- The paper establishes that APFs can be represented as a special case of CBFs, highlighting CBFs’ optimality and enhanced safety in nonlinear systems.
- Simulation results on a quadrotor demonstrate that CBFs provide smoother trajectories and reduced oscillatory behavior compared to APFs.
- Hardware experiments confirm that CBFs outperform APFs by maintaining robust navigation under environmental uncertainty and sensor noise.
Comparative Analysis of Control Barrier Functions and Artificial Potential Fields for Obstacle Avoidance
This paper presents an analysis comparing Control Barrier Functions (CBFs) and Artificial Potential Fields (APFs) in obstacle avoidance for robotic applications. The discussion centers on the theoretical foundation, simulation results, and hardware implementations involving a quadrotor system.
Theoretical Foundations
APFs have been a long-standing method for real-time obstacle avoidance in mobile robots. Their simplicity and model-independent nature make them appealing in various applications. Conversely, CBFs are more recent and offer a method to ensure safety for nonlinear systems by acting as a filter on a nominal controller. The paper establishes that APFs can be viewed as a special case of CBFs, where a given APF can be transformed into a CBF. This translation reveals beneficial properties when applied to nonlinear systems.
To demonstrate the generality of CBFs over APFs, the paper outlines how APFs can be represented within the CBF framework, providing additional favorable characteristics such as pointwise optimality in balancing goal attainment and avoidance, and applicability to nonlinear dynamics. The synthetization from APF to CBF highlights how CBFs can provide smoother behavior and improve safety compliance compared to traditional APFs.
