- The paper introduces a multi-stop delivery system leveraging a heuristic A* algorithm and skyway network with rooftop nodes.
- It details an integrated architecture combining hardware, software, and a GUI to monitor drone position in a 3D model of Sydney CBD.
- The study demonstrates practical use of recharging nodes and LoS path computation to optimize delivery times and ensure urban safety.
Autonomous Drone Package Delivery in Skyway Networks
This paper introduces a system for multi-stop drone package delivery within a defined geographic area, leveraging a "skyway network" concept. The skyway network incorporates flight regulations, including restricted and no-fly zones, with nodes typically located on building rooftops that can serve as recharging stations and delivery points. The system employs a heuristic-based A* algorithm to determine optimal paths, considering constraints such as delivery time and availability of recharging stations. The drone delivery system is deployed in an indoor testbed using a 3D model of Sydney CBD, and a GUI is provided to monitor real-time package delivery.
System Architecture and Components
The system is composed of environment and hardware components, as well as software components.
Environment and Hardware
To mitigate the risks associated with outdoor drone operation in urban environments, the authors created a 3D model of Sydney CBD as an indoor testbed (Figure 1).
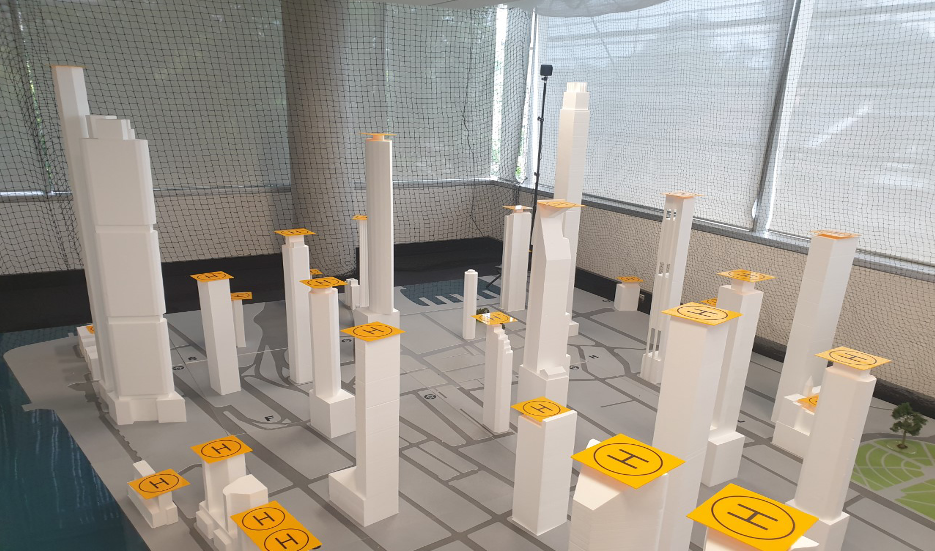
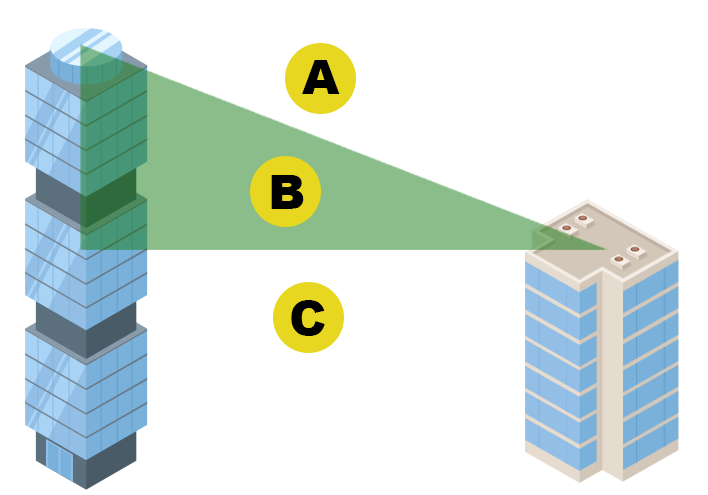
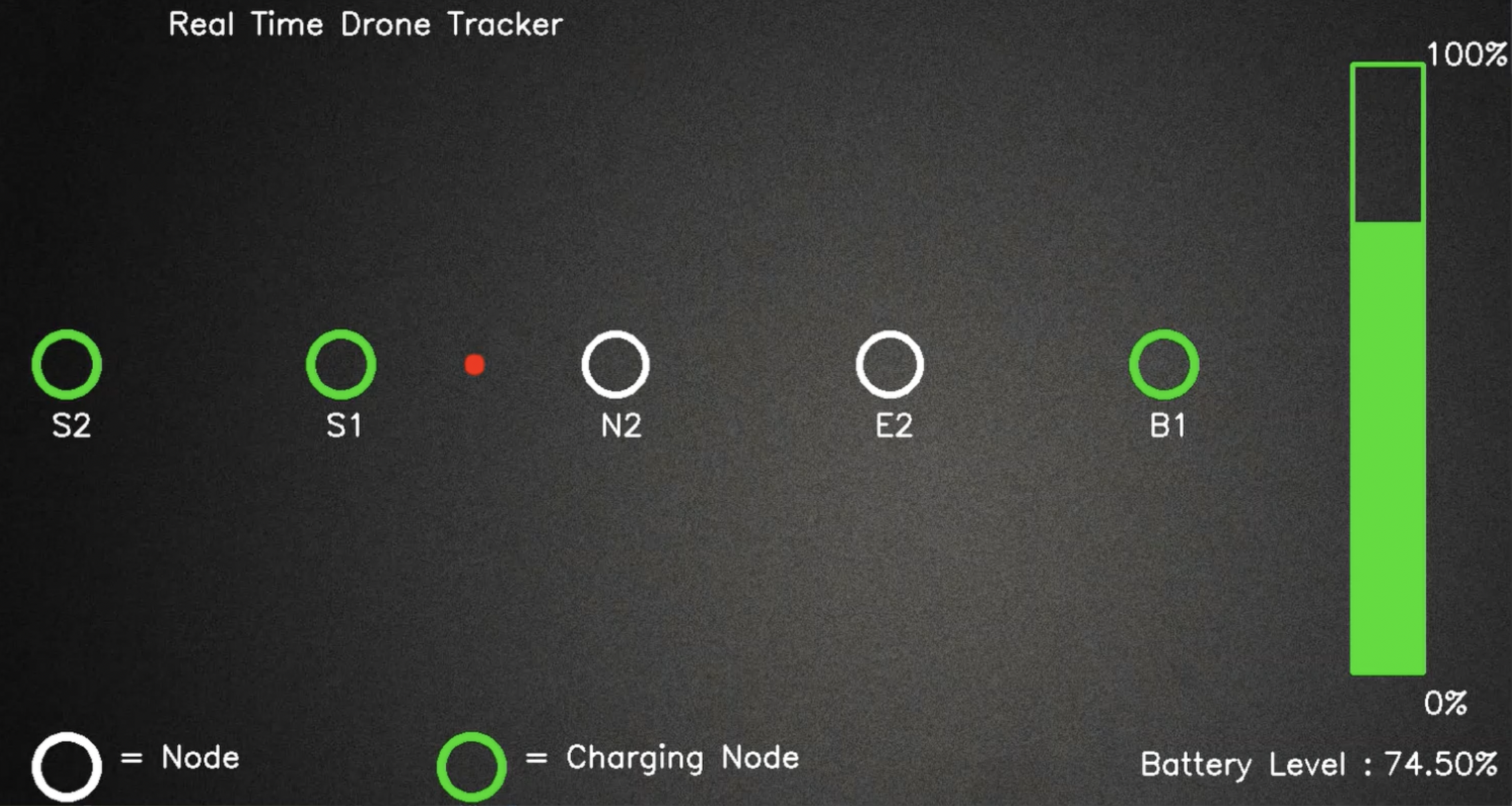
Figure 1: A 3D model of Sydney CBD is used as an indoor testbed for the drone delivery system.
This environment allows for controlled experimentation with a skyway network that incorporates virtual barriers representing no-fly zones and restricted areas. A DJI Tello EDU drone was selected for its safety, small size, and robustness for indoor flight.
Software
The software architecture comprises four key components:
- Skyway Network Construction: This component computes LoS paths between building rooftops to create the skyway network, factoring in drone flight regulations and no-fly zones.
- Optimal Path Computation: A heuristic-based A* algorithm calculates the optimal path from source to destination.
- Flight Navigation: This component controls the drone's autonomous flight along the LoS paths within the skyway network, using the DJI Tello EDU drone.
- Graphical User Interface (GUI): A GUI allows users to monitor the drone's position and battery status during delivery operations (Figure 2).
