- The paper presents the LAPP framework that standardizes the integration of mobile robots with laboratory devices using barcodes and fiducial markers.
- It details a complete process from SLAM map generation to digital twin instantiation, emphasizing a protocol-agnostic design for flexible robotic manipulation.
- The framework addresses high integration costs and non-standardization challenges, promising scalable automation and streamlined laboratory operations.
Towards Robotic Laboratory Automation Plug & Play: The "LAPP" Framework
This paper introduces the Laboratory Automation Plug & Play (LAPP) framework, a concept designed to streamline the integration of mobile robots in pharmaceutical laboratories and production facilities. The core idea revolves around equipping laboratory devices with barcodes and fiducial markers, enabling mobile manipulators (MoMas) to automatically discover and interact with them. The authors posit that this framework addresses the challenges posed by the lack of standardization and the high integration costs associated with current laboratory automation systems.
Challenges in Pharmaceutical Laboratory Automation
The authors highlight the increasing need for automation in pharmaceutical laboratories to accelerate drug development and reduce costs. They discuss the limitations of current automation systems, including the absence of universal standards for device interfaces, the complexity of integrating devices from different vendors, and the difficulty of adapting technologies from other industries due to stringent GMP regulations. The paper also points out the limitations of static robots in pharmaceutical manufacturing, where tasks are often dispersed throughout facilities.
Industry Agnostic Evolution of Automation Systems
The authors draw parallels between industrial production and laboratories, emphasizing the importance of end-to-end digitalization and equipment integration. They review the classical vertical integration approach and discuss the need for intelligent infrastructure and horizontal integration approaches like IoT and RAMI 4.0. The paper also discusses the role of OPC UA as a standardized protocol for communication between industrial equipment and systems. Furthermore, the I4.0 Asset Administration Shell (AAS) concept is introduced as a structured interface for connecting I4.0 to physical assets.
Specifics of Laboratory Automation
The paper explores the specific requirements of automated laboratories, differentiating between high-throughput systems optimized for repetitive tasks and hybrid human-robot operations requiring greater flexibility. It acknowledges that while many laboratory devices are automated as self-contained units, they are not designed for integration into larger automation systems. Various approaches to process representation are discussed, including BPMN, as well as instrument communication and control approaches, such as SiLA and LADS.
MoMa Technologies
The authors discuss different configurations for laboratory robotics solutions, contrasting fixed-position robots with MoMas. MoMas are presented as a means to increase flexibility by navigating to different stations, picking up objects, and loading them into devices. The use of fiducial markers for object localization is also discussed. Several commercially available MoMa solutions are mentioned, highlighting the increasing adoption of mobile robotics in laboratory automation. The authors also present a table comparing stationary robots, MoMas, and humans regarding throughput, availability and flexibility.
Laboratory Automation Plug & Play - Concept Proposal
To address the limitations of current approaches, the authors propose the LAPP framework. This framework involves equipping laboratory devices with a barcode for referencing device information and a fiducial marker for pose detection. This allows a robot to access an online database and fetch device-specific information.
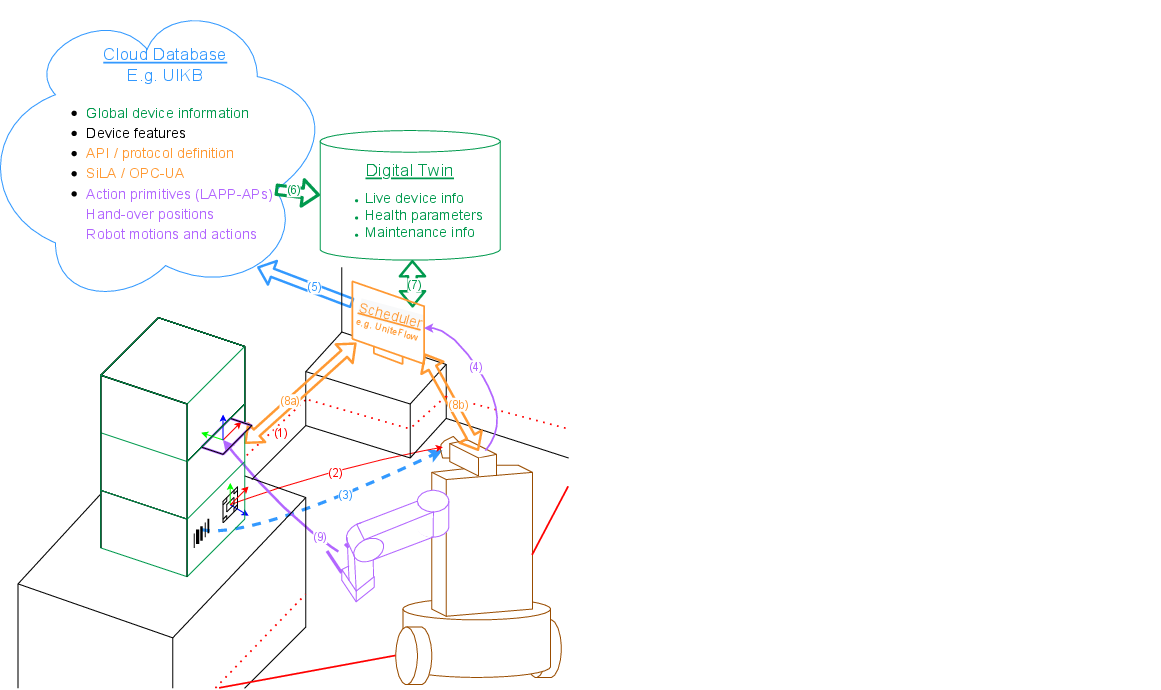
Figure 1: The LAPP sequence (1) Generate map, (2) Detect barcode, (3) Detect fiducial pose, (4) Upload barcode ID to the scheduler, (5) Request device information from the cloud database, (6) Instanciate digital twin from the cloud database, (7) Keep digital twin updated, (8a) Device control, (8b) Robot control, (9) Robotic manipulation.
The LAPP framework encompasses a sequence of steps for autonomous discovery and interaction with laboratory devices. The paper details the process from map generation using SLAM to robotic manipulation based on fetched action primitives. They state that the proposed framework is protocol agnostic, allowing for various technical implementations. Key components include a scheduler software, a communications standard (e.g., SiLA), a robotic middleware (e.g., ROS), a vision system for fiducial marker detection, and LAPP-APs. The authors introduce the concept of LAPP-APs as a structured representation for mechanical interactions needed to operate devices with a robot.
Discussion, Outlook and Future Work
The authors emphasize the need for industry-wide involvement to realize the full potential of the LAPP framework. They suggest that the framework can be applied not only in R{content}D but also in analytics and QC laboratories, as well as in pharmaceutical manufacturing. Future work will focus on elaborating the LAPP-AP concept and defining specific technologies for implementation.
Conclusion
The paper presents a compelling vision for the future of laboratory automation, where mobile robots can seamlessly integrate with laboratory devices through a standardized Plug & Play framework. The proposed LAPP framework addresses key challenges in the pharmaceutical industry and has the potential to accelerate drug development and reduce costs. The authors acknowledge that further research and industry collaboration are needed to fully realize the benefits of this approach.