- The paper introduces a novel hydrodynamic model for swarmalators showing how non-reciprocal forces produce topologically protected travelling-wave solutions.
- It derives a continuum model from a kinetic framework, linking velocity alignment and phase synchronization through hyperbolicity conditions.
- Numerical simulations validate the model by demonstrating coherent segregation and stable topological states with implications for swarm robotics.
Topological States and Continuum Model for Swarmalators Without Force Reciprocity
Introduction
The paper "Topological states and continuum model for swarmalators without force reciprocity" (2205.15739) introduces a novel model for swarmalators, systems of self-propelled particles that also act as oscillators, and explores the absence of force reciprocity. In this setup, when one particle exerts an attractive force, the counterpart exerts a repellant force, resulting in pursuit dynamics. A hydrodynamic model of this swarmalator system is derived, showcasing specific travelling-wave solutions with non-trivial topological characteristics.
Hydrodynamic Model Derivation
The study establishes a hydrodynamic limit from a kinetic description. Notably, it highlights the interaction between velocity alignment and phase synchronization, defining an explicit doubly-periodic travelling-wave solution in two-dimensional space. The absence of reciprocity in interaction forces leads to a compelling pursuit behavior, contrasting with classical symmetrical interaction models. This non-reciprocity is critical to the observed topology of the solutions.
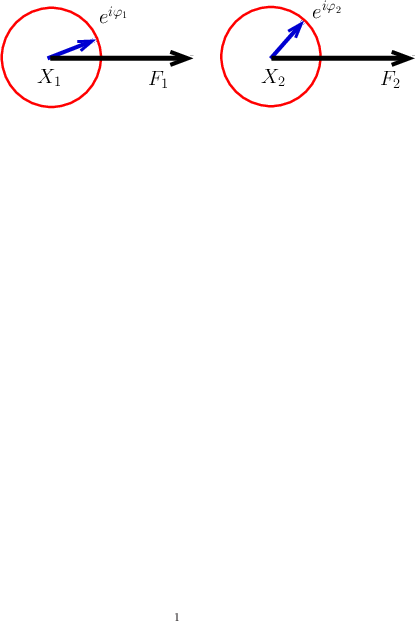
Figure 1: Pursuit dynamics between two particles located at X1 and X2. The forces acting on these particles illustrate the pursuit behavior.
Stability and Hyperbolicity Analysis
The paper examines the stability of these travelling-wave solutions by investigating hyperbolicity conditions. The analysis reveals that stability is contingent upon the relationship between interaction parameters and configurations, particularly the angle between orientation and phase gradients. It emphasizes that under certain conditions, perturbations may lead to loss of hyperbolicity, thereby affecting solution stability.
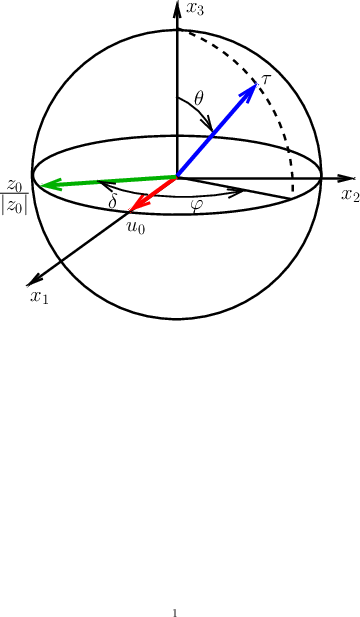
Figure 2: Geometric setting of the hyperbolicity analysis, highlighting the spatial configuration crucial for understanding the model's stability.
Numerical Simulations
Numerical simulations are used to validate the hydrodynamic model and illustrate the formation of topologically protected states. These simulations demonstrate that the swarmalators maintain coherent topological states over time, influenced by the level of noise in phase dynamics. The particles exhibit segregation into distinct regions based on phase, separated by low-density interfaces.
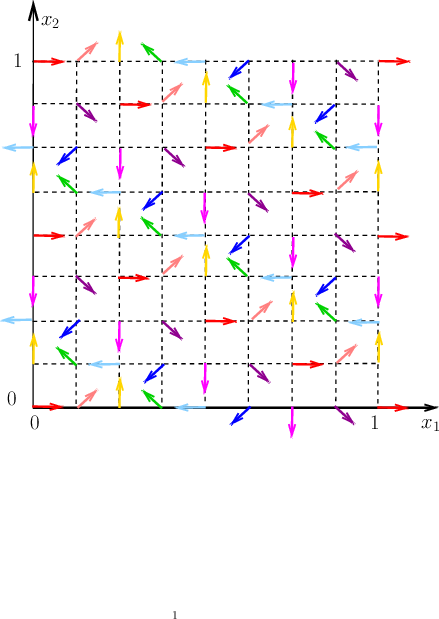
Figure 3: Plot of the phase field α(x,0) (when α0=0) for specific travelling-wave solutions showcasing non-trivial topology.
Implications and Future Directions
The implications of this research are significant, providing insights into the collective dynamics of systems where interaction forces deviate from classical symmetrical laws. The introduction of non-reciprocal interactions opens new avenues in designing artificial systems with emergent behaviors that mimic biological organisms. Future work may explore topological characteristics, leveraging the robust topological structures identified in these systems for applications in swarm robotics and collective algorithm design.
Conclusion
This paper provides a comprehensive analysis of a novel swarmalator model that eschews traditional force reciprocity, revealing new topological states in collective dynamics. By deriving and numerically validating a continuum model, it lays the groundwork for future explorations into non-reciprocal interactions and their role in natural and artificial systems.