- The paper presents a novel approach to model hydraulic actuator dynamics using optimized excitation signals and system identification techniques.
- It validates model accuracy through Simscape simulations, comparing chirp and multisine responses with low RMSE values.
- An NPID controller with Ziegler-Nichols tuning is applied for precise position tracking, highlighting advances in control design.
System Identification and Controller Design for Hydraulic Actuator
Abstract
The study presents an analysis of system identification and controller design for electro-hydraulic servo actuator systems (EHSAS), which are vital in diverse industries such as aviation. It discusses the complexity involved in modeling these systems due to their dynamic nature and proposes a methodology for selecting excitation signals based on the system's bandwidth. The research evaluates the modeling accuracy through system identification techniques and validates with nonlinear models simulated in Simscape.
Introduction
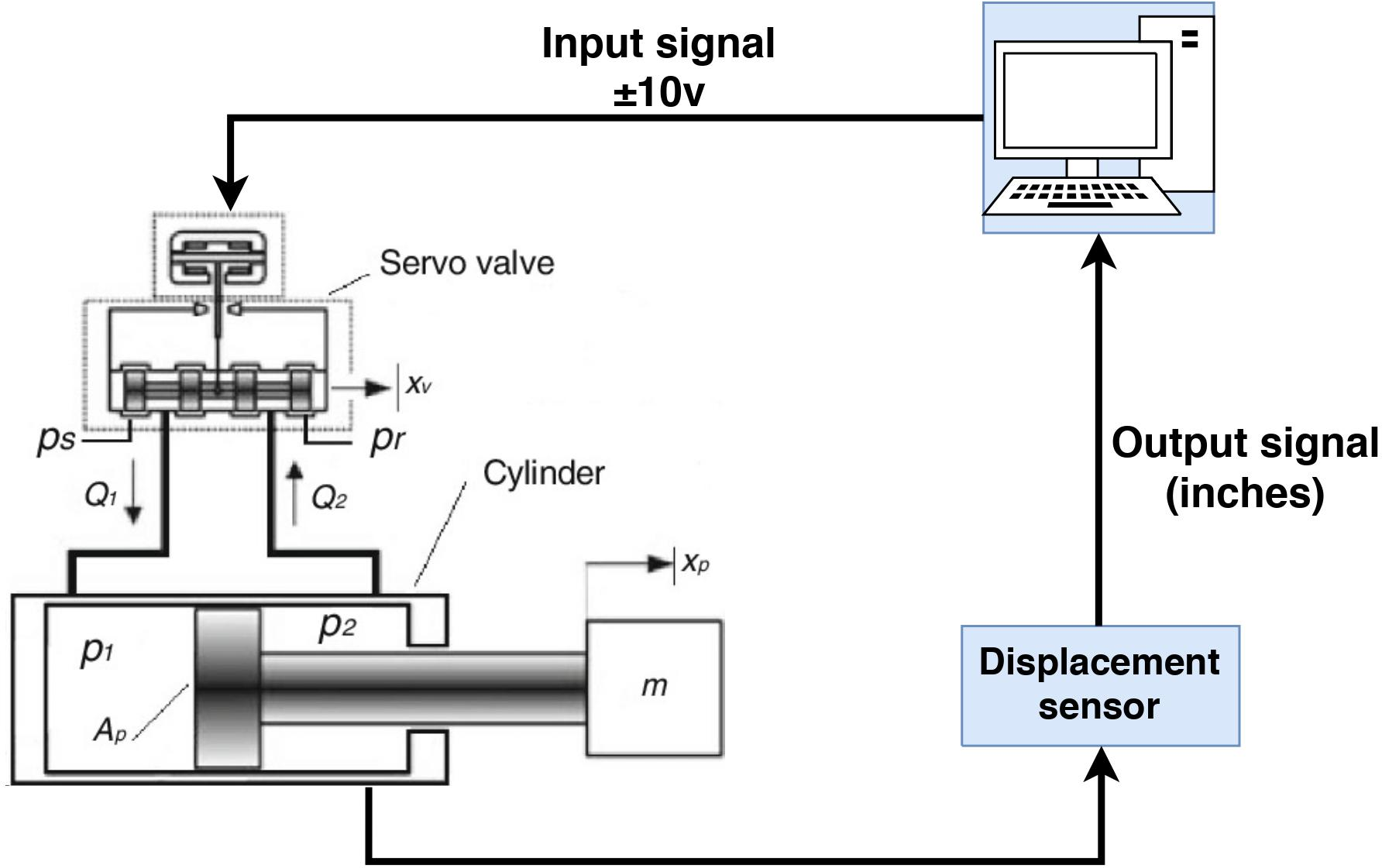
Hydraulic actuators serve critical roles in industries due to their reliability and efficiency, particularly in flight simulators and industrial machinery. Precise control of these actuators is a significant focus area in dynamic modeling and control research. System identification is required to model the EHSAS accurately, which enables efficient control despite challenges like nonlinearity, friction, and noise.