Simulation and Practical Implications
Simulation results on a quadrotor system illustrate the performance benefits of CBFs over APFs. The study conducted several scenarios, highlighting the differences in obstacle avoidance between the methods. The scenarios included simple paths with single obstacles and more complex environments with multiple obstacles.
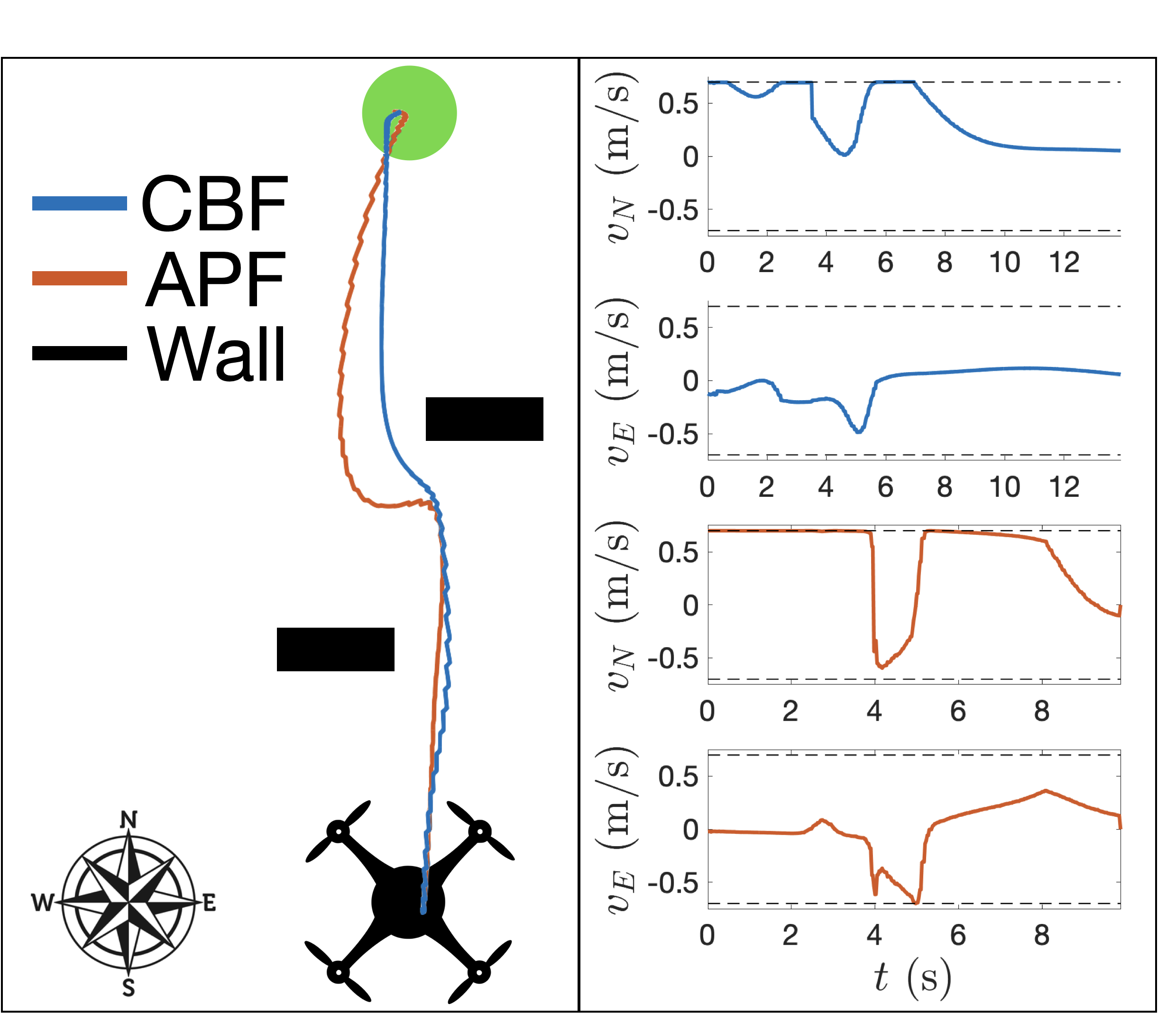
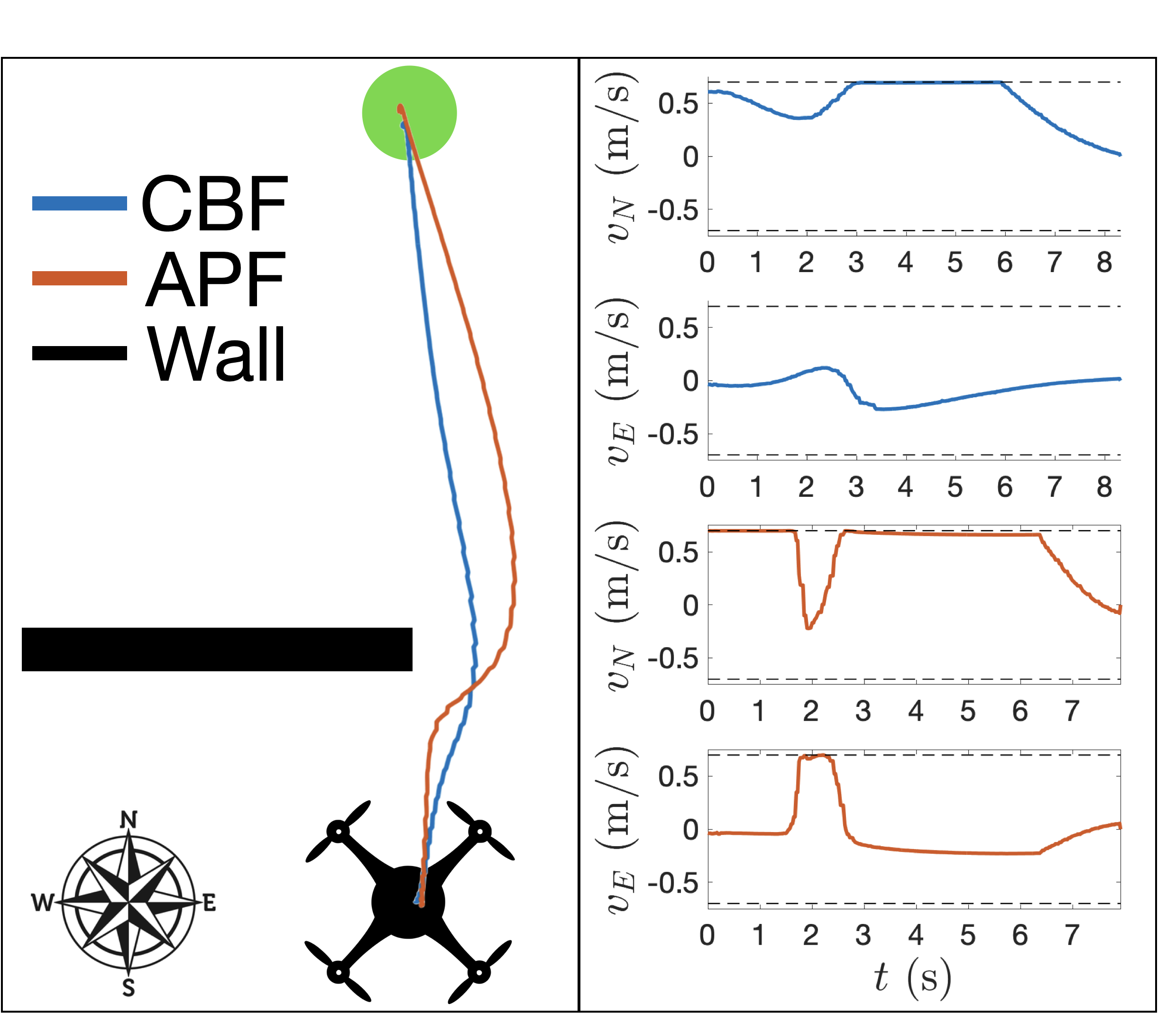
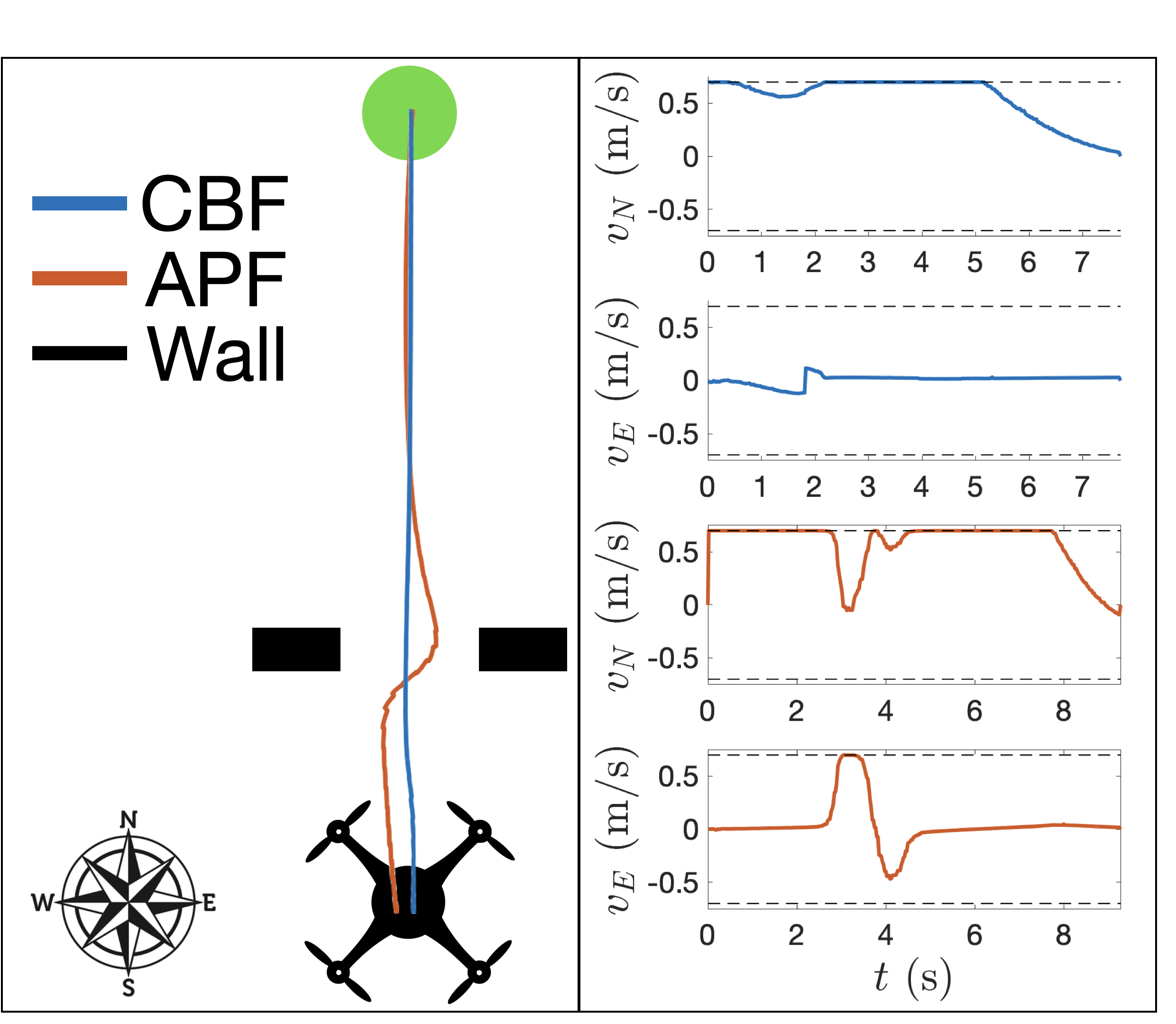
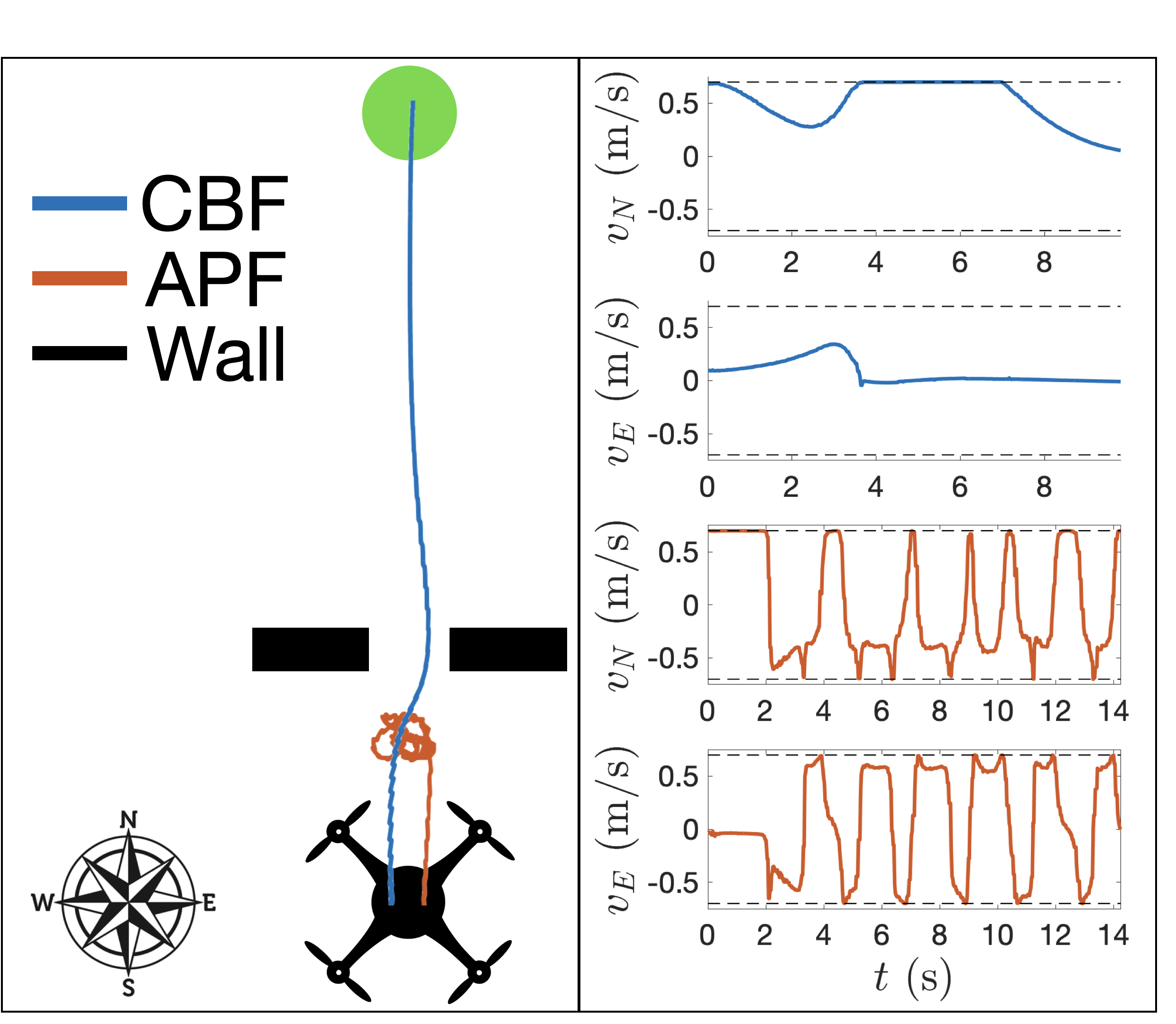
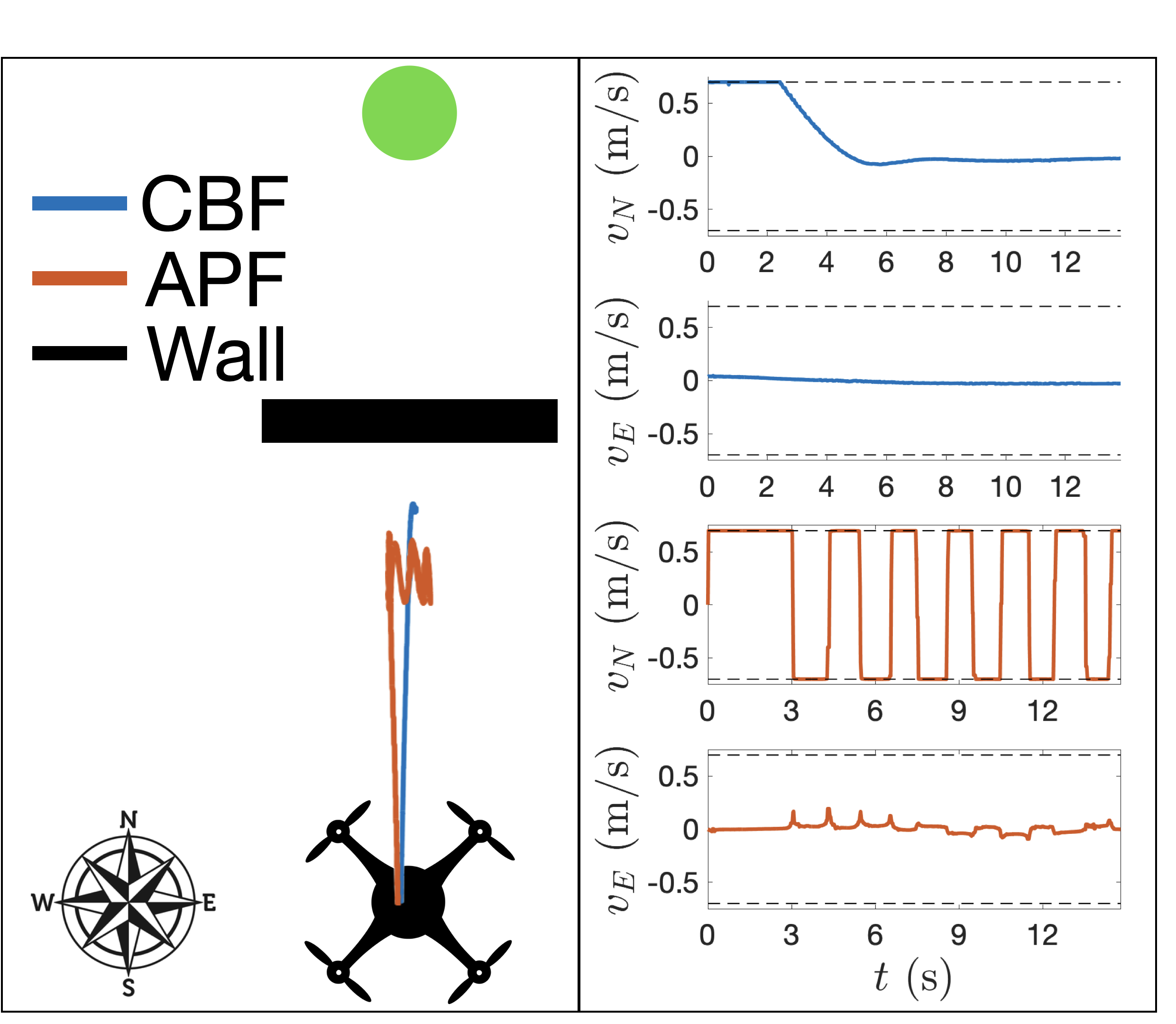
Figure 1: Simulation results for the quadrotor with APFs and CBFs across various scenarios.
In comparing both methods, the simulation using CBFs consistently showed reduced oscillatory behavior and more efficient navigation near obstacles. This lack of oscillation is particularly advantageous, as APFs often require extensive tuning to mitigate undesirable oscillations.
Hardware Experiments
The paper extends its findings with hardware implementations on a quadrotor. The configuration uses onboard sensing to localize and perform obstacle avoidance, representing a realistic setup capable of autonomous operation.
