- The paper introduces a geometry-constrained neural implicit representation to mitigate shape-radiance ambiguity in indoor scene reconstruction.
- It integrates depth and normal priors from MVS and learning networks, enhancing the fidelity and structural integrity of texture-less regions.
- Experimental results on ScanNet reveal improved F-ratios and accuracy, underscoring its potential for VR/AR and autonomous mapping applications.
NeuralRoom: Geometry-Constrained Neural Implicit Surfaces for Indoor Scene Reconstruction
NeuralRoom proposes a novel approach in reconstructing indoor environments by leveraging geometry-constrained neural implicit surfaces derived from images. This paper addresses indoor scene reconstruction's inherent challenges, such as shape-radiance ambiguity, which often hampers the efficacy of current neural rendering methods when applied to texture-less environments typical of indoor settings.
Method Overview
Geometry-Constrained Neural Implicit Surfaces
NeuralRoom utilizes implicit neural representations to overcome the shape-radiance ambiguity in indoor reconstructions. The method begins with acquiring geometry priors, which consist of depth and normal estimations derived from multiview stereo methods (MVS) and learning-based normal estimation networks, respectively.
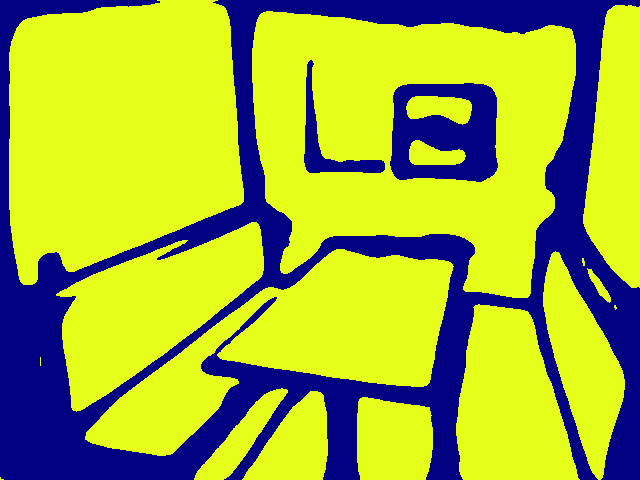

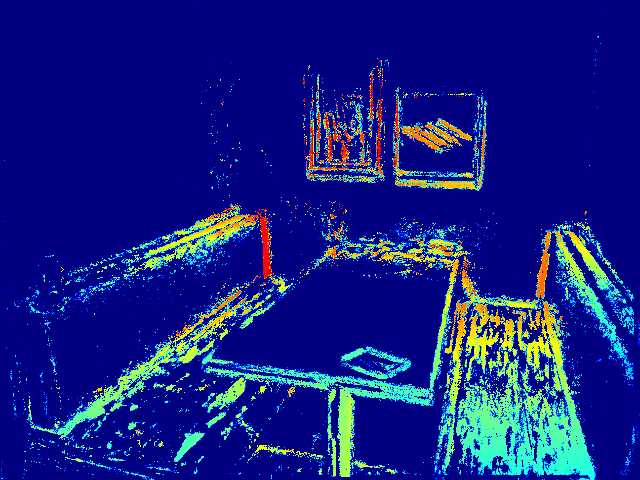
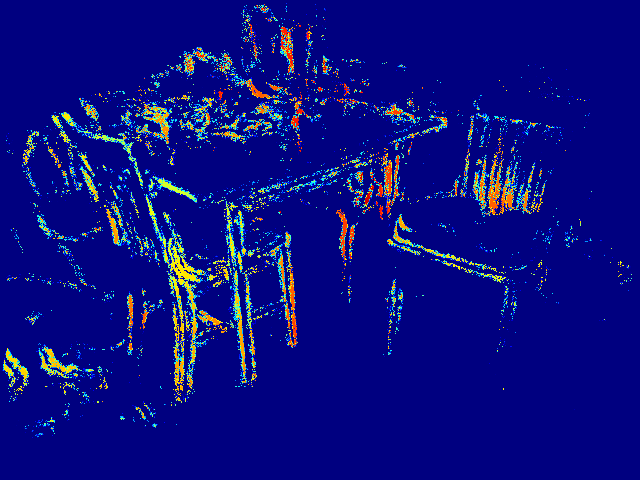

