- The paper introduces a novel framework that fuses transformer-based 3D shape prediction with NBV planning for improved reconstruction accuracy.
- It achieves a 25.46% increase in object surface coverage over traditional methods, demonstrating significant efficiency gains.
- Real-world LiDAR tests and simulation (AirSim) validate the system's robustness and practical potential in autonomous exploration.
An Overview of "Pred-NBV: Prediction-guided Next-Best-View for 3D Object Reconstruction"
The paper "Pred-NBV: Prediction-guided Next-Best-View for 3D Object Reconstruction" presents a novel framework combining a 3D shape prediction model with a next-best-view (NBV) planner to enhance the efficiency and accuracy of 3D object reconstruction by autonomous robots. The main aim is to overcome existing limitations in NBV planning for 3D object reconstruction by integrating prediction-guided exploration strategies. Below is a detailed summary and analysis of the proposed methodology and its impacts.
Prediction-Guided Next-Best-View Planning
The Pred-NBV approach incorporates deep learning advancements into NBV planning, targeting real-world 3D object reconstruction scenarios. The central innovation in this paper is the integration of predictive modeling to guide the exploration and observation strategies of robotic systems. The work outlines two key components: PoinTr-C, an improved 3D shape prediction module, and a novel NBV planner that leverages predictive information.
PoinTr-C: Enhanced Prediction Model
PoinTr-C is a transformer-based 3D point cloud completion network, fine-tuned with a curriculum learning strategy. This approach allows the network to handle perturbations in rotation and scale without relying on the implicit canonical orientation and centering of the object. The fine-tuning includes various transformations to ensure robustness across diverse orientations, which makes PoinTr-C adaptable to real-world scenarios where such assumptions typically falter.
NBV Planner
