- The paper proposes a novel integration of RRT with CLF/CBF-based control, using preserved collision samples to enhance robustness in dynamic environments.
- It employs a min-max linear programming framework to synthesize piecewise linear controllers that balance stability and collision avoidance constraints.
- Experimental and simulation results demonstrate the approach's practicality in adapting to environmental changes without requiring frequent replanning.
Robust Sample-Based Output-Feedback Path Planning
Introduction
The paper "Robust Sample-Based Output-Feedback Path Planning" presents a novel approach to motion planning that combines sampling-based strategies with control-based techniques. The authors propose using a form of Rapidly-exploring Random Trees (RRT) enhanced by Control Lyapunov Functions (CLF), Control Barrier Functions (CBF), and linear programming to address the challenge of navigating dynamic environments with complex obstacles. This method overcomes some traditional limitations by providing robustness to discrepancies between the planned and actual configurations in real-world scenarios.
Methodology
Sampling-Based Path Planning
The core of the proposed method utilizes the RRT strategy to search and build a feasible path from a start point to a goal point. Unlike traditional explicit environmental representations, RRT operates with sampling functions to determine the presence or absence of obstacles at arbitrary points. By generating a tree rooted at the goal and developing paths based on sample trajectories, the algorithm provides an implicit representation of the configuration space.
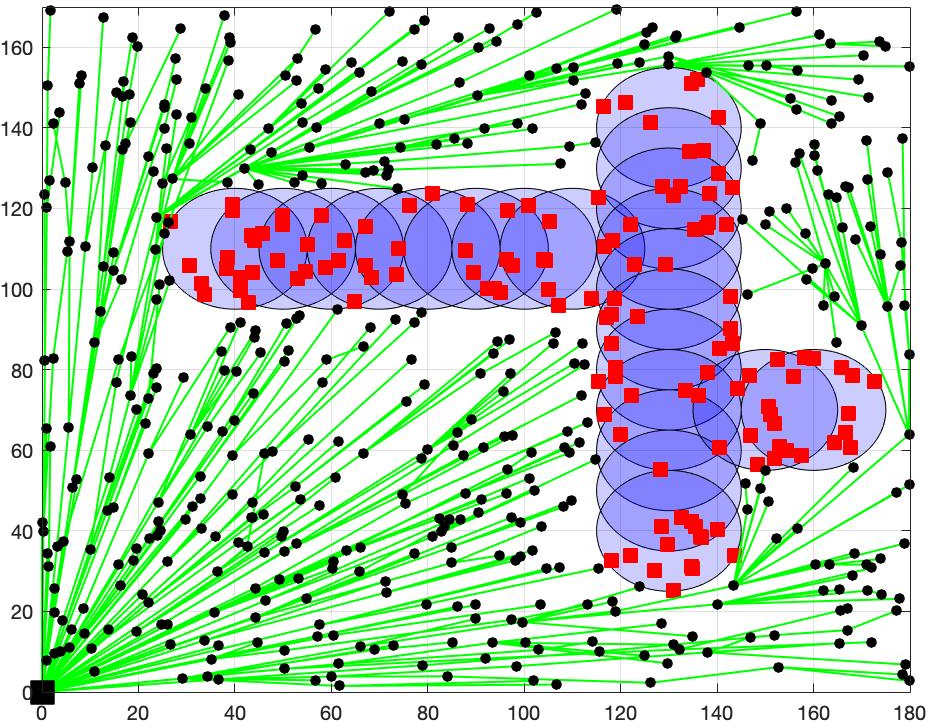
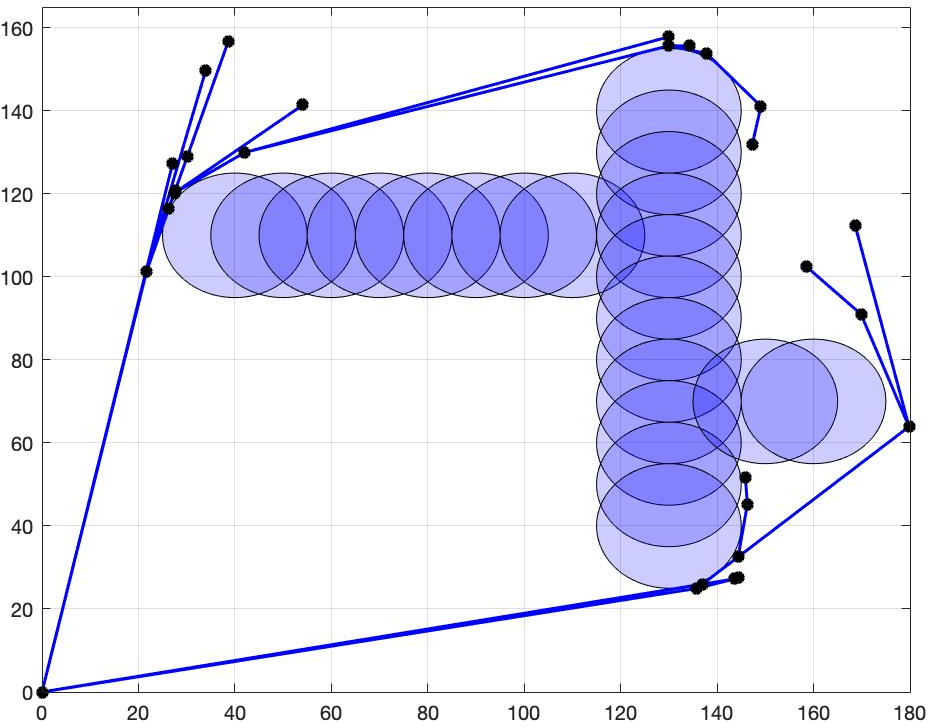
Figure 1: Obstacles are represented by blue circles, and the start point is located at the origin.
