- The paper introduces an adaptive neural network framework ensuring UUB stability through Lyapunov-based update laws for online dynamic estimation.
- It employs three parallel MLP networks to estimate key robotic dynamic components, significantly reducing computational complexity and improving convergence rates.
- Experimental validation on a 3-DOF Phantom Omni device confirms enhanced tracking performance and robust disturbance rejection.
Adaptive Model Learning of Neural Networks with UUB Stability for Robot Dynamic Estimation
Introduction
The paper "Adaptive Model Learning of Neural Networks with UUB Stability for Robot Dynamic Estimation" presents an innovative approach to robot dynamic identification that leverages adaptive neural network structures under the Uniformly Ultimately Bounded (UUB) stability framework. This approach addresses the limitations of traditional batch algorithms in handling model mismatches and disturbances. The proposed methodology employs three parallel self-driving neural networks to estimate individual robot dynamic terms, guided by stable updating rules inspired by model reference adaptive control (MRAC).
Problem Statement
The study focuses on estimating the dynamics of complex robotic systems, which are typically difficult to model accurately due to nonlinearities and high-frequency dynamics. Using a set of modified Euler-Lagrange equations, the paper seeks to estimate dynamic terms (inertia, Coriolis, centrifugal, and gravitational forces) through excitatory inputs comprising position, velocity, and acceleration. The neural network architecture (Figure 1) aids in these estimations by deploying parallel MLP networks, each dedicated to estimating a specific dynamic component.
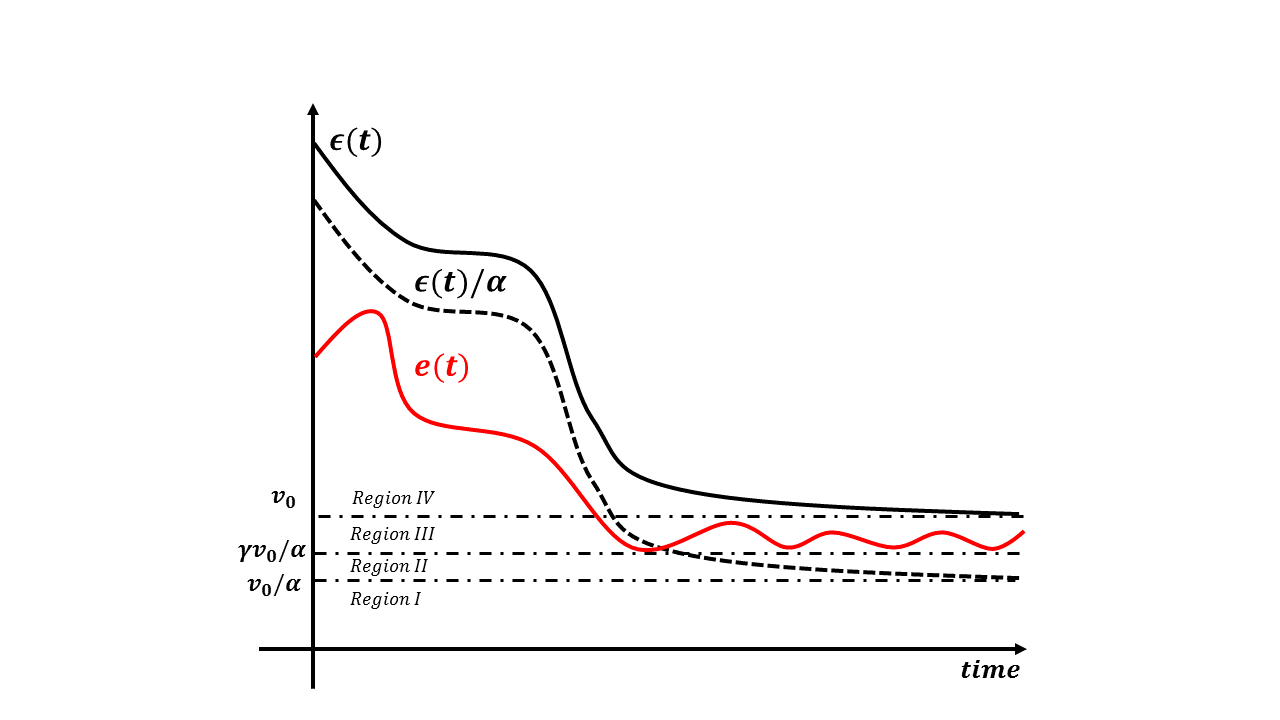
Figure 1: Proposed neural network structure.
Methodology
The methodology outlines an adaptive learning algorithm leveraging Lyapunov stability theories. The adaptive update laws for the neural networks are directly derived from Lyapunov functions, ensuring that their derivatives are negative, promoting system stability. The adaptive rules are further enhanced by robust modification techniques to counteract model mismatches and runtime disturbances.
The paper employs a multi-objective optimization problem to drive adaptive learning rules and confines the parameter space using Lyapunov-based surfaces. The errors are structured in multiple layers to facilitate parallel dynamic term estimation, while robust methods ensure parameter stability and avoid drifts.
Experimental Validation
The proposed model was validated on a 3-DOF Phantom Omni Haptic device, demonstrating the approach's efficacy in real-world robotic applications. The experimental setup involved an online data-driven identification process, which quickly adjusted the network to converge toward the true dynamics of the system. The experimental results highlighted the network's ability to maintain tracking performance even under parameter perturbations.
Discussion
The detailed exploration of tuning parameters, such as α for error convergence speed and γ for stability margins, revealed their significant impact on system performance. Notably, the proposed adaptive network achieved a significant reduction in computational complexity and improved convergence rates compared to traditional methodologies. The application of this adaptive network within an indirect adaptive control scheme for a serial manipulator demonstrated superior tracking capabilities and control efforts compared to a conventional PD controller.
Conclusion
This study presents a robust framework for online dynamic estimation using adaptive neural networks. By ensuring UUB stability and implementing effective learning rules, the proposed approach stands out for its potential applications in a wide array of identification and control problems in robotics. The emphasis on stability and efficiency makes this approach particularly suitable for complex, real-world robotic systems, where adaptability and precision are paramount. Future considerations may involve expanding the framework's adaptability to different robotic architectures and operational conditions.