the parameter estimates align closely with a balanced truncated realization with high probability. The proximity between estimates and true parameters is governed by the singular values of the Hankel matrix.
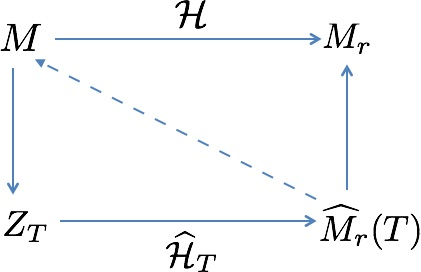
Figure 2: The data collection and estimation process illustrating the role of observations T=N×NS.
Theoretical Implications and Extensions
The approach extends classical results by addressing the switched nature of the systems and the unknown order, a scenario less explored in existing literature. This method can potentially generalize to more complex switch dynamics, such as state-dependent transitions, and hybrid systems. Moreover, the techniques could inform reinforcement learning applications, where nonparametric estimations of dynamic systems are critically needed.
Conclusion
This paper outlines a robust data-driven framework for estimating the parameters of stochastic switched linear systems with unknown order. It balances the trade-offs between model complexity and the available data, offering a practical approach with strong theoretical grounding. The results contribute significantly to the identification and control of complex dynamic systems, opening avenues for more intricate applications in AI and control systems.