- The paper proposes a hierarchical framework that integrates a Safe Sequencing policy with decentralized MPC to ensure safe and efficient merging.
- It formulates the merging challenge as a nonlinear mixed integer programming problem aimed at reducing travel time and energy consumption.
- Simulations show that the SS policy outperforms the SDF approach, maintaining robust safety even at low CAV penetration rates.
Merging Control in Mixed Traffic with Safety Guarantees: A Safe Sequencing Policy with Optimal Motion Control
Introduction
The advent of Connected and Automated Vehicles (CAVs) has the potential to significantly enhance safety and efficiency in transportation systems. However, current infrastructure must accommodate mixed traffic comprising both CAVs and Human Driven Vehicles (HDVs), which introduces unpredictability due to the variability in human driving behaviors. This paper presents a hierarchical control framework designed to ensure safe merging of CAVs and HDVs at roadway intersections by introducing a Safe Sequencing (SS) policy coupled with a decentralized Model Predictive Control (MPC) scheme.
The merging scenario considered involves vehicles approaching a Merging Point (MP) from two intersecting roads. The challenge is to ensure that CAVs integrate safely between HDVs, whose behaviors cannot be predicted with certainty. The control problem is introduced as a nonlinear mixed integer programming problem, seeking to minimize travel time and energy consumption while adhering to stringent safety constraints. The problem is decomposed into two levels: an upper-level sequencing controller and a lower-level motion controller.
Hierarchical Control Framework
Upper-Level Safe Sequencing
The SS policy is derived to prevent CAVs from merging in front of unpredictable HDVs whenever possible. A safe sequence prioritizes merging maneuvers where a CAV merges ahead of another CAV, facilitating cooperative interactions. The sequencing problem is formulated as generating the least disruptive safe sequence by comparing with the Shortest Distance First (SDF) policy, using a measure of disruption to select the optimal sequence.
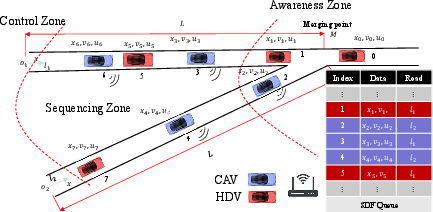
Figure 1: The merging problem, illustrating HDVs and CAVs in a merging scenario.
Lower-Level Decentralized Motion Control
For each CAV in the Safe Zone, a decentralized MPC-based controller is applied. Control Barrier Functions (CBFs) are employed to enforce safety constraints by rendering them computationally efficient, particularly in environments with mixed traffic. The MPC-CBF framework adjusts vehicle trajectories to adhere to the identified sequence while minimizing objectives related to energy consumption and travel time. The CAVs receive state information