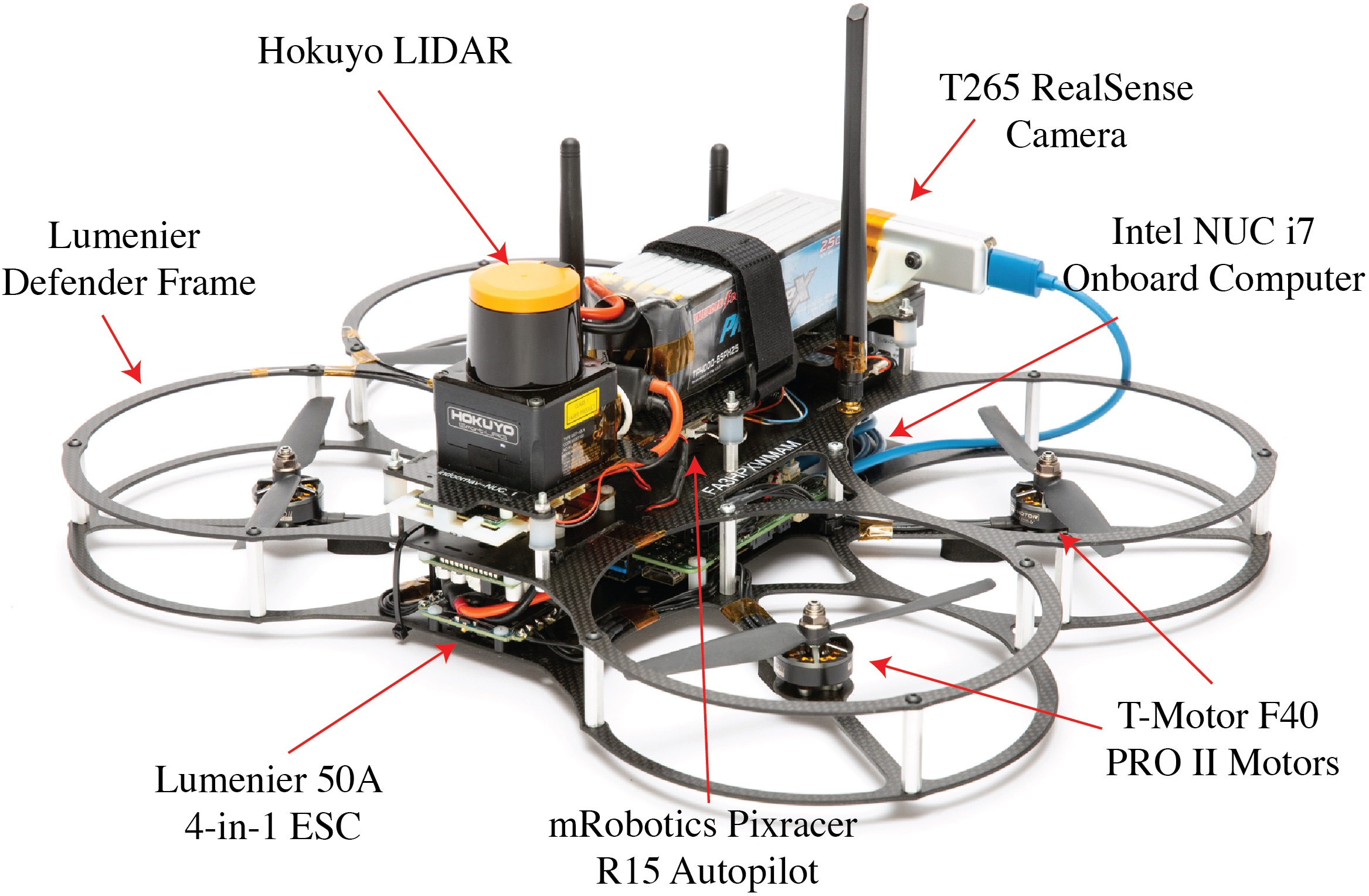
Figure 2: The quadrotor used in the experiments.
In real-world testing, CBFs continued to outperform APFs, especially in terms of robustness to environmental uncertainty and sensor noise. While APFs showed increased oscillatory behavior in the hardware tests compared to simulations, CBFs maintained stable navigation. This performance is attributed to the inherent optimality and adaptability of CBFs, eliminating the need for extensive tuning observed with potential fields.
