- The paper proposes a distributed V2X algorithm (AROW) that resolves crossing ambiguities among connected and autonomous vehicles at stop-controlled intersections.
- Methodology involves a multi-stage process including discovery, arbitrator selection, turn assignment, and handling non-compliance, tested via SUMO simulations.
- Results demonstrate significant improvements in ambiguity reduction and clearance times compared to delay-based and traffic signal systems, ensuring enhanced safety and fairness.
AROW: V2X-Based Automated Right-of-Way Algorithm for Cooperative Intersection Management
The presented paper introduces AROW, a V2X-based automated right-of-way algorithm designed for cooperative intersection management (CIM), specifically targeting stop-controlled intersections (SC-Is). This algorithm aims to reduce ambiguity in crossing priorities among connected and/or autonomous vehicles (CAVs) arriving at intersections simultaneously, ensuring safer and more efficient traffic flow. This essay provides an in-depth exploration of the algorithm's functionality, implementation, and performance indicators.
Introduction to Cooperative Intersection Management
Intersections pose significant challenges to traffic safety and efficiency. In the context of the US National Motor Vehicle Causation Survey, intersections contribute to a considerable proportion of traffic incidents, with a remarkable portion attributed to priority ambiguities. CIM systems utilizing V2X communication have been explored to manage such issues. Unlike signalized intersections, SC-Is, dominated by stop signs rather than traffic lights, are particularly prone to ambiguity-induced accidents. The AROW algorithm prioritizes resolving these ambiguities by implementing a distributed arbitration mechanism where CAVs negotiate crossing priorities through V2X communications.
AROW Algorithm Overview
AROW is developed to provide an explicit assignment of crossing turns to CAVs at SC-Is through a series of Driver Intention Messages (DIMs). By implementing the distributed Nature, AROW allows for the negotiation of crossing priorities without reliance on Road-Side Units (RSUs), overcoming the limitations of centralized systems like high costs and scalability issues. This method is also suitable for mixed traffic scenarios, accommodating both autonomous and human-operated vehicles.
Algorithm Stages and Communication Protocol:
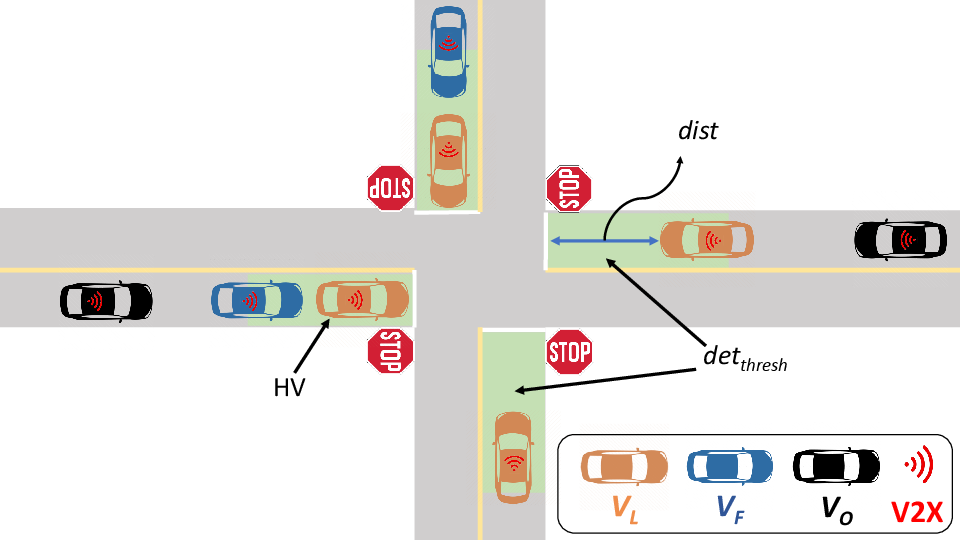
- SC-I Discovery (Stage 1):
- CAVs broadcast introductory messages upon entering the SC-I detection zone.
- The algorithm identifies competing vehicles in the SC-I scenario.
- Arbitrator Selection (Stage 2_1 and 2_2):
- A single arbitrator (
v_{arb}) is elected among competing CAVs based on a heuristic involving the order of arrival or specific identifiers.
- Turn Assignment (Stage 3_1 and 3_2):
- The arbitrator schedules crossing turns for all involved CAVs using predefined heuristics.
- Crossing Execution (Stage 4_1):
- Vehicles abide by assigned turns, thereby reducing ambiguity and enhancing safety.
- Handling Non-Compliance:
The implementation of AROW is tested using SUMO (Simulation of Urban Mobility) to examine its performance in various traffic density scenarios. The results focus on metrics such as ambiguity reduction, vehicle clearance time, and handling of non-compliance.
- Ambiguity Mitigation: AROW demonstrates a significant reduction in ambiguity instances (
n_{amb}), as vehicles receive clear crossing instructions, unlike traditional allway or delay-based methodologies.
- Fairness and Efficiency: The algorithm shows improvements in clearing intersections (measured as
T_{clearance}), making traffic management at SC-Is more equitable and timely across different traffic densities.
- Non-Compliance Handling: The algorithm robustly handles non-compliant behavior by incorporating a mechanism that allows compliant vehicles to override repeated arbitration, thereby maintaining flow and safety.
Comparative Analysis
- Against Delay-Based CIM (DCIM): DCIM shows limitations in adapting to mixed or high-density traffic conditions, leading to longer clearance times and higher ambiguity. AROW maintains efficient operation without compromising fairness.
- Traffic Signal Baseline Comparison: While traffic lights ensure systematic clearing, they result in longer clearance times compared to AROW in non-compliance situations. AROW's dynamic negotiation offers a responsive system tailored to real-time traffic conditions.
Conclusion
AROW offers a robust and scalable solution for managing CAV dynamics at unsignalized intersections, mitigating the risks associated with priority ambiguity and enhancing intersection performance. The algorithm's design accommodates mixed-traffic realities and is adaptable to varying levels of automation within vehicular networks.
Future Directions: Further enhancements could involve real-world testing under diverse network conditions, integrating emergency vehicle prioritization, and optimizing time-out parameters based on latency analyses for different V2X technologies. Such developments will further refine the applicability and efficacy of AROW in practical settings.