The paper modifies the classical RRT algorithm by preserving samples in collision instead of discarding them. These are later used for defining safety constraints in the control synthesis phase. Key modifications include post-processing the tree for minimal node representation while better accommodating collision samples, thereby allowing robust feedback control.
Feedback Control with CLF and CBF
Robust Control Design
The authors propose using CLF and CBF to develop piecewise linear controllers that guide the robot along the RRT-generated paths. The CLF assures stability, driving system states towards desired targets, while the CBF guarantees collision avoidance by ensuring system states remain within safe zones—defined as convex cell regions around nodes of the RRT tree.
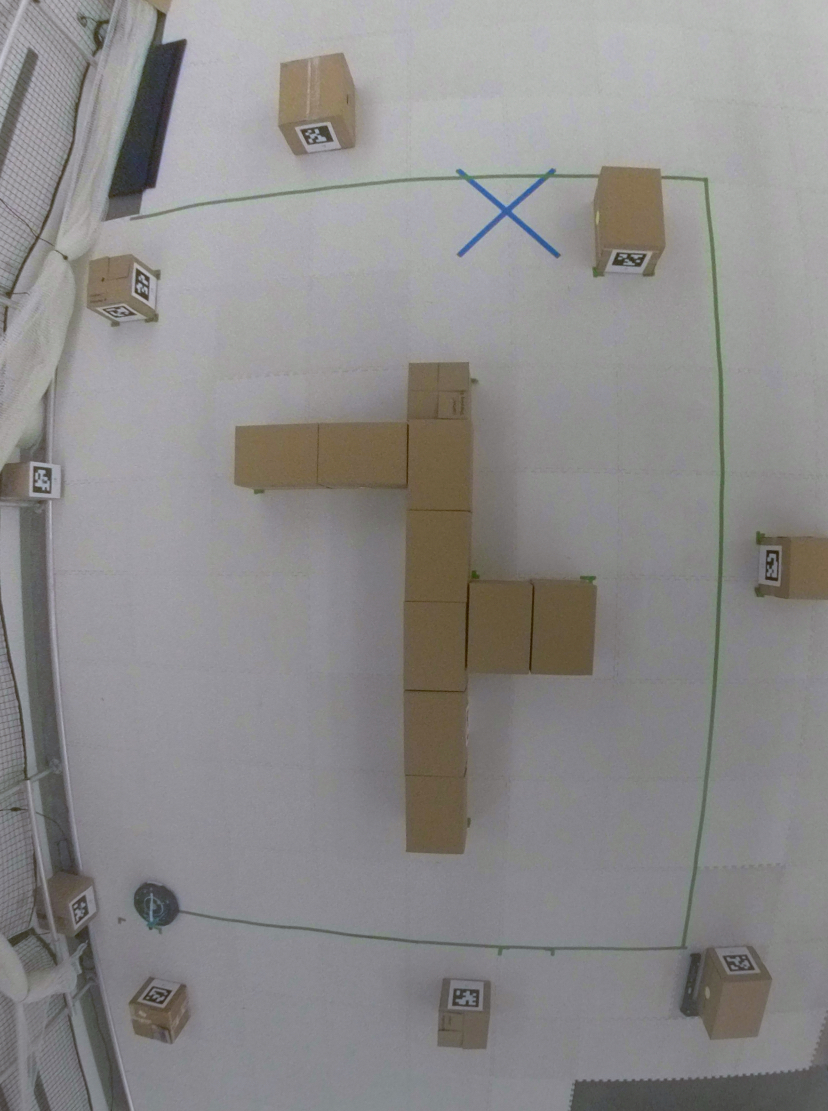
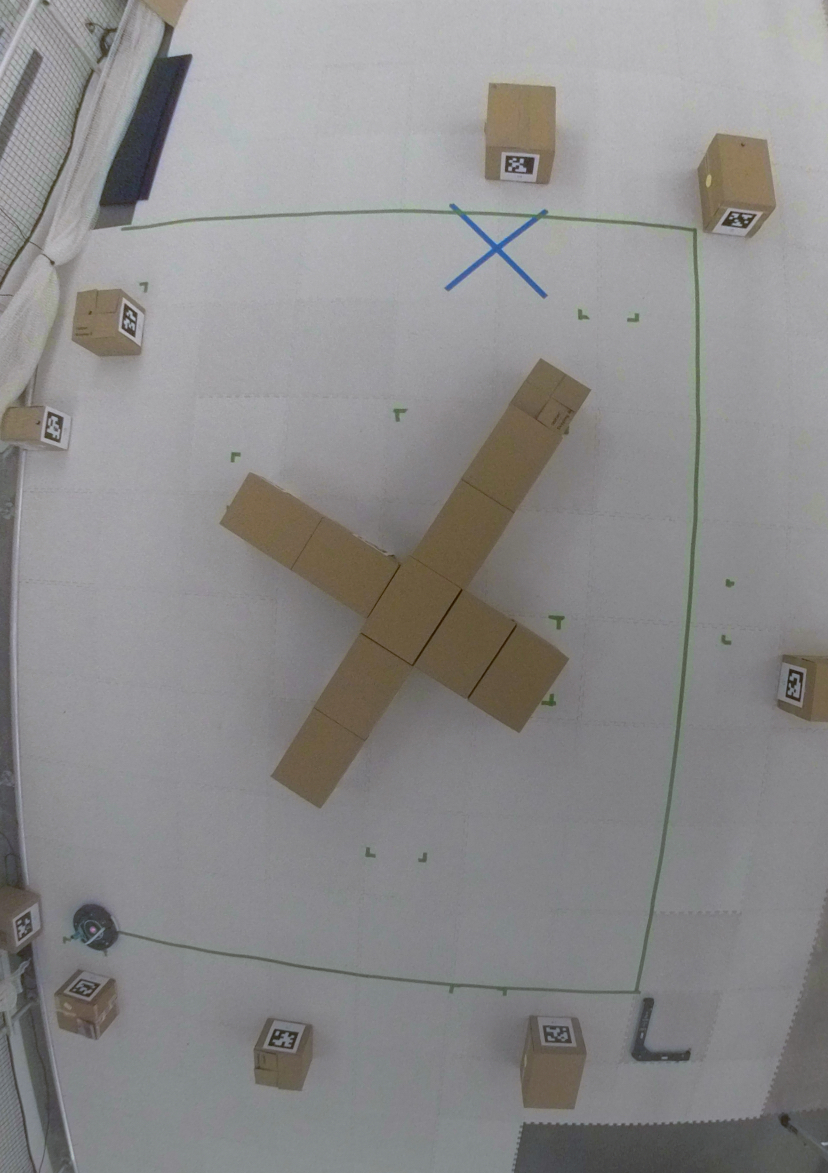
Figure 2: CBF and CLF constraints illustrated for the environment.
A min-max robust linear programming approach is applied to synthesize the control laws. This approach ensures constraints on safety and stability are satisfied for all states within defined regions using sampled landmark positions. The optimization framework is used to generate controllers that balance the CLF for progression toward goals with CBF constraints for safety.
Implementation and Results
Simulation and Experimental Evaluation
The authors performed validation using both simulations and real Create 2 robots equipped with vision systems for landmark recognition. In the simulations, the algorithm handled both predefined and deformed environments successfully, demonstrating the robustness of feedback mechanisms against environmental alterations without the necessity for replanning.