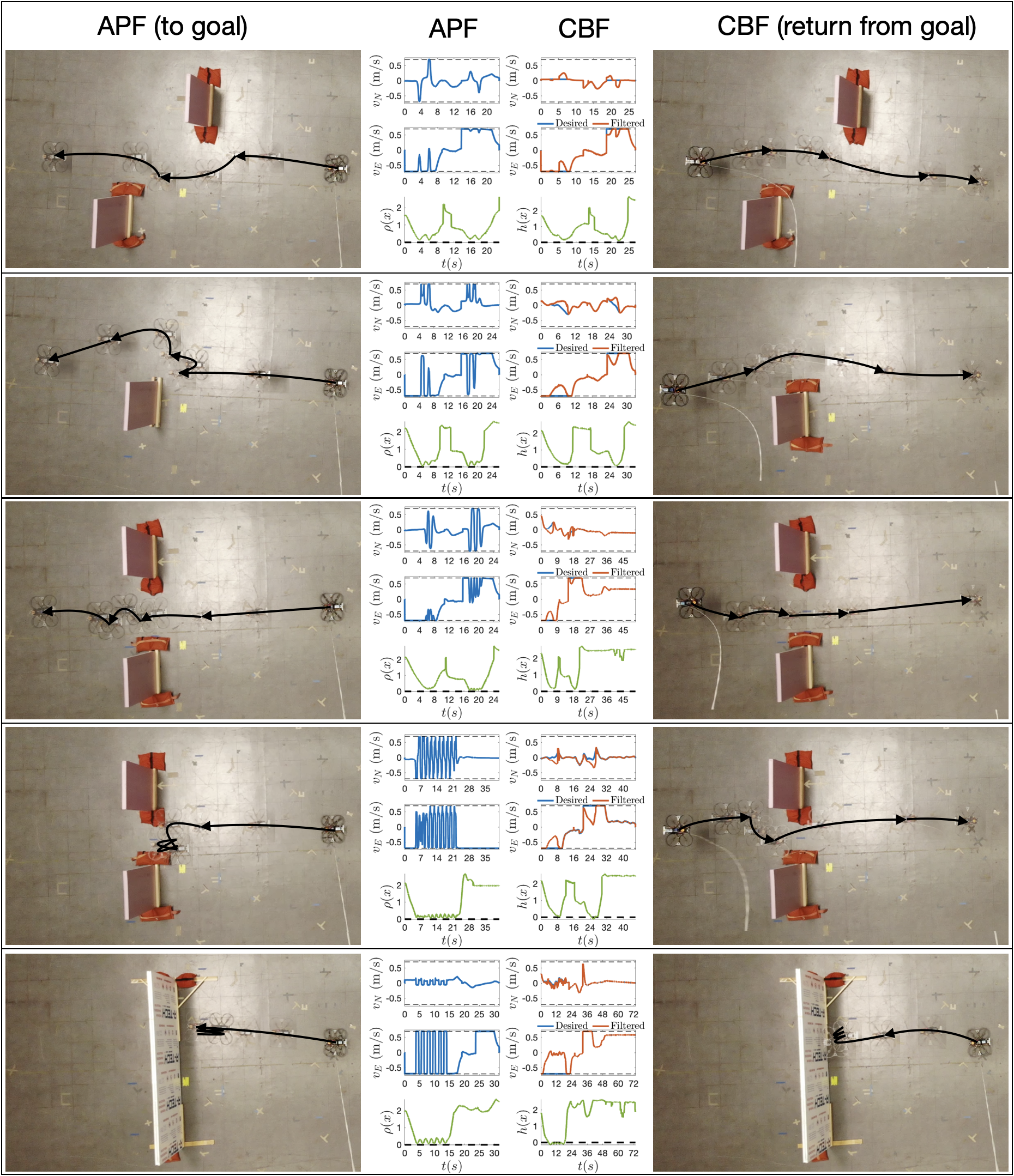
Figure 3: Hardware results for CBF and APF, demonstrating CBF's superior ability to adapt and maintain safety during quadrotor operation.
Conclusion
The analysis provides a comprehensive comparison of CBFs and APFs, underscoring the advantages of CBFs in robotic applications requiring real-time obstacle avoidance. CBFs offer enhanced safety, smoother trajectories, and reduced need for parameter tuning compared to APFs. Future work could explore extending these findings to complex multi-agent systems and other robotic platforms requiring high-dimensional navigation and control.