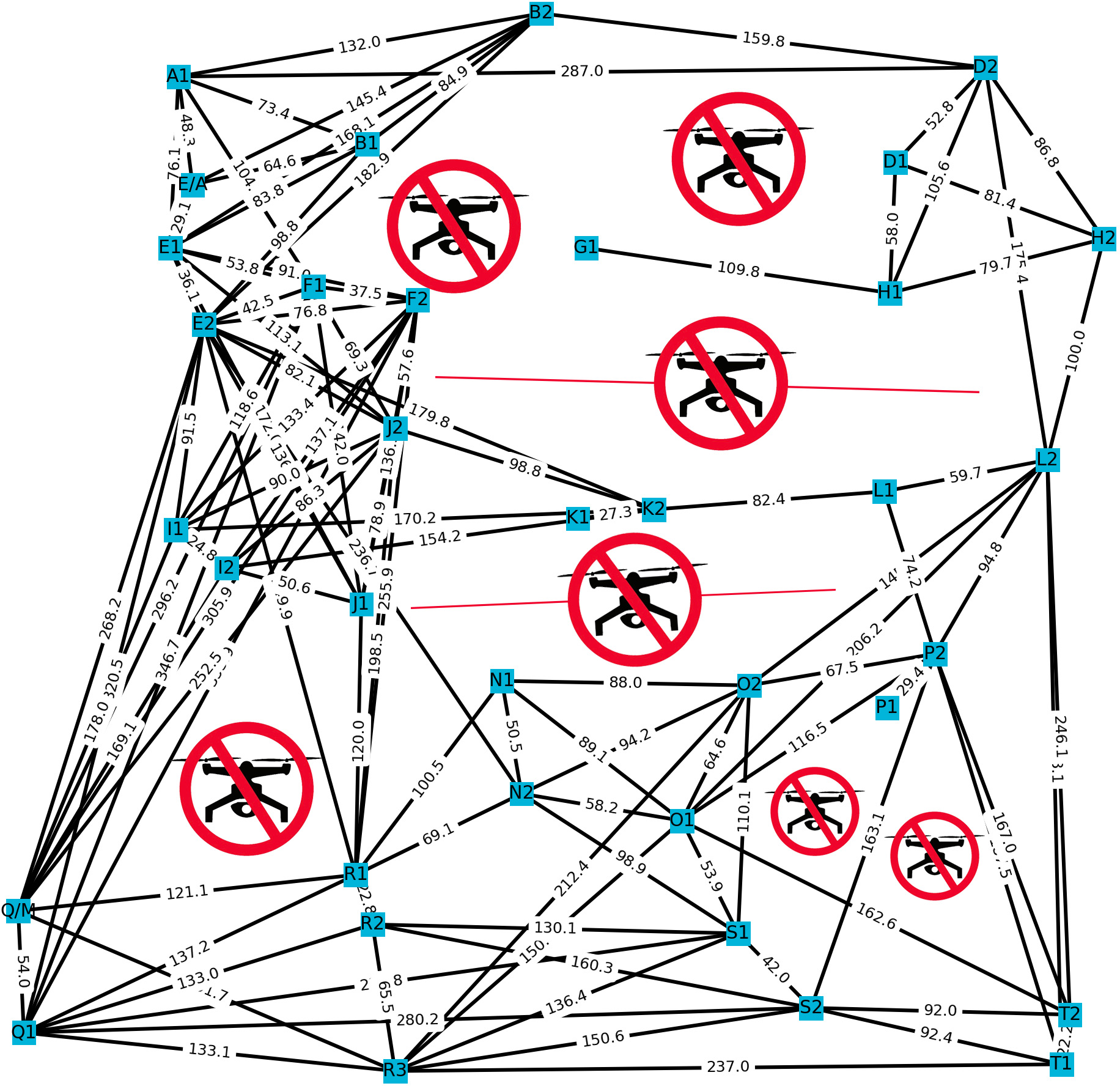
Figure 2: A GUI is used to monitor the drone's position during the delivery operation.
Skyway Network and LoS Path Computation
The skyway network is constructed using the (x, y, z) coordinates of building rooftops, considering LoS requirements and avoiding no-fly zones. The LoS algorithm detects intersecting buildings between nodes to establish feasible skyway paths. The algorithm constructs a rectangular polygon representing the path between two nodes, considering the drone's width. It then identifies nodes intersecting this polygon on the xy-plane to reduce the search space. A right-angle triangle is constructed using the heights (z-axis) of the buildings (Figure 3).