The NBV planner is designed to optimize both geometric coverage and efficiency of exploration. It uses the predictions from PoinTr-C to generate candidate viewpoints and selects the one maximizing information gain while minimizing movement costs. The planner calculates the anticipated coverage from these candidate views by projecting the reconstructed 3D model, thus selecting the most informative viewpoint.
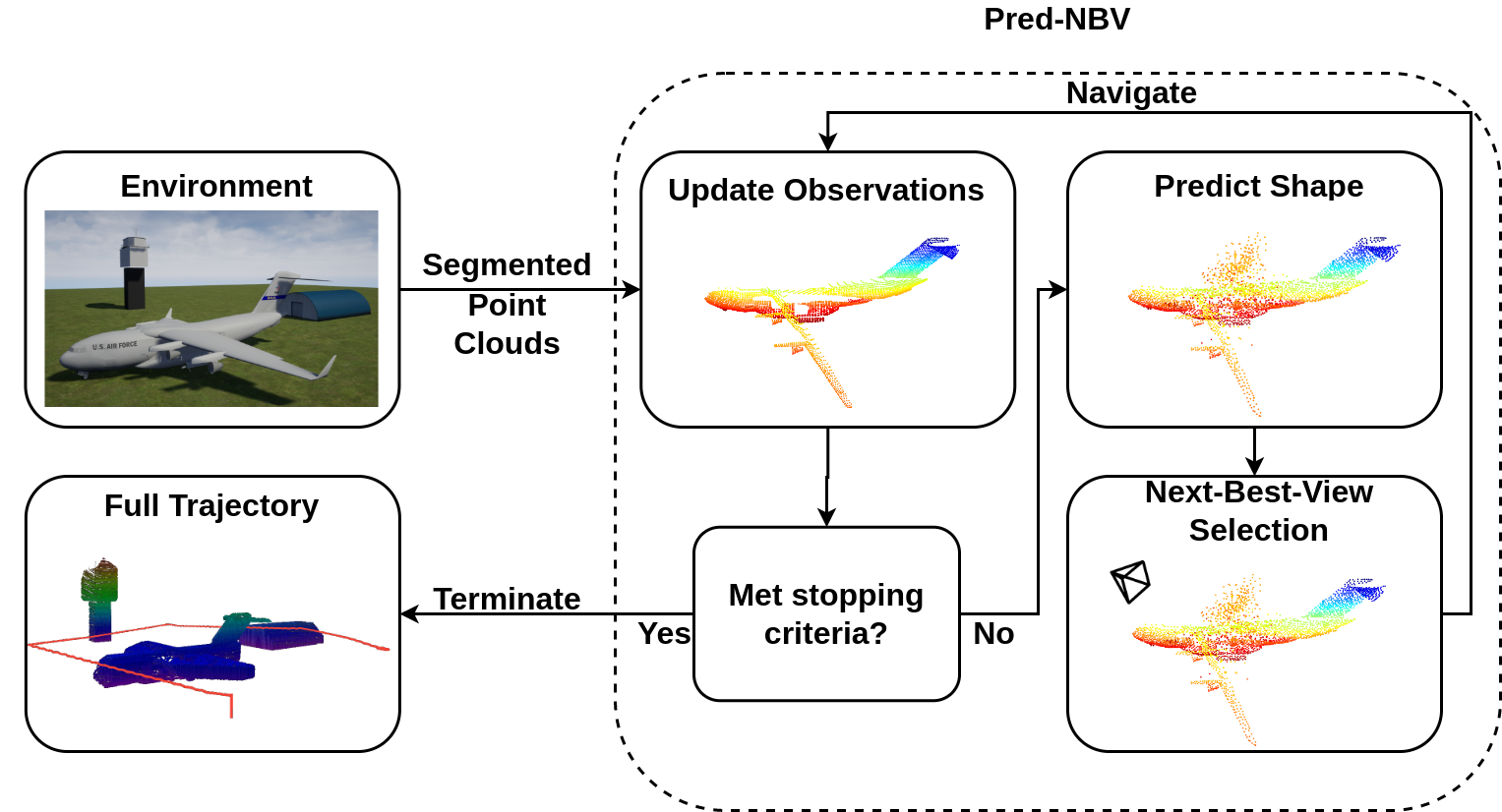
Figure 1: Overview of the proposed approach.
Implementation and Results
Simulation and Real-World Deployment
The Pred-NBV system is evaluated both in simulation (AirSim) and with real-world LiDAR data. The simulation results demonstrate significant improvements in coverage efficiency when compared to baseline methods. Specifically, Pred-NBV achieves, on average, 25.46% more object surface coverage compared to traditional approaches under equivalent exploration budgets.
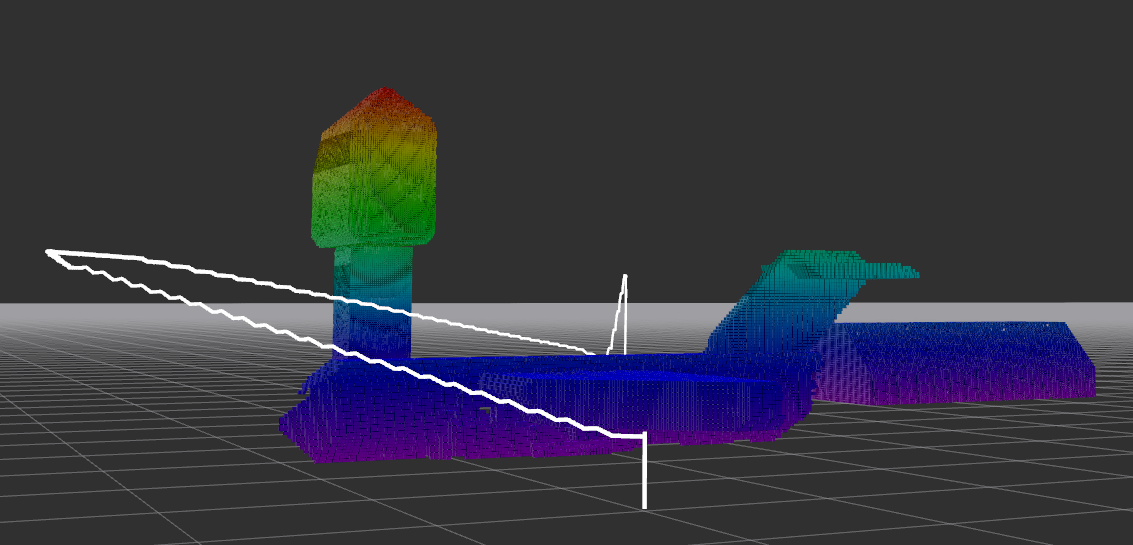
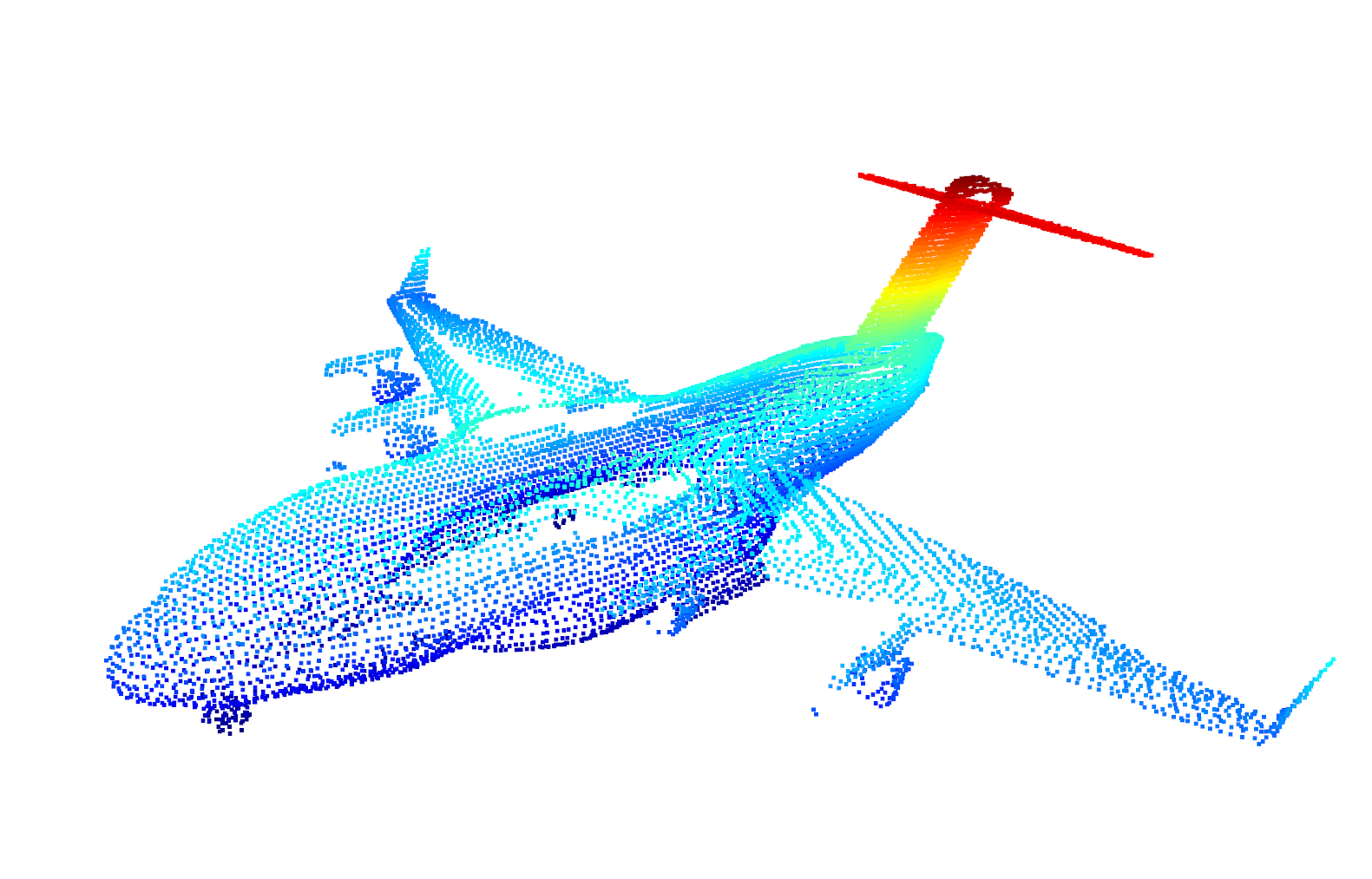
Figure 2: Flight path and total observations of C17 Airplane after running our NBV planner in AirSim simulation.