The paper emphasizes using black-box modeling, with excitation signals tuned to the hydraulic actuator's dynamics for enhanced model fidelity. Post identification, a nonlinear PID (NPID) controller is applied to achieve precise motion control, with the research backing its claim through simulations that indicate high accuracy in mathematical modeling and control execution.

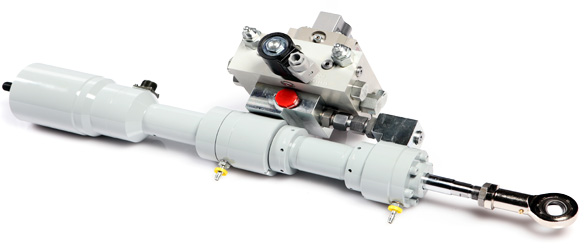
Figure 1: Example of a flight simulator with individual hydraulic actuator.
Methodology
The methodology targets dynamic modeling of EHSAS by leveraging software tools such as Simulink for nonlinear system simulation. The approach involves:
Experimental Validation and Controller Design
Validation of model accuracy is performed by comparing its output against the nonlinear model's. The paper highlights the RMSE between measured outputs from chirp and multisine signals, demonstrating high fidelity in captured dynamics.
Controller Design: An NPID controller is employed on the identified model to fine-tune the position tracking and performance parameters. Using Ziegler-Nichols tuning enhances the controller's response to track reference signals effectively.
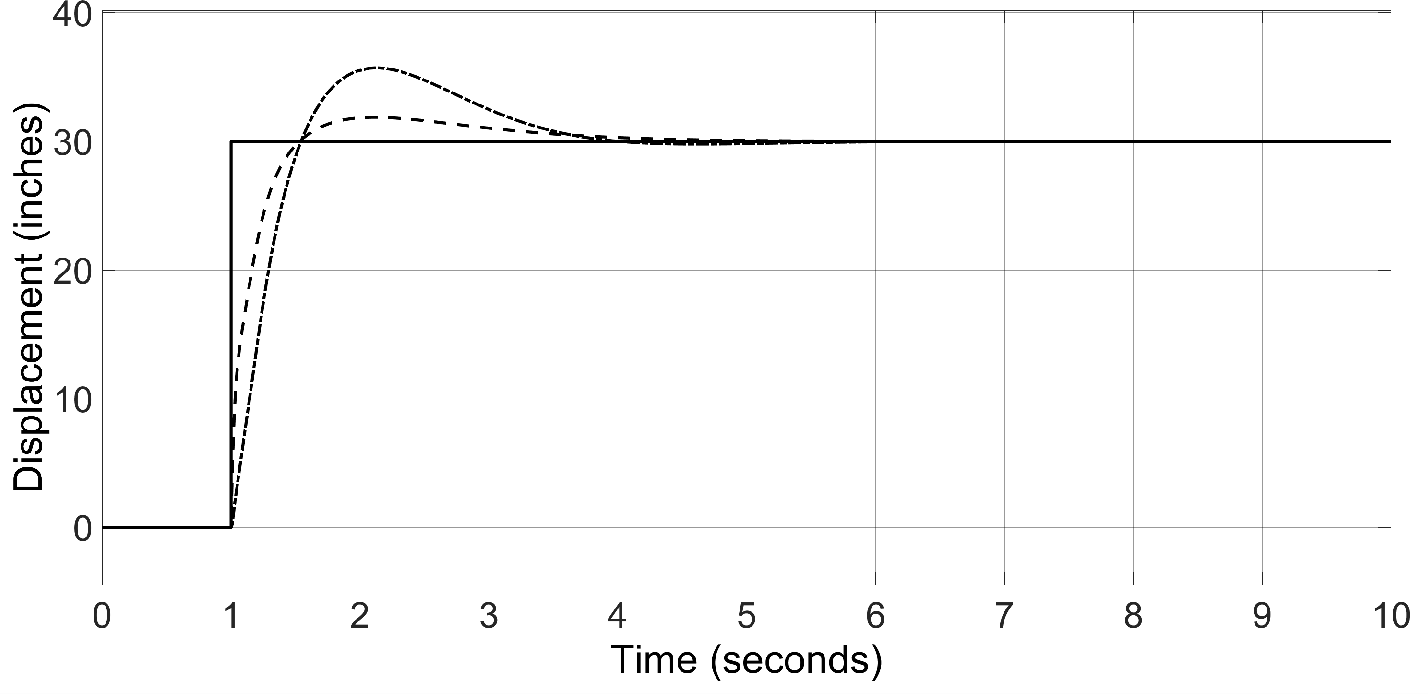
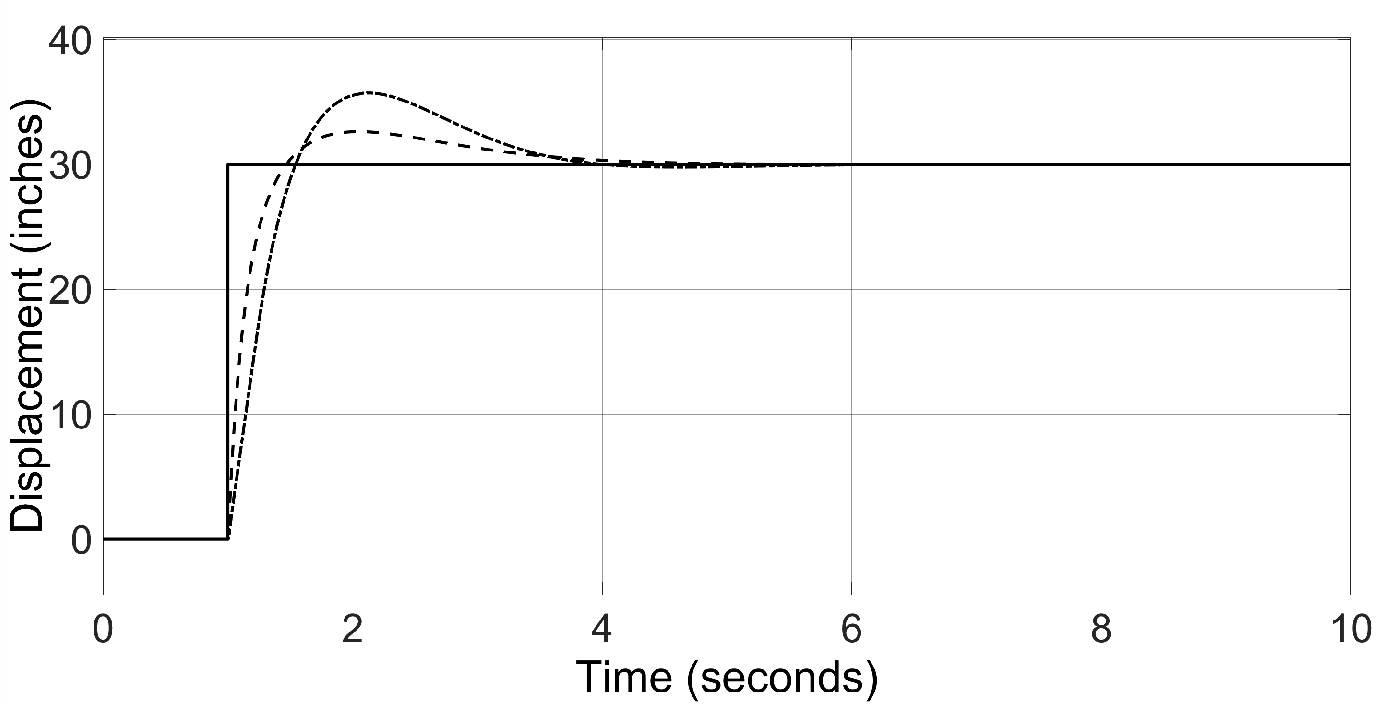
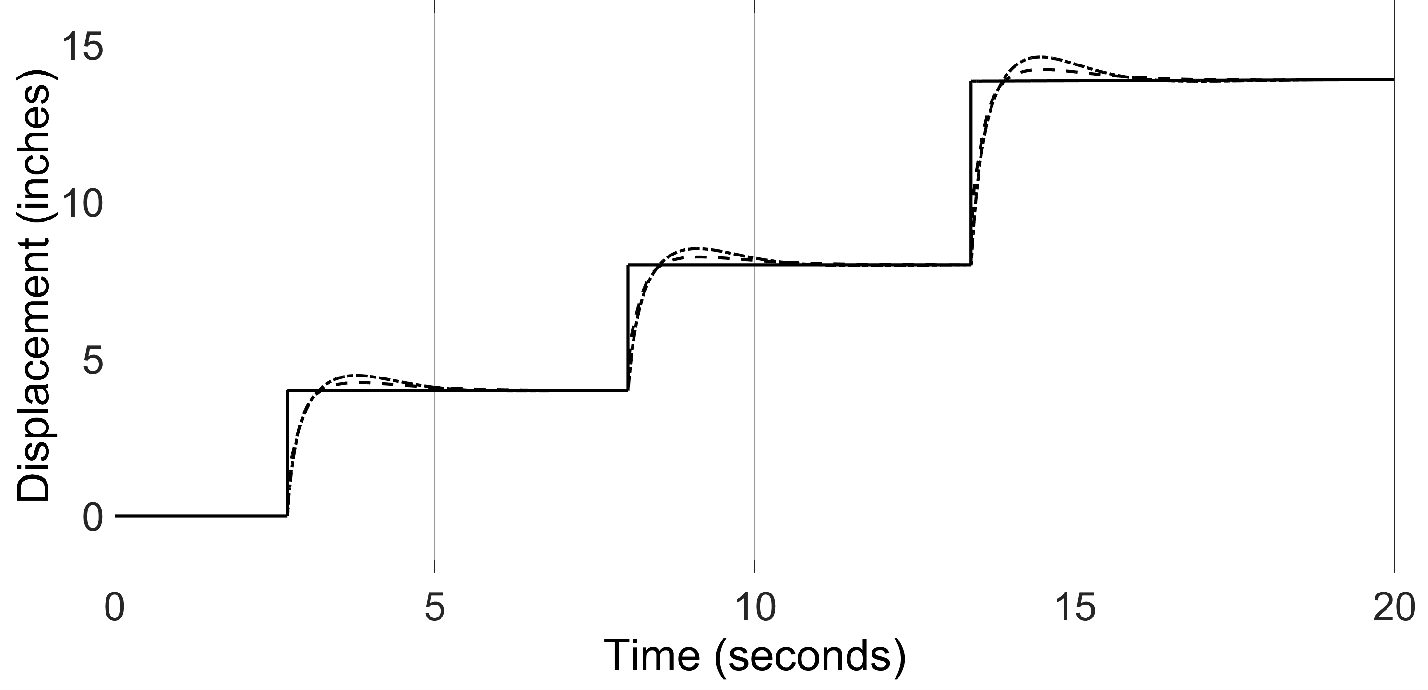
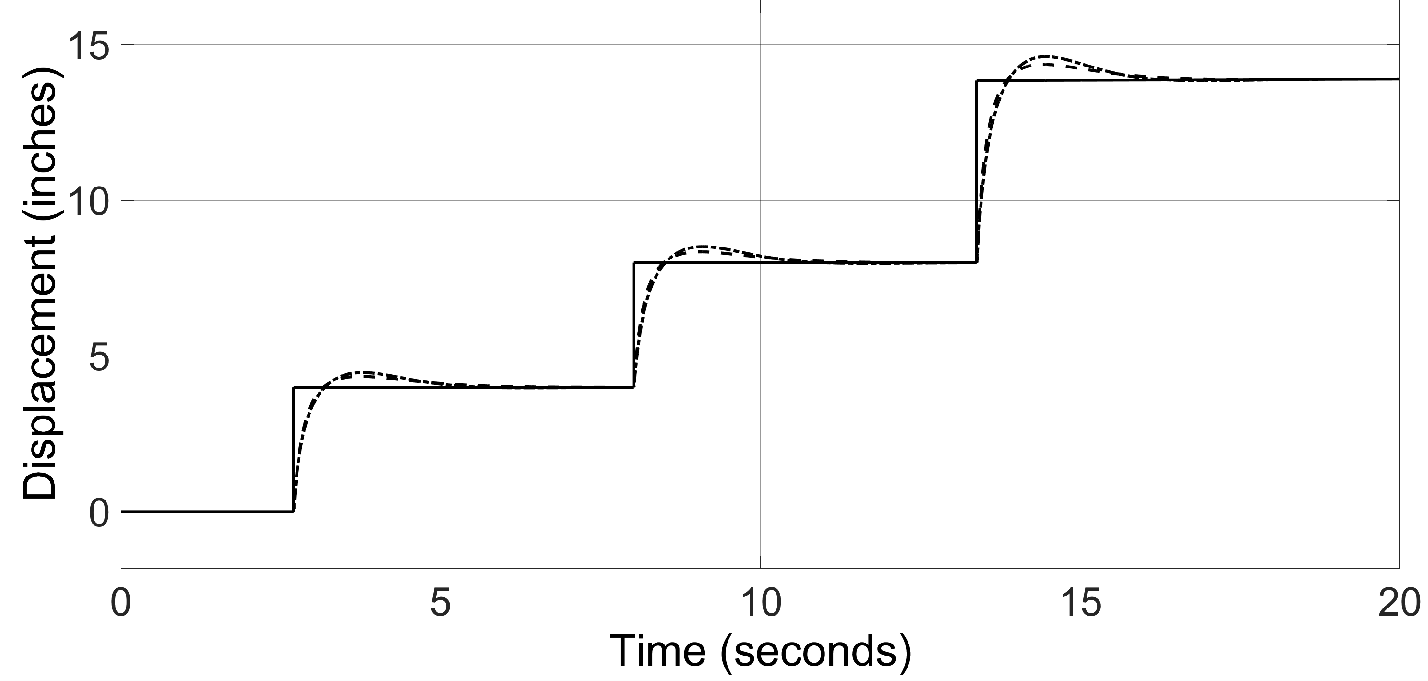
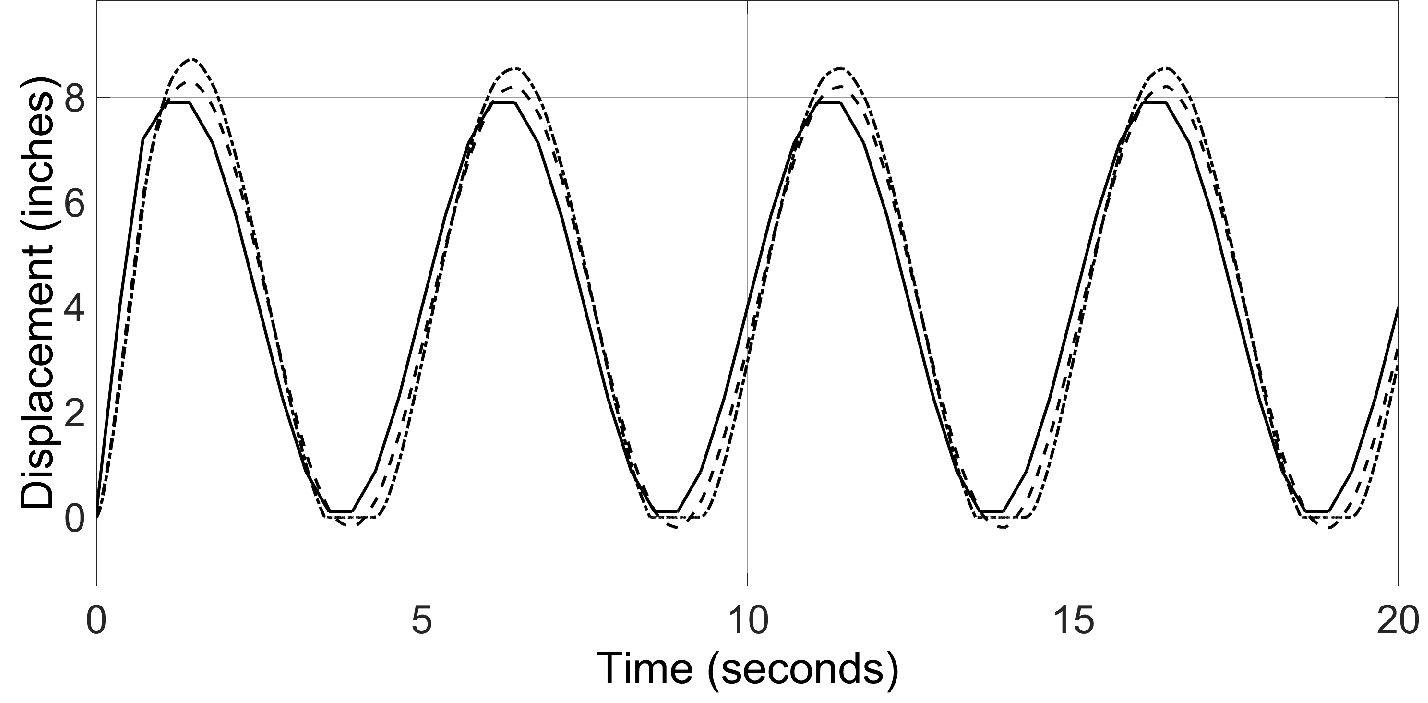
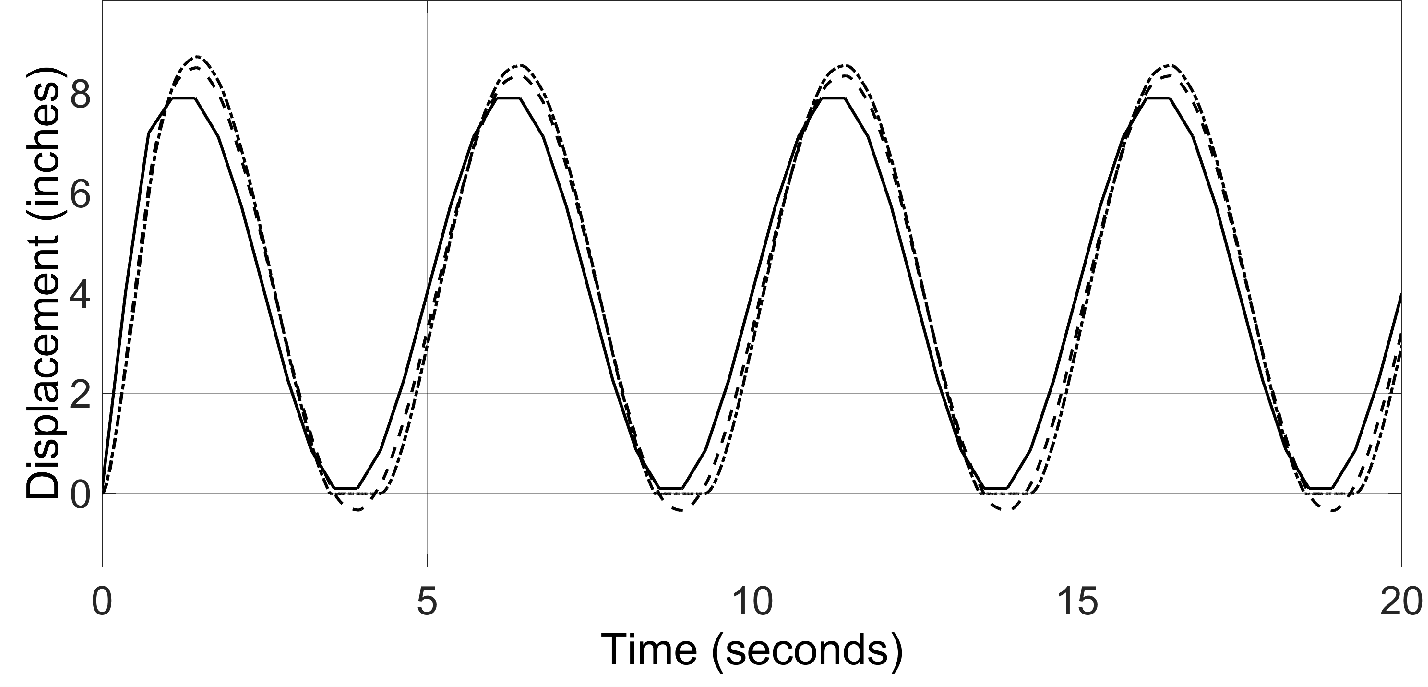
Figure 3: Step Response Comparison for Chirp Identified Model.
Implications and Future Directions
This research establishes a precedent for selecting excitation signals concerning actuator dynamics, fundamentally increasing system identification accuracy. It presents a framework for subsequent works to explore varying models of actuators and control designs.
Experimentation with different control algorithms, their hybridization with AI methods, and real-world application validations form the basis for future advancements. Such continuous development could potentially iterate on this method's efficacy and adaptability across diverse actuator models.
Conclusion
The research offers a comprehensive framework for system identification and controller design in hydraulic actuators. By correlating excitation signals with system dynamics, it achieves unparalleled accuracy in modeling, which is crucial for implementing effective control systems in industrial and aviation applications. Future efforts will focus on extending these methodologies to real-world applications to further validate and refine the findings.