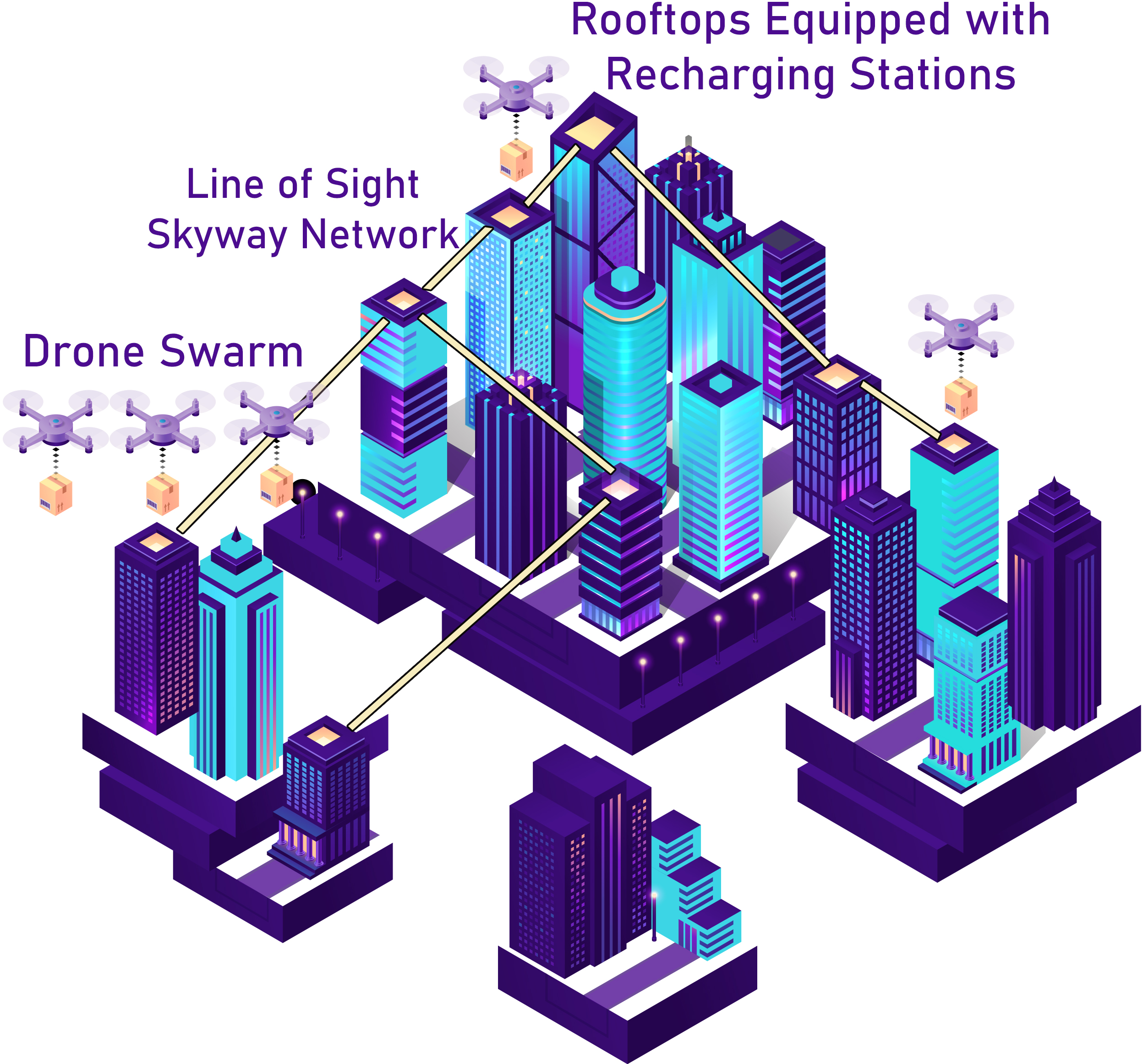
Figure 3: Drone delivery is demonstrated within a skyway network, illustrating the integration of nodes as building rooftops.
Nodes above the triangle obstruct the LoS path, while those below or within do not. This process continues until all possible LoS paths are computed and connected, forming the skyway network (Figure 4).
(Figure 4)
Figure 4: A skyway network is constructed, complete with designated no-fly zones to ensure safe and compliant drone operation.
Optimal Path Composition and Flight Navigation
A temporal optimal path, defined as the fastest route, is computed using a heuristic-based A* algorithm. The system considers the drone's battery capacity and incorporates intermediate recharging stations when necessary. The DJI Tello EDU drone navigates autonomously using mission pads for precise movements. The drone detects the next node position in the computed path and rotates to face the correct direction before traversing the LoS path. This process repeats until the package is delivered to the destination.
Conclusion
The paper presents a comprehensive system for multi-stop drone package delivery within a skyway network. The system effectively integrates flight regulations and practical constraints, such as battery life and recharging needs, to enable autonomous drone navigation in urban environments. The use of a 3D model for indoor testing provides a safe and controlled environment for system development and evaluation.