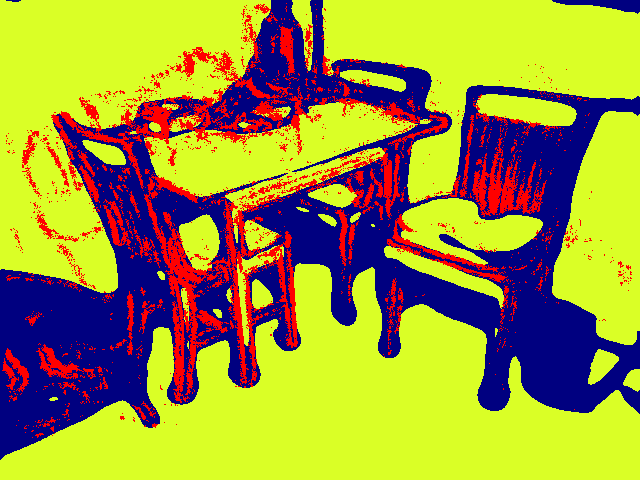
Figure 1: Different areas in which priors take effect.
NeuralRoom involves rendering from 2D images with known camera parameters, guided by geometric priors to ensure that the reconstructed scene coheres with the original images in terms of texture and structural integrity.
Training NeuralRoom with Perturbation-Residual Restrictions
To enhance the continuity and smoothness of the reconstructed surfaces, the paper introduces perturbation-residual restrictions. These constraints assume a local uniformity in normal direction and minor variation in distance across neighboring surface segments. This approach helps maintain continuity and prevent discrepancies commonly induced by similar texture-less surfaces with distinct physical separations.