Real-World Point Cloud Data
To evaluate performance on real-world data, the authors conduct tests using LiDAR measurements. The results indicate that PoinTr-C successfully reconstructs realistic object shapes even from partial observations, confirming the model's robustness and applicability beyond synthetic datasets.
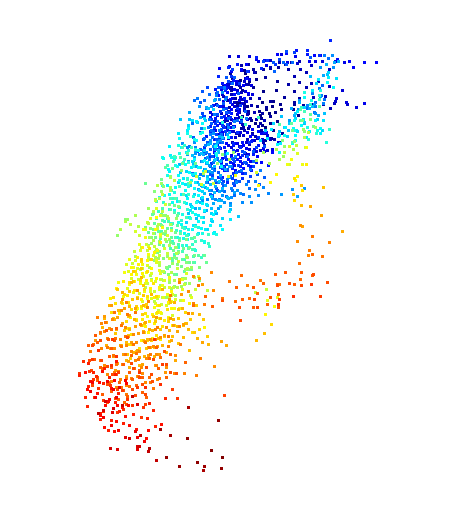
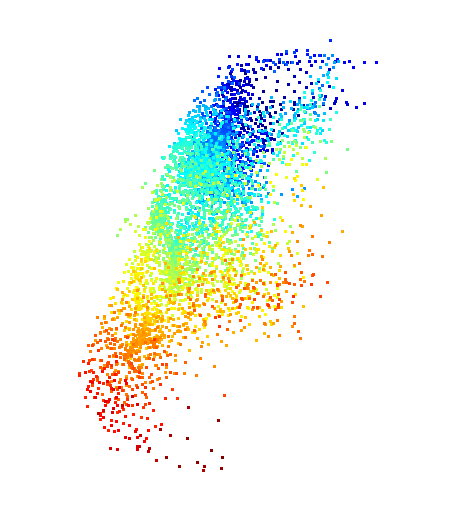
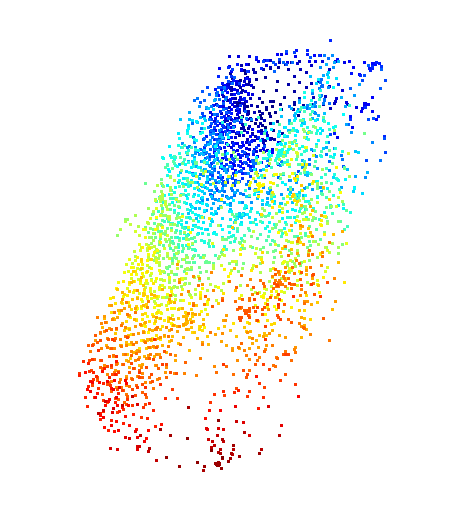
Figure 3: Results over the real-world point cloud of a car obtained using LiDAR.
Implications and Future Work
Practical Applications
The proposed framework is poised to significantly impact industries involving remote inspection and mapping. By reducing human input requirements and improving reconnaissance efficiency, autonomous systems equipped with Pred-NBV can revolutionize fields such as infrastructure inspection, agricultural monitoring, and autonomous vehicle navigation.
Future Research Directions
The authors suggest extending their work to handle noisy sensor data directly and incorporate uncertainty in their planning process using advanced ensemble methods. This would broaden the scope of real-world applications and improve robustness in diverse environments.
Conclusion
Pred-NBV offers a significant advancement in autonomous 3D object reconstruction by integrating predictive modeling with NBV planning, resulting in enhanced efficiency and robustness. This paper demonstrates how combining deep learning techniques with traditional robotics challenges can lead to practical, deployable solutions, setting a new standard for future research in autonomous perception and exploration.