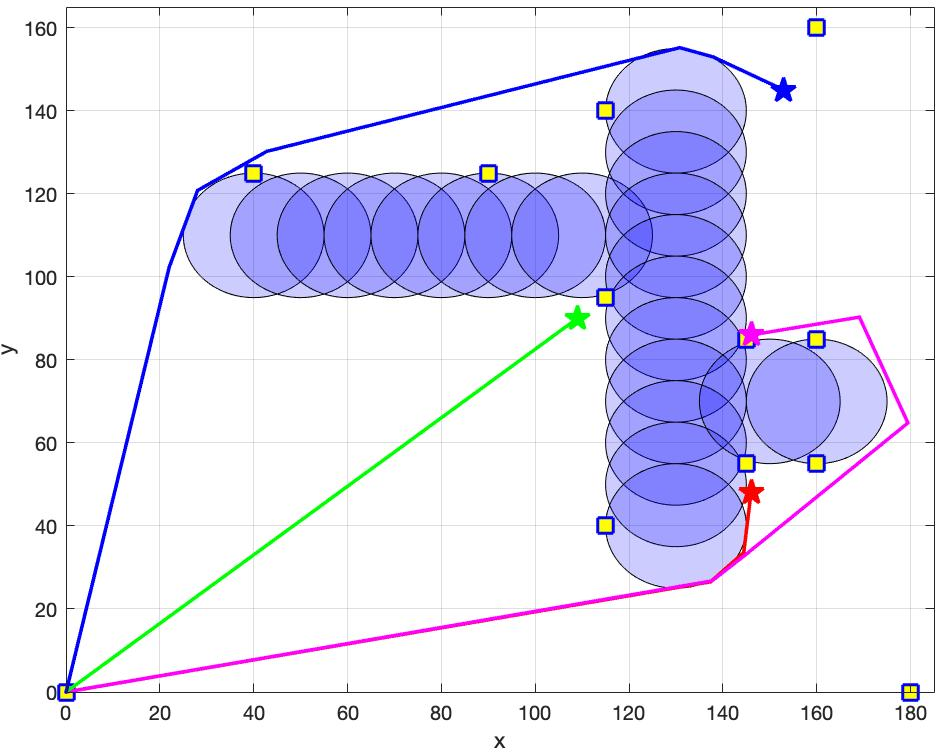
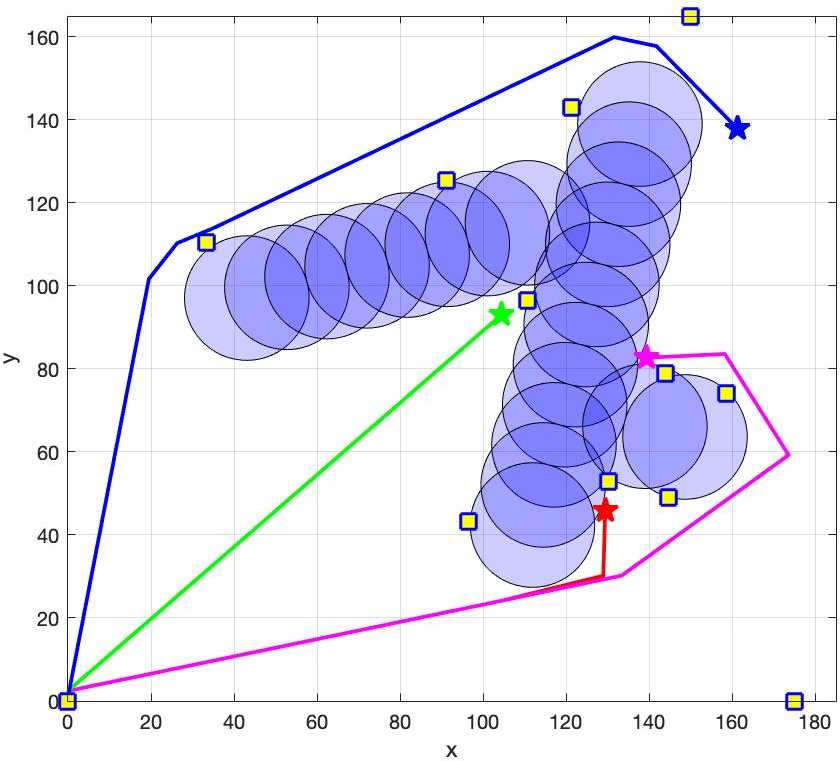
Figure 3: Simulated trajectories showcasing adaptability to environmental changes.
Real-World Experimentation
Using environments populated with visual landmarks (AprilTags), the Create 2 robot was able to navigate from various start points to the objective, even under varied obstacle configurations. The algorithm dynamically adjusted to landmark visibility constraints through real-time feedback, supporting theoretical claims on its robustness and practical adaptability.
(Figure 4 and Figure 5)
Figure 4: The Create 2 robot used for real-world validation and Figure 5: Real trajectories demonstrating continuance through different scenarios.
Implications and Future Directions
The research provides insights into integrating sampling-based path planning with sophisticated control strategies to enhance robustness in navigation tasks. The methodology offers practical alternatives to static environmental approximations and paves the way for improved adaptive control in robotics. Future exploration could formalize the theoretical robustness conditions and further investigate the interaction between path optimality and environmental adaptability.
Conclusion
This paper advances motion planning by combining sampling-based methods with robust feedback control frameworks. By leveraging CLF and CBF in conjunction with RRT modifications, the approach demonstrates significant robustness in both theoretical and experimental domains, suggesting promising directions for real-world autonomous navigation systems and their applications.
This essay provides a concise yet detailed examination of the methodologies and findings presented in the paper, tailored for an audience of experienced researchers.