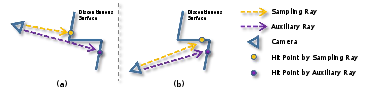
Figure 2: Two cases illustrating perturbation-residual restriction.
Image Processing and Mesh Extraction
Starts with preprocessing image sequences, capturing optimal images for stereo matching using the Laplacian filter for blurriness detection. After constructing the distance and normal priors, NeuralRoom employs a differentiable renderer integrated with these geometry cues, subsequently extracting mesh via marching cubes and refining through TSDF fusion.
Experimental Evaluation
NeuralRoom demonstrates significantly improved reconstruction quality compared to traditional methods such as COLMAP and learning-based methods like Atlas and NeuralRecon. This enhancement is primarily attributed to its adept handling of texture-less areas using reliable geometric priors.
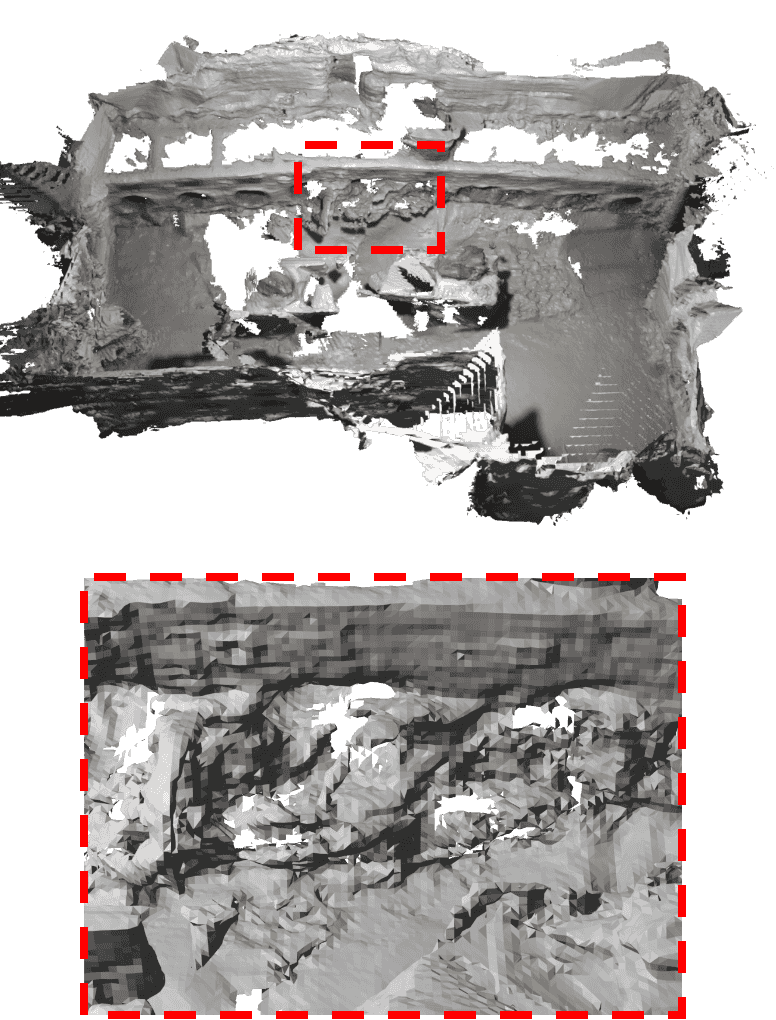
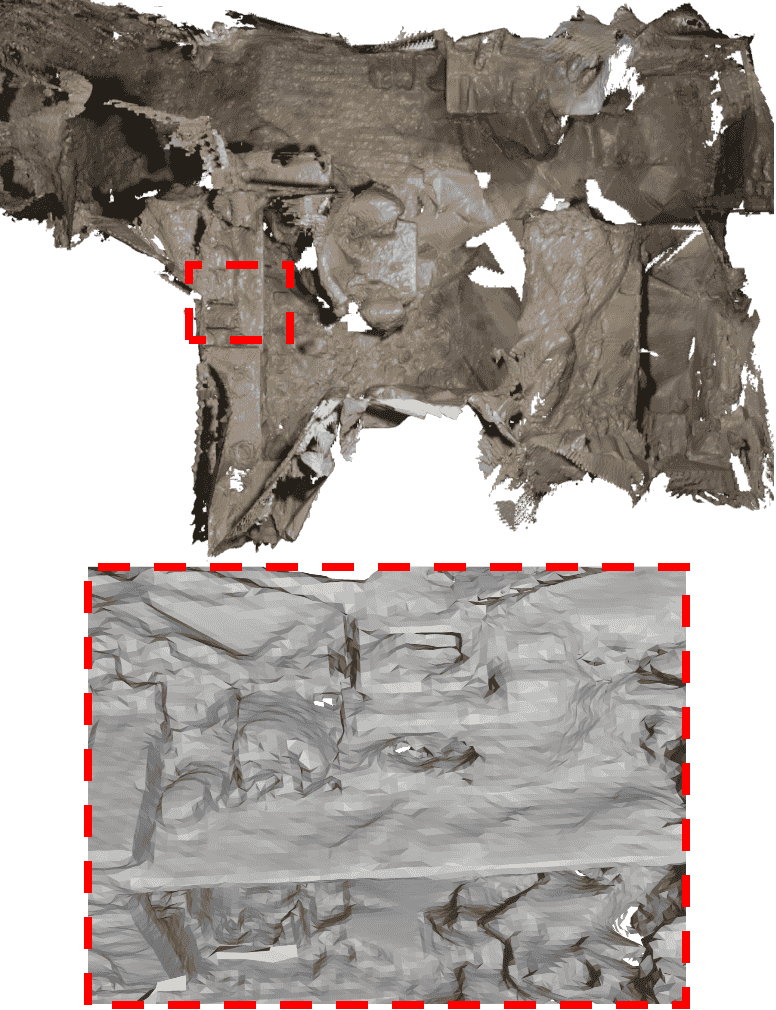
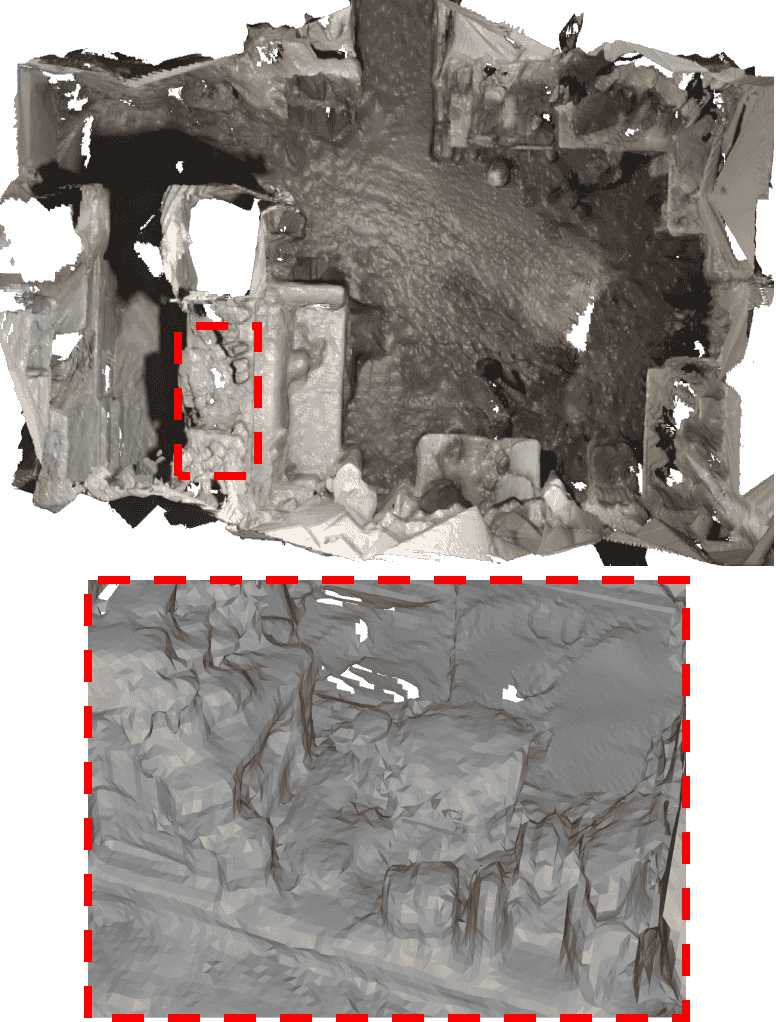
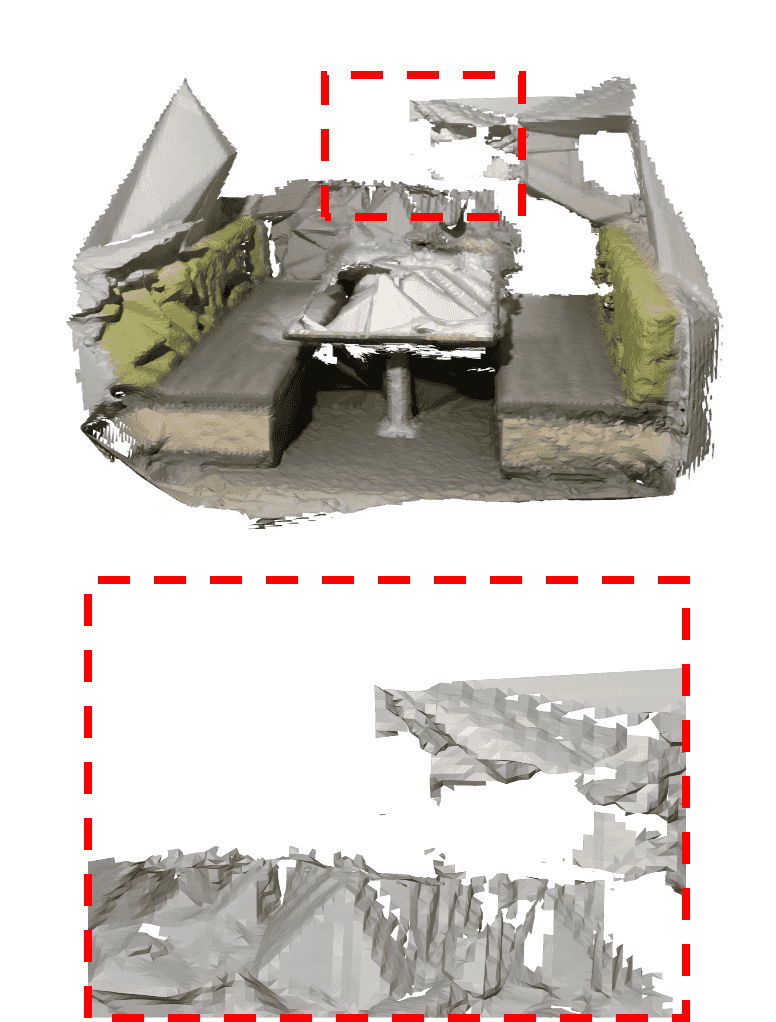
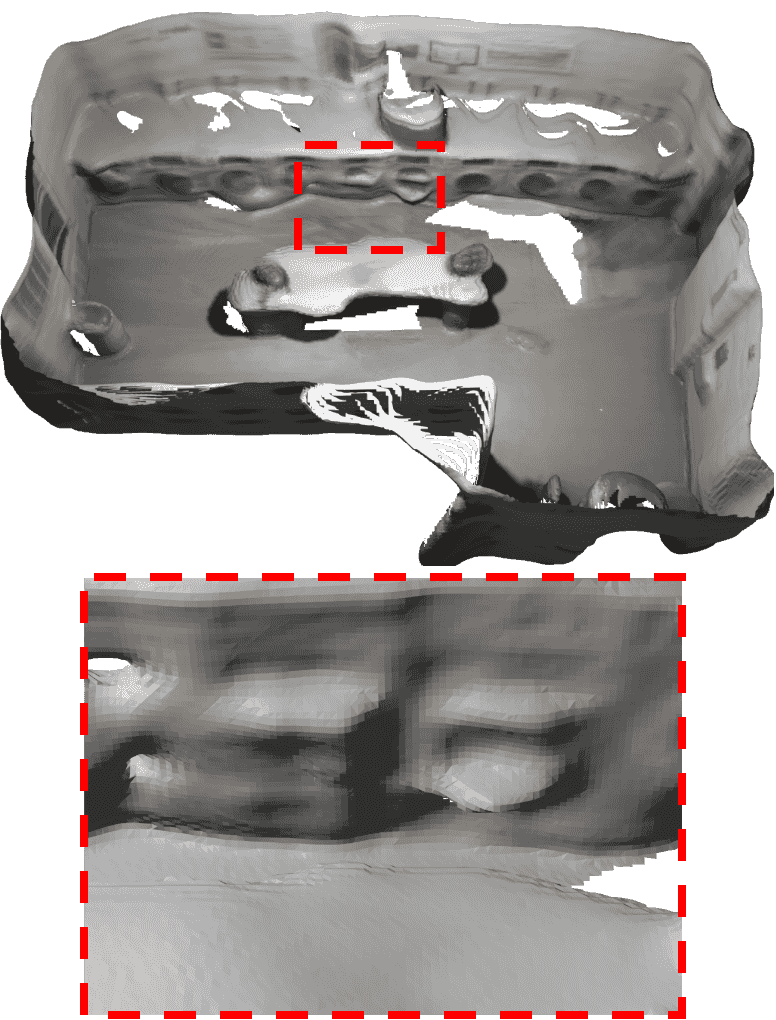
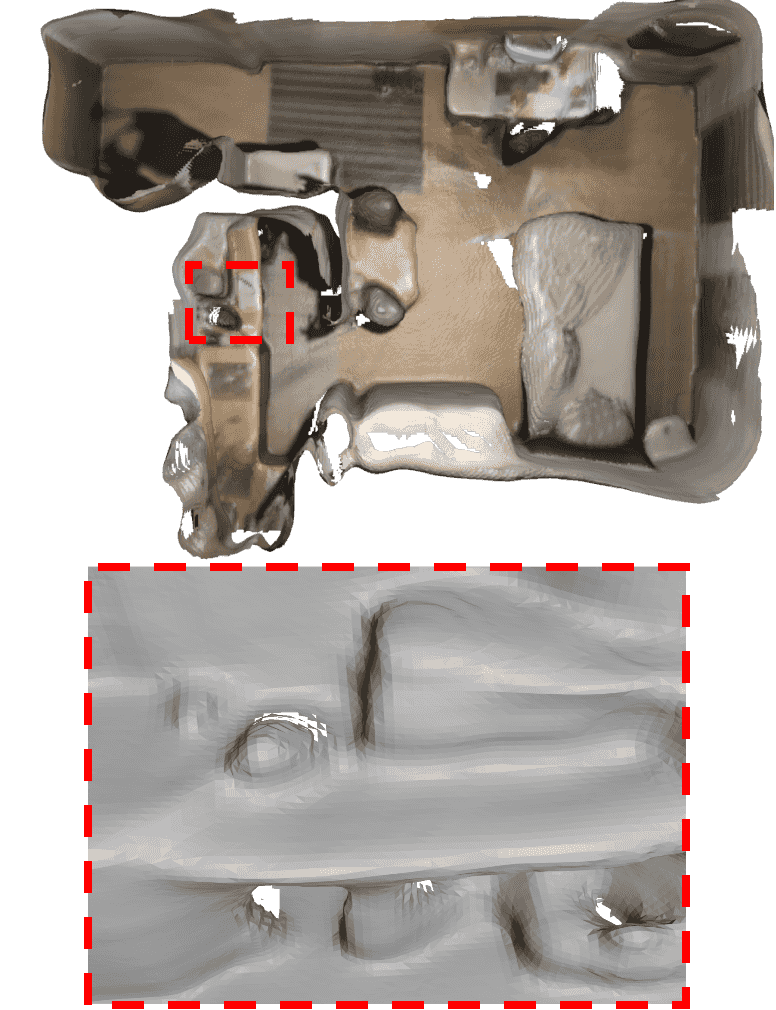
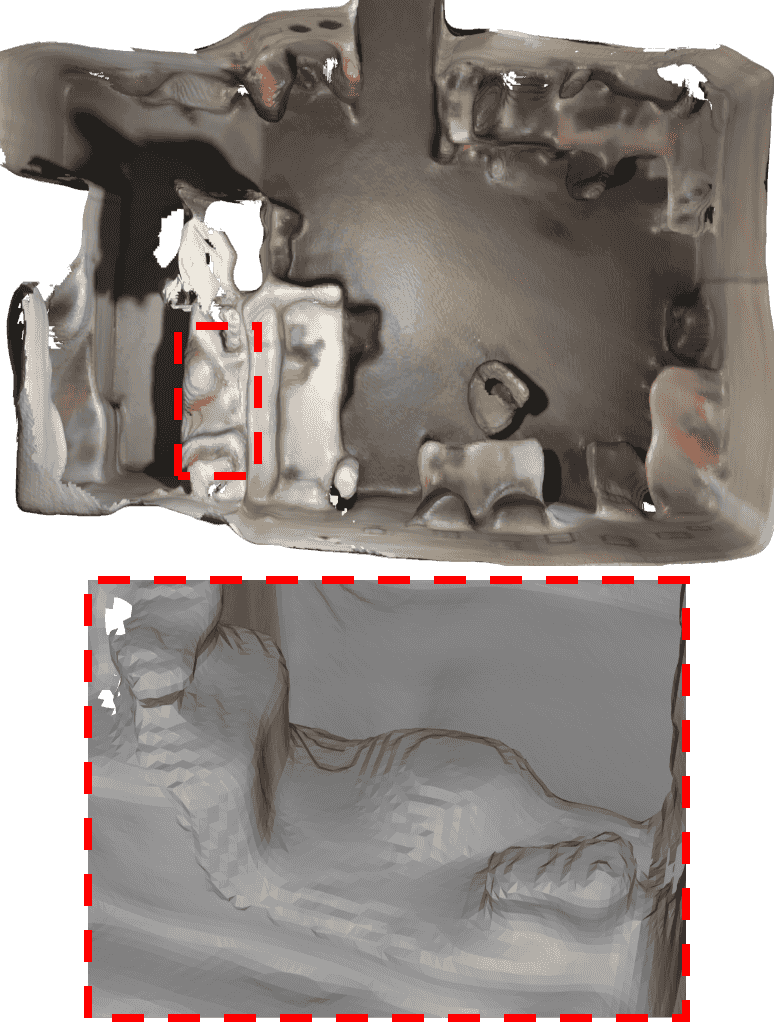
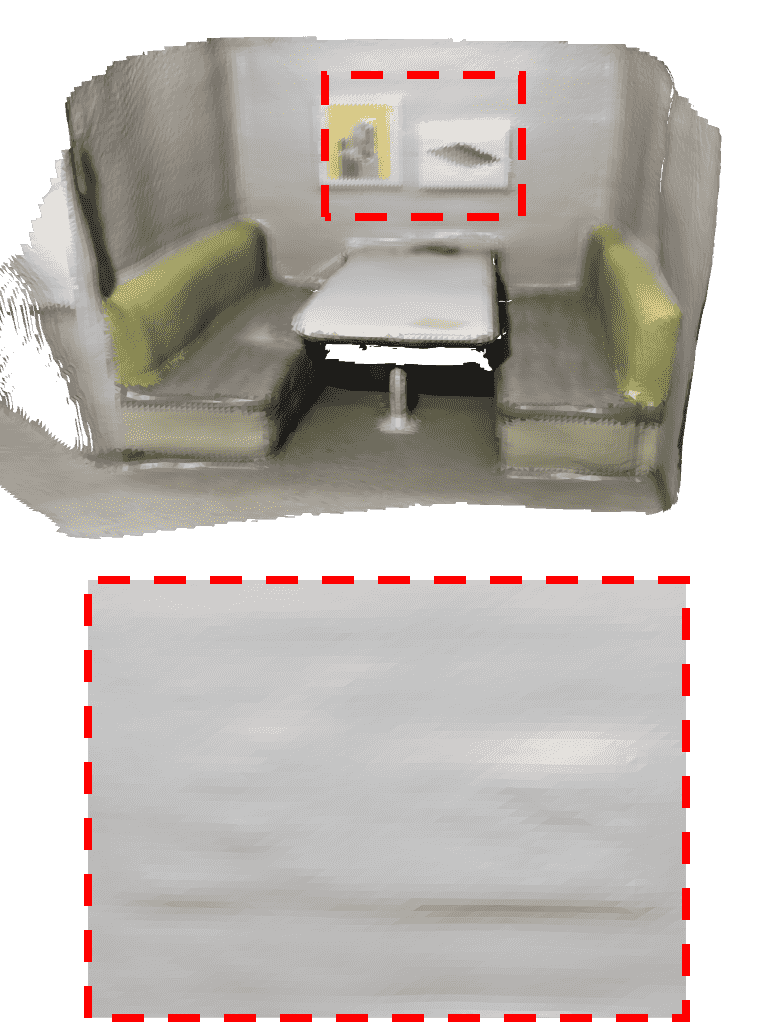
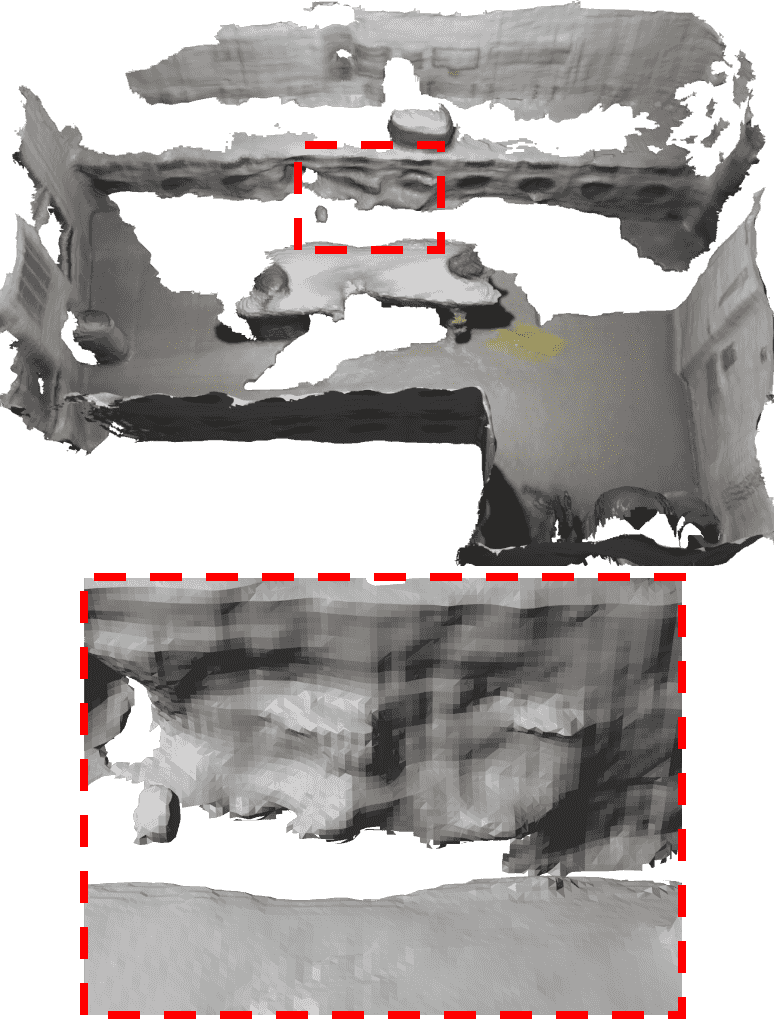
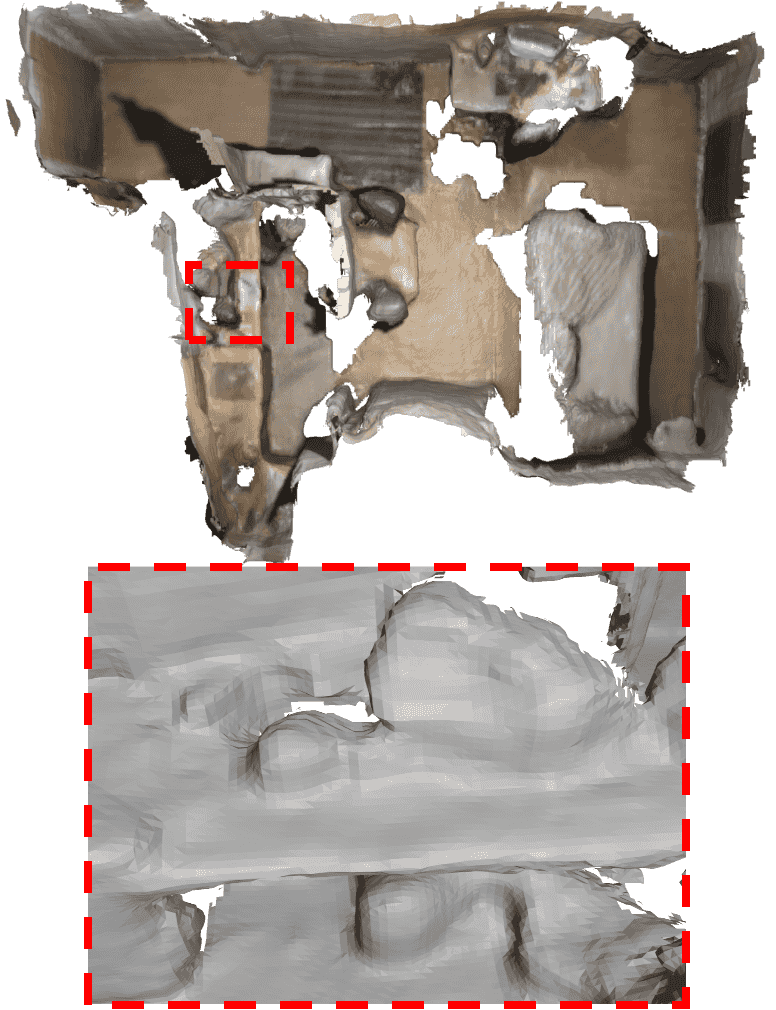
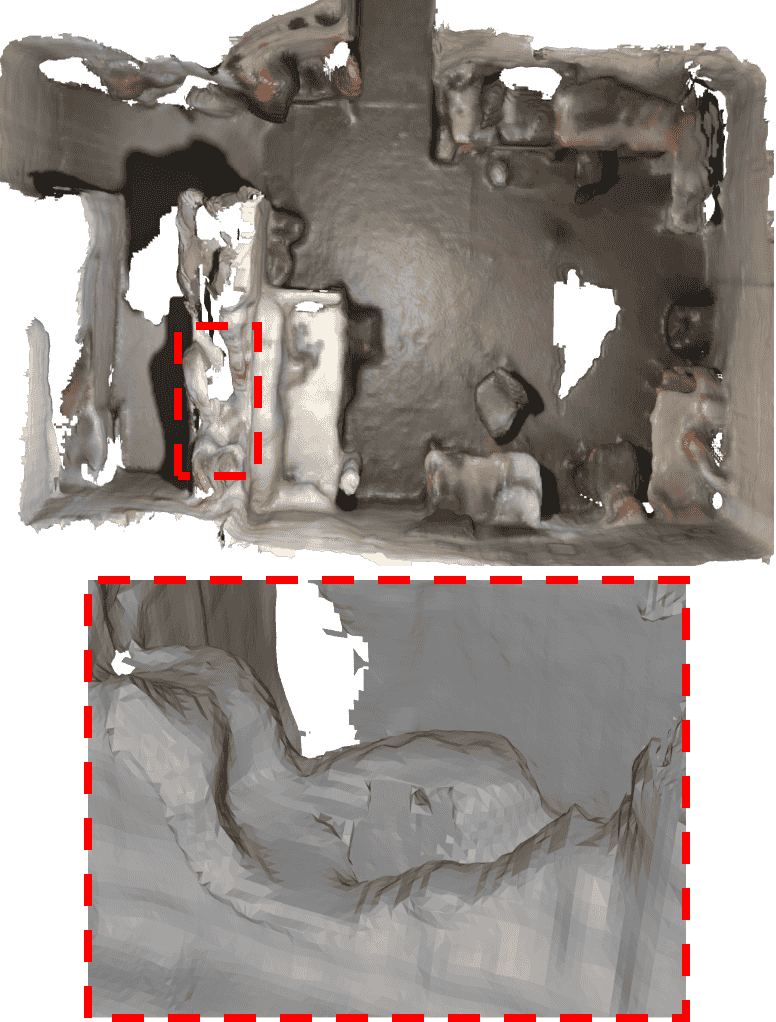
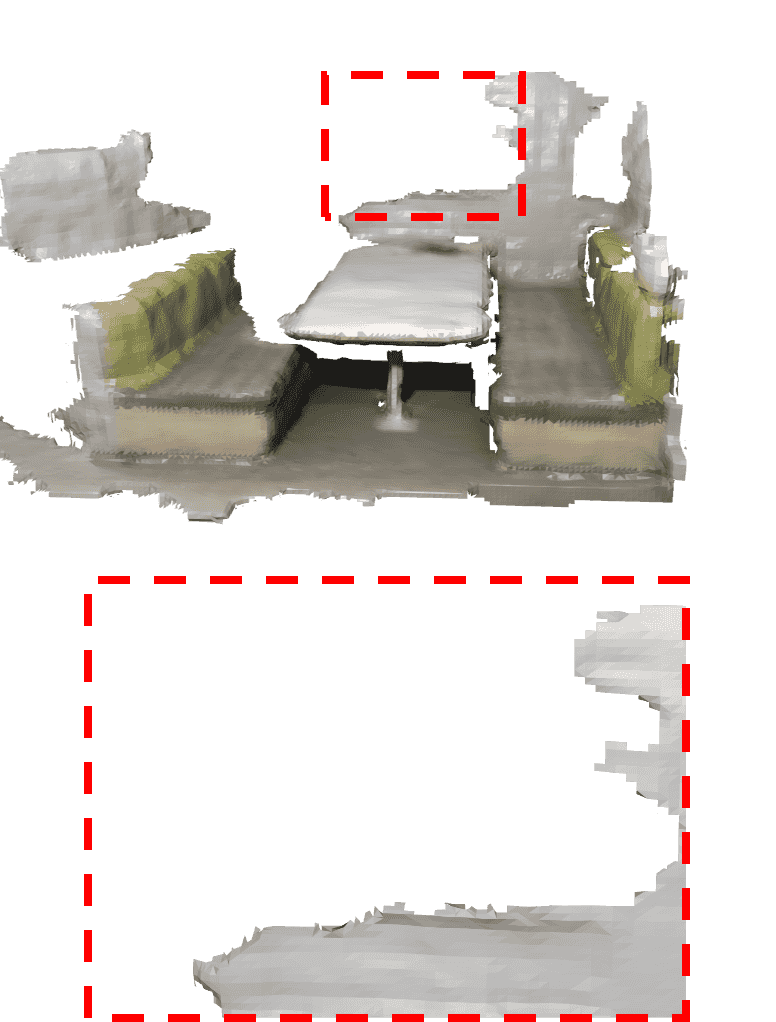
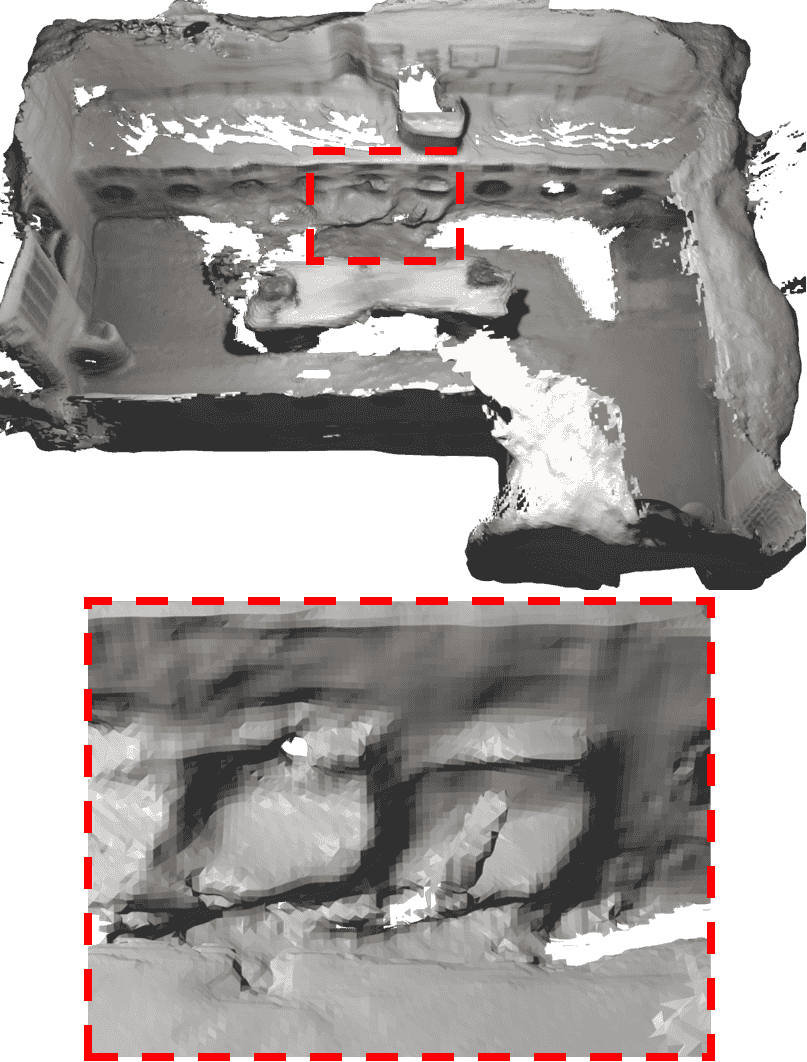
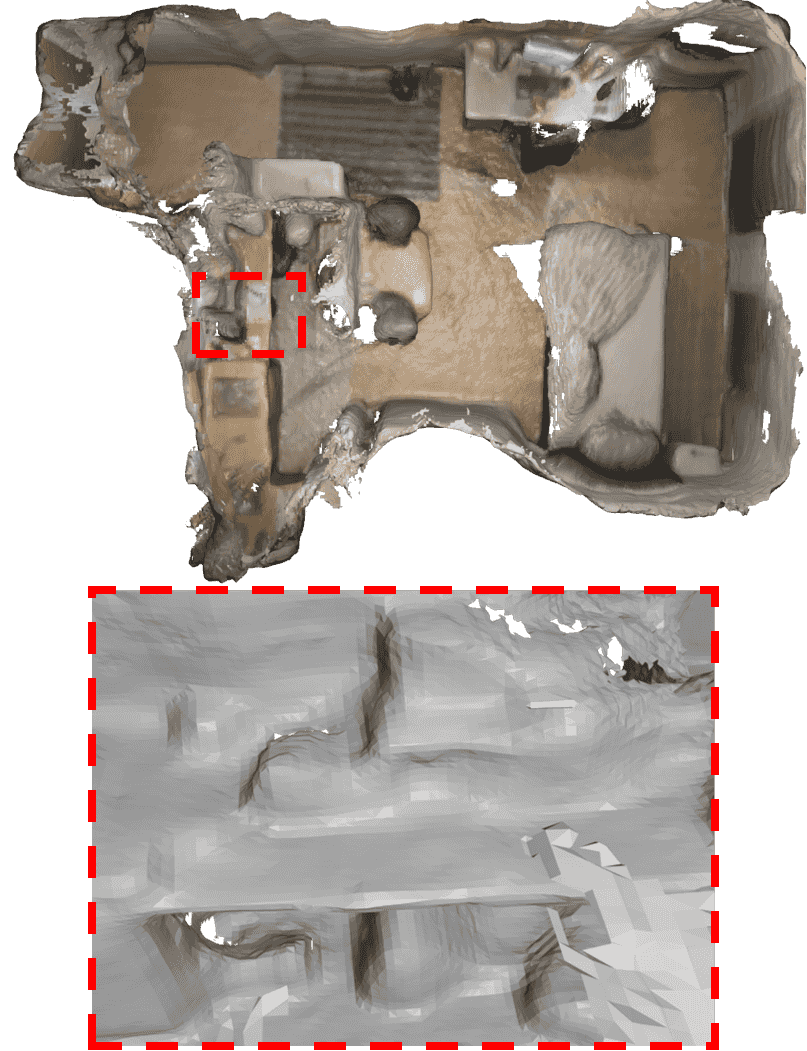
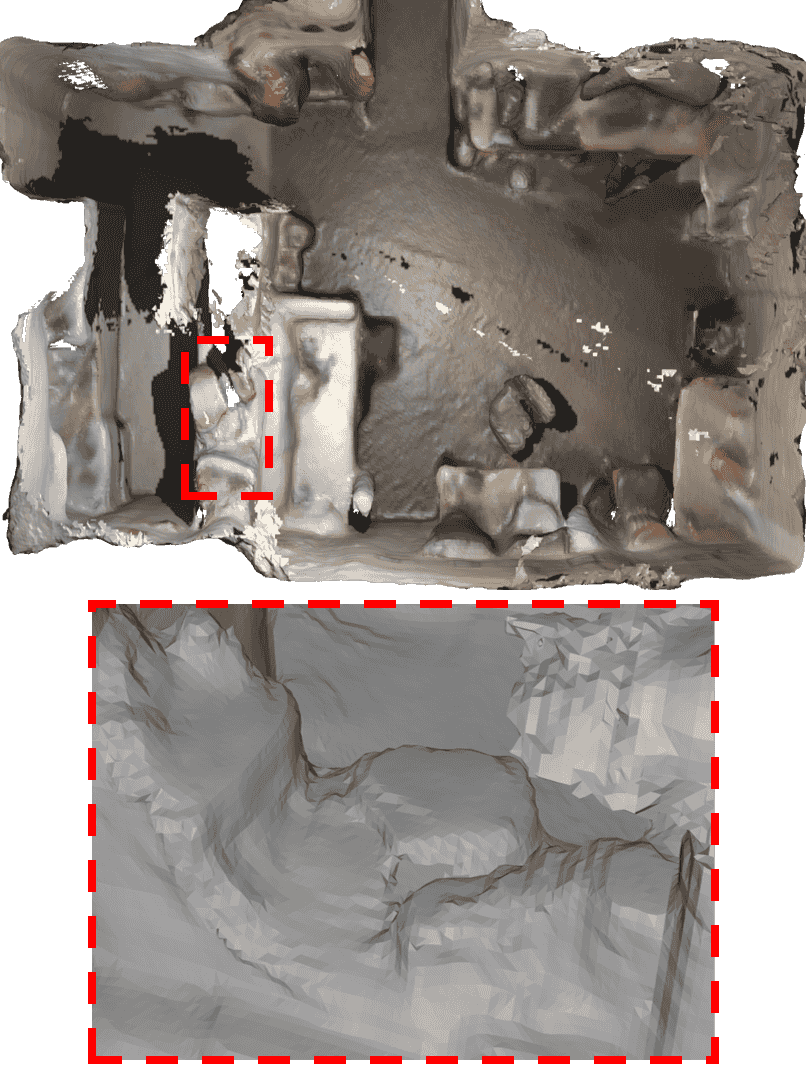
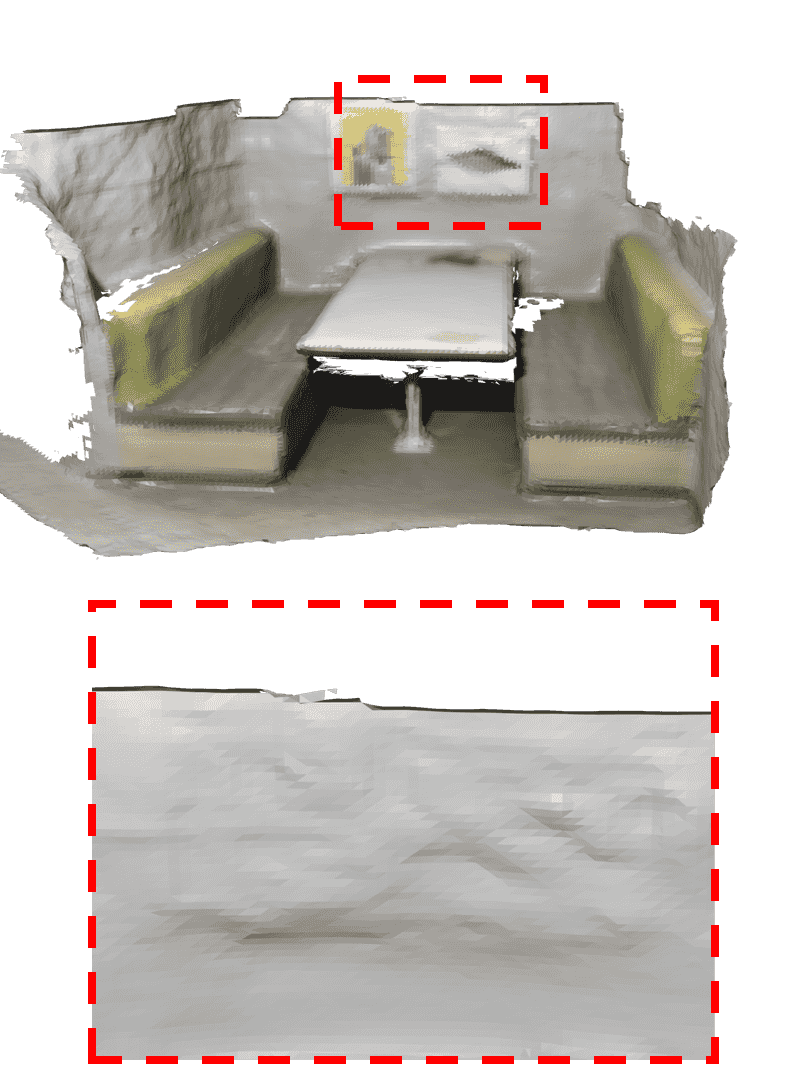
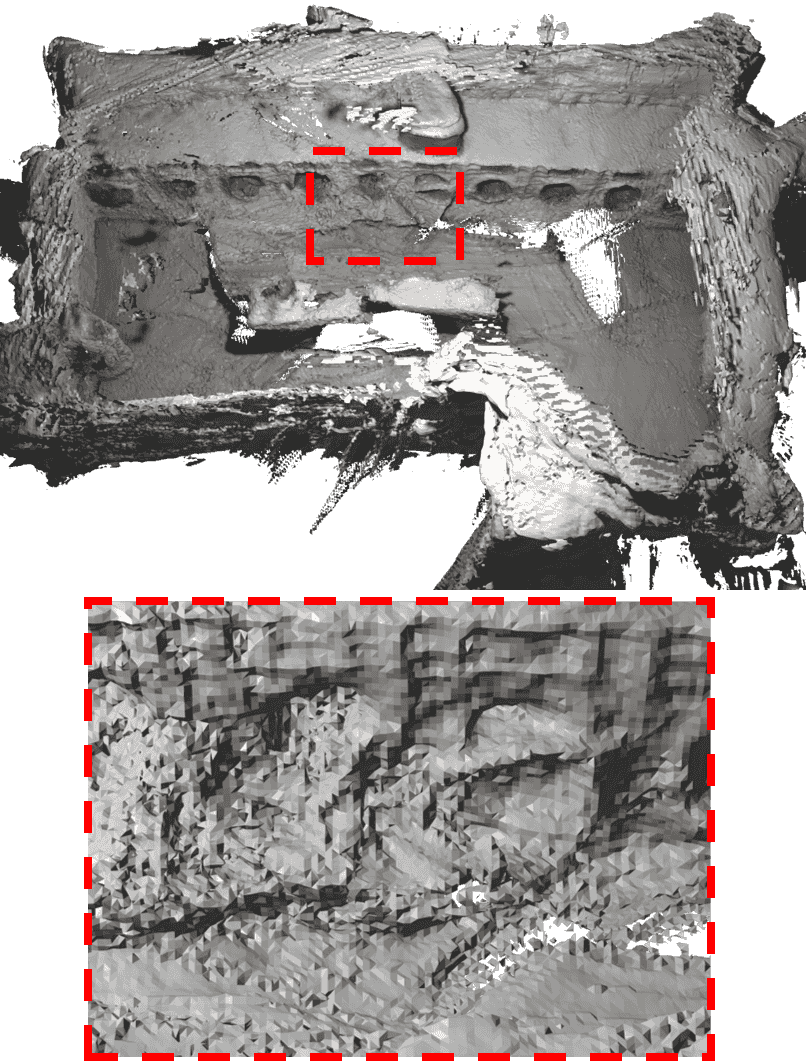
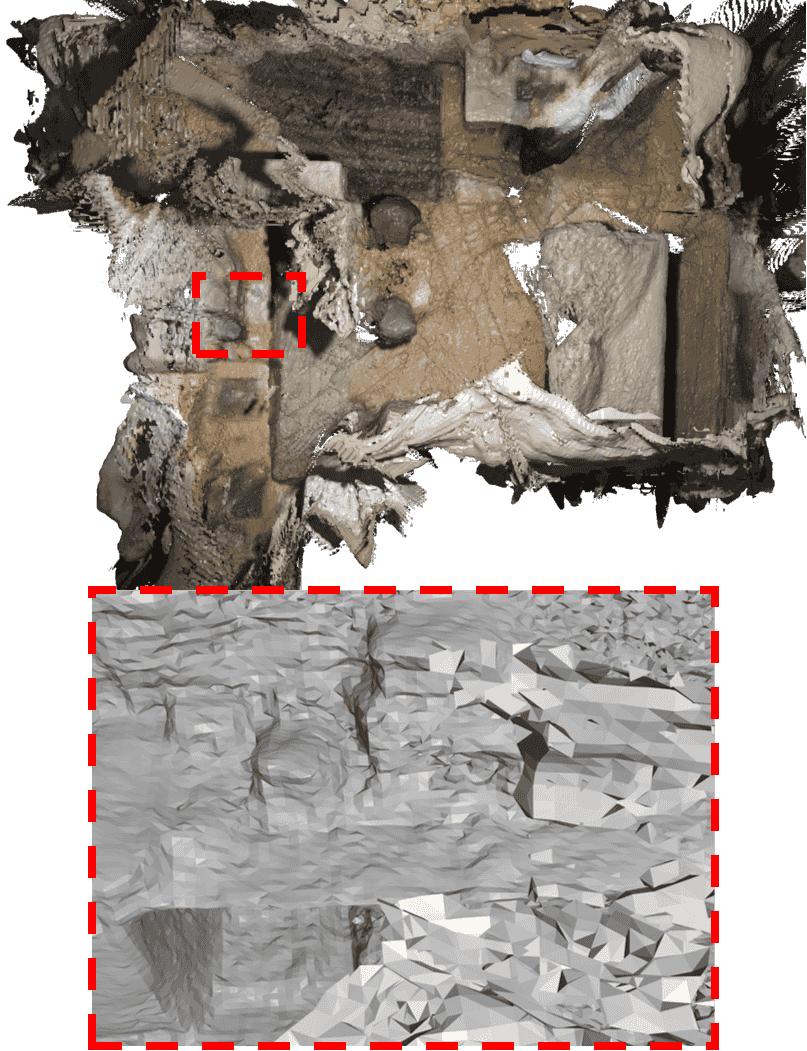
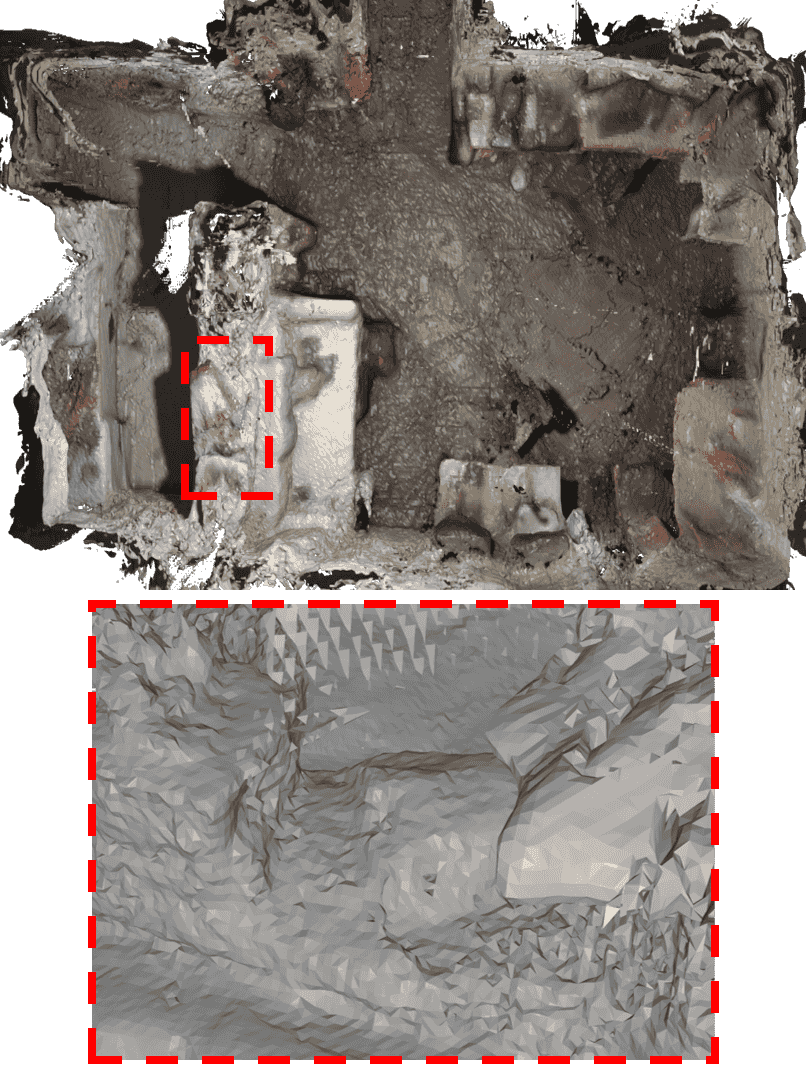
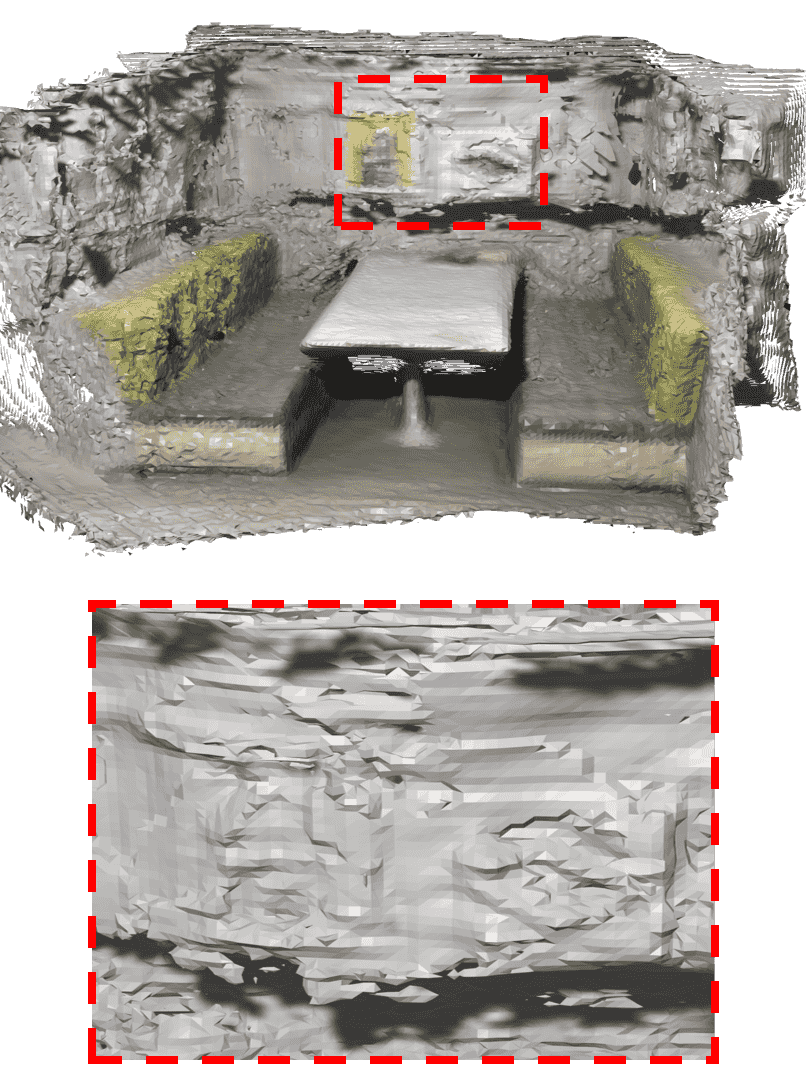
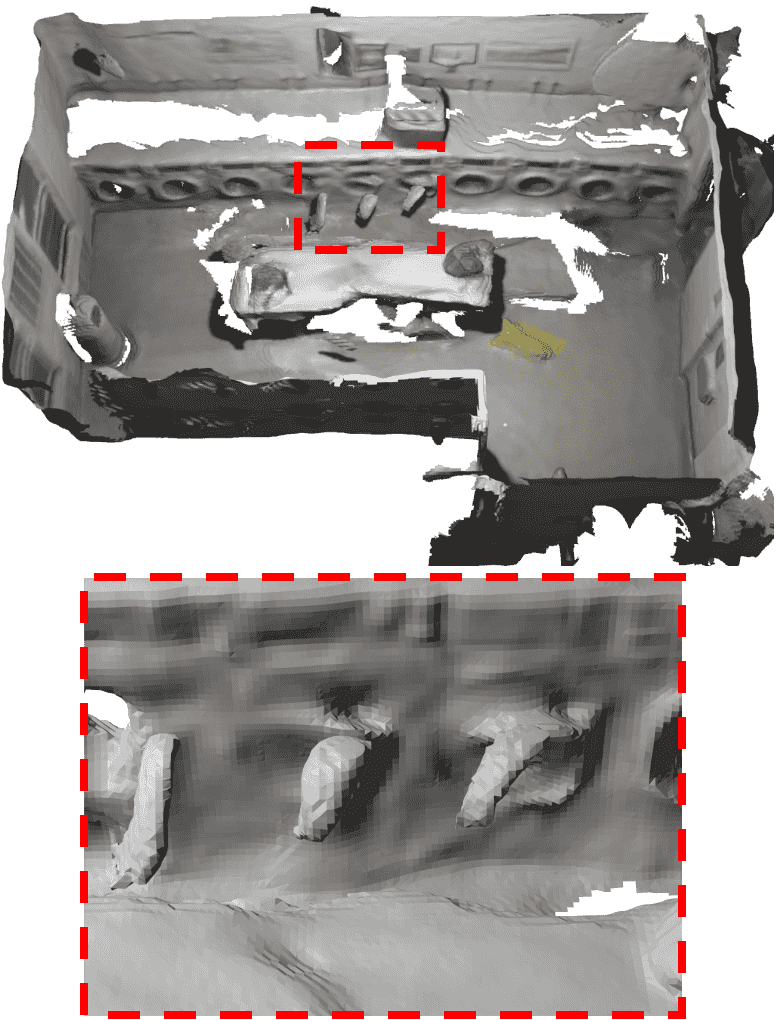
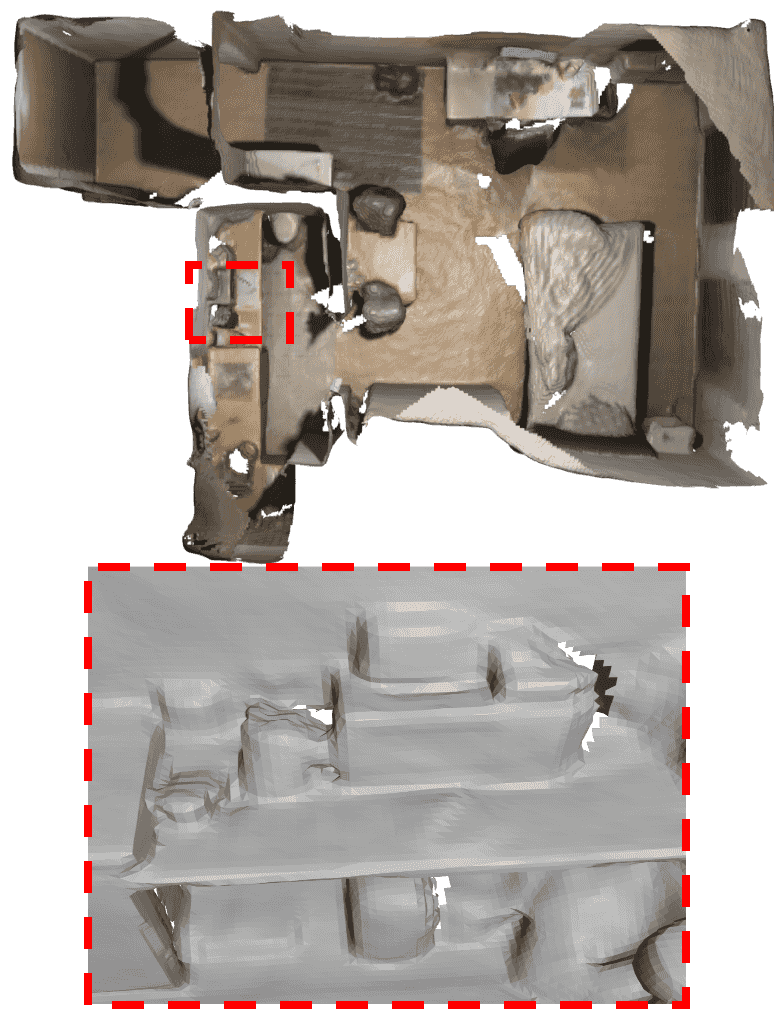
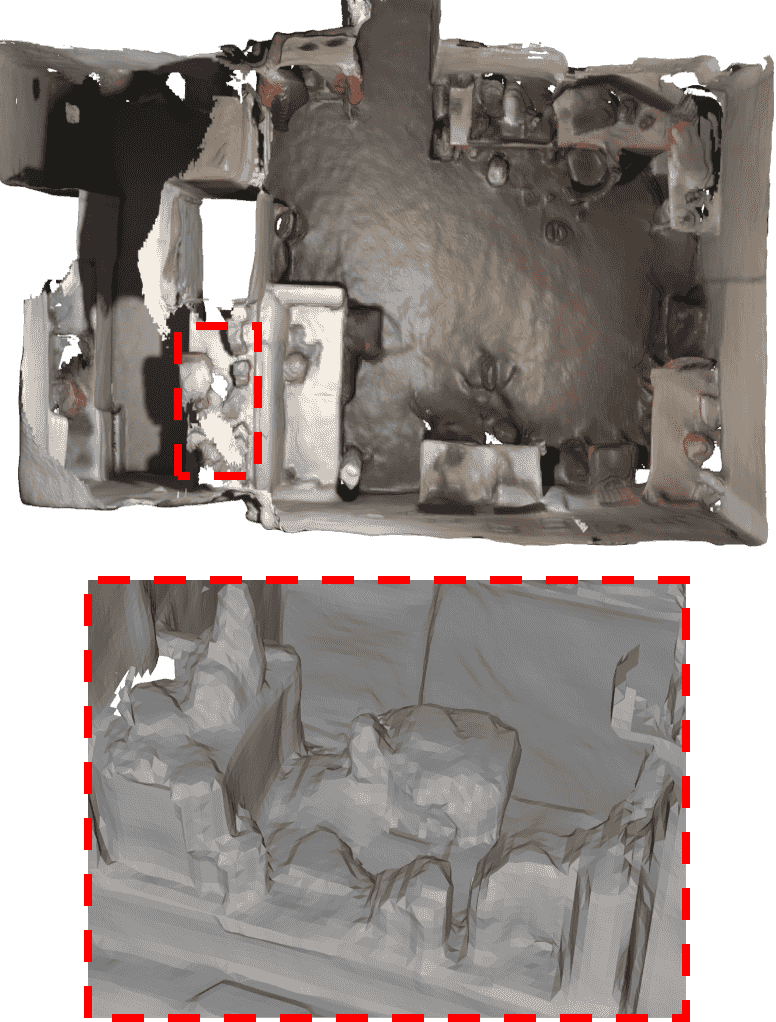
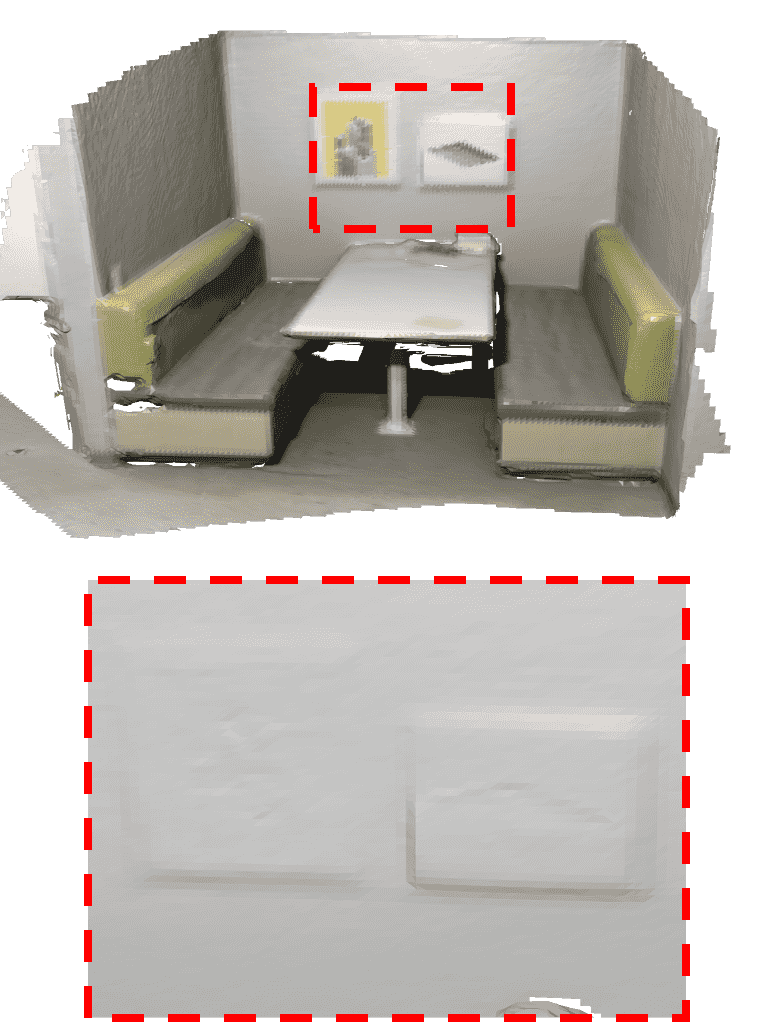
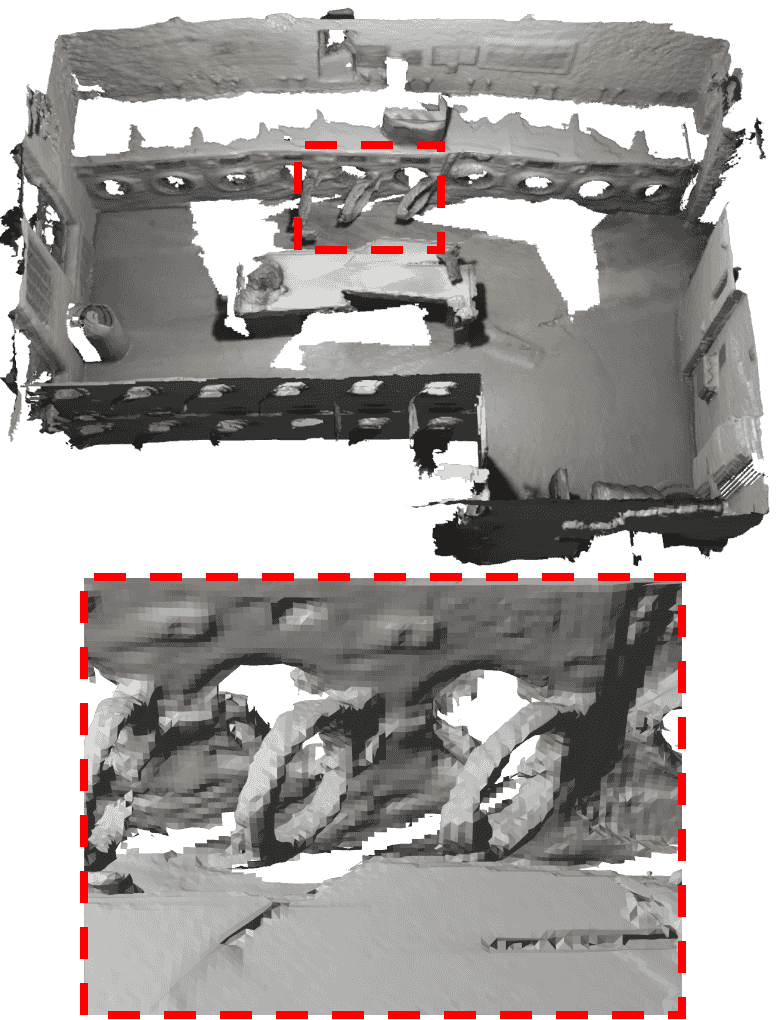
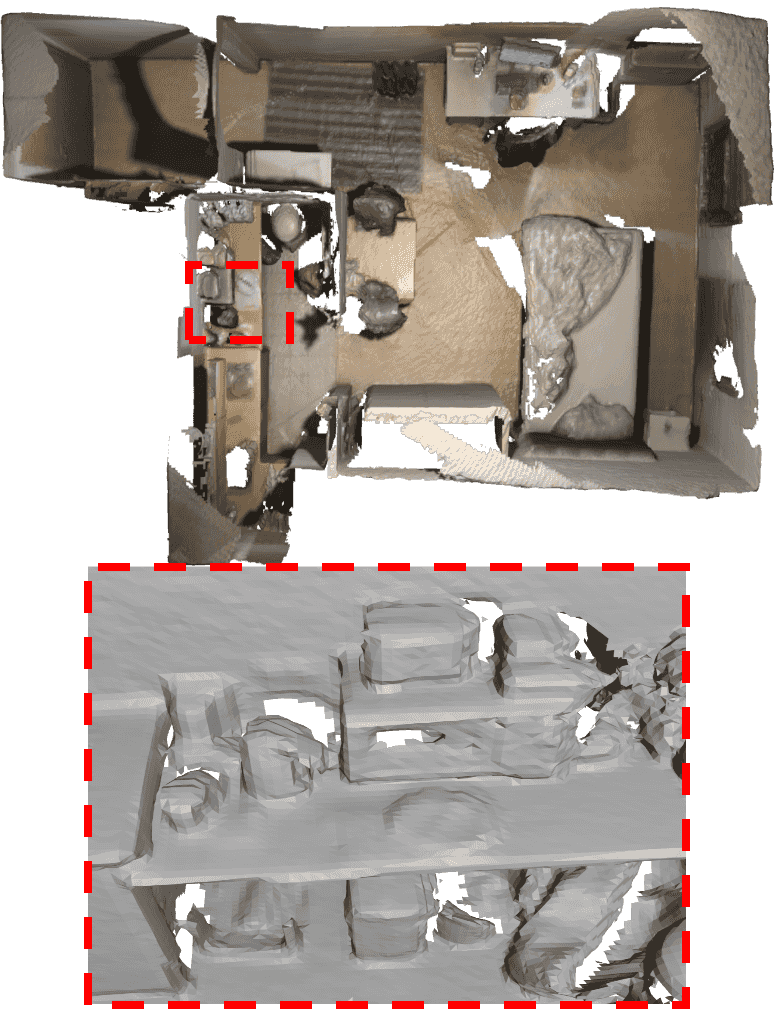
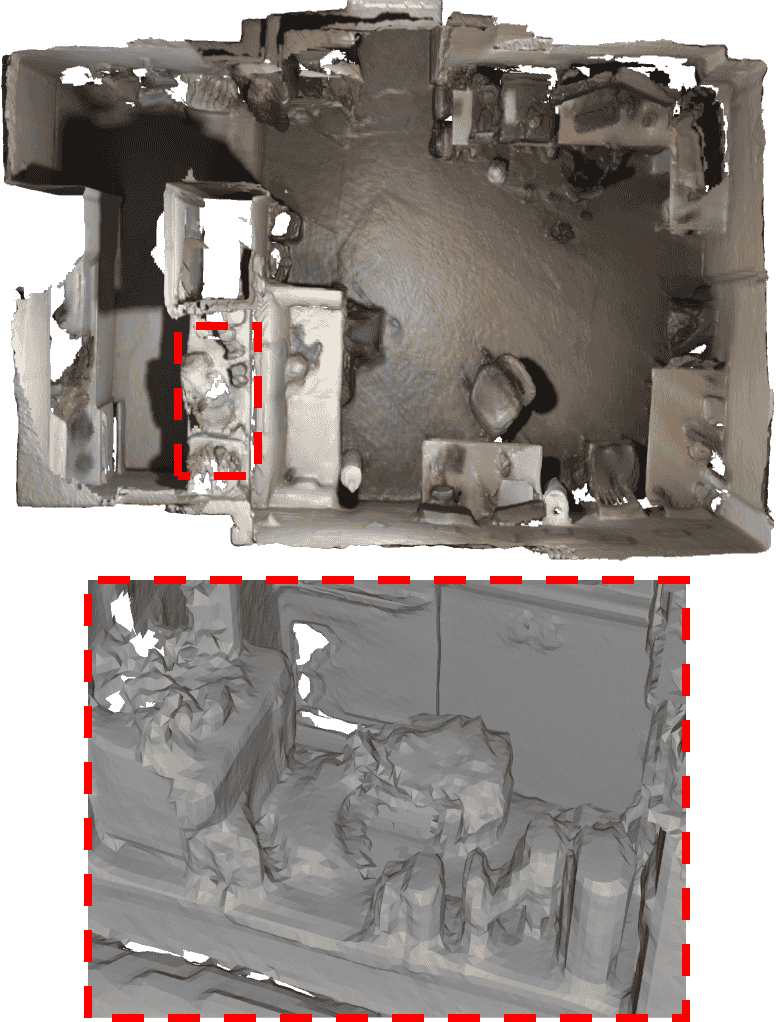
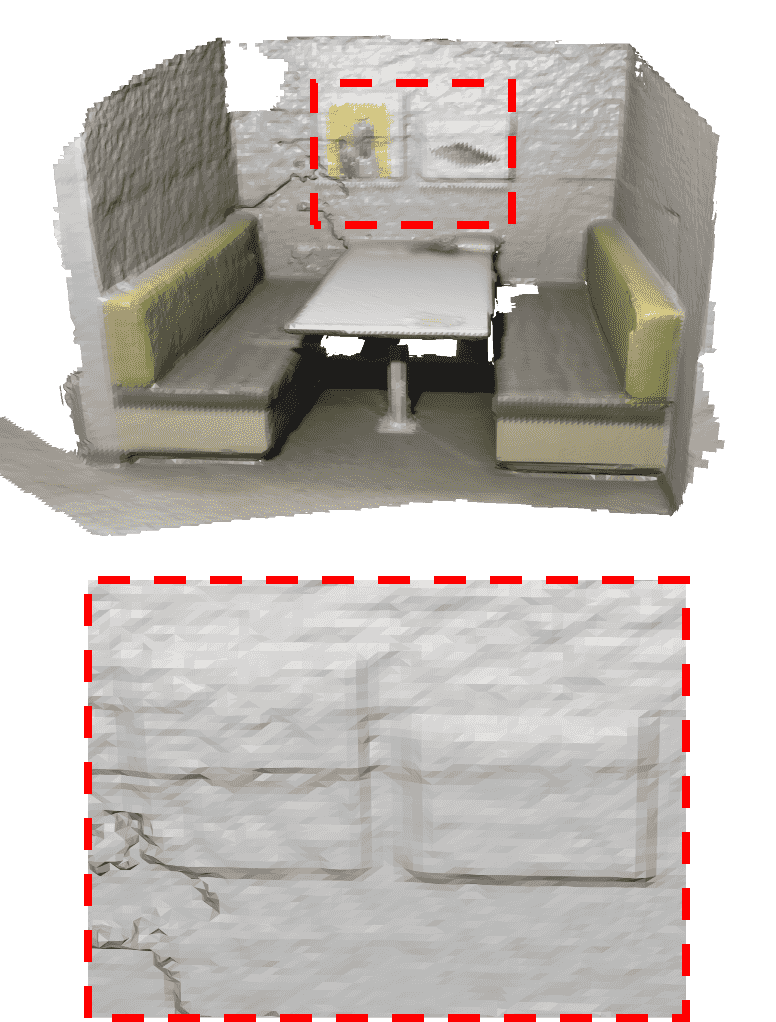
Figure 3: Visualization results on ScanNet.
Quantitatively, NeuralRoom showcases superior F-ratios and accuracy across several test scenes in the ScanNet dataset, indicating a balanced approach in terms of both completeness and detail fidelity.
Implications and Limitations
Practical Applications
The implications of NeuralRoom are profound, with potential applications spanning across VR/AR, indoor mapping for autonomous systems, and enhanced spatial fidelity for CAD models. The ability to reconstruct without relying on depth sensors further facilitates its application in environments with reflective or absorptive surfaces.
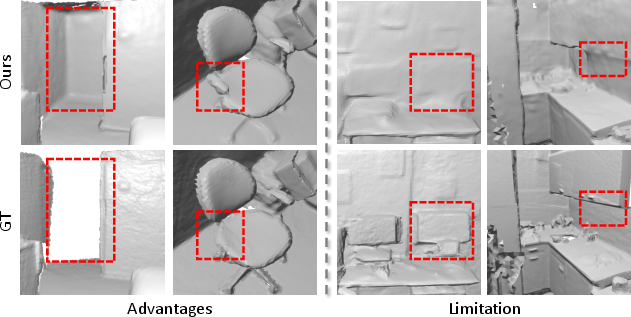
Figure 4: Advantages and limitations.
Computational Considerations
However, these benefits come at the expense of computational resources and setup reliance. The algorithm's dependency on accurate pose and prior estimates still poses constraints. Future advancements could mitigate these with more sophisticated learning-based estimation modules and efficient renderer architectures, thereby expediting and simplifying deployment processes.
Conclusion
NeuralRoom advances the field of neural surface reconstruction by integrating geometry priors into rendering processes, thereby overcoming traditional model limitations posed by texture-less indoor regions. By fostering more accurate and visually coherent reconstructions, NeuralRoom opens avenues for enhanced spatial representation and fidelity in various computer vision and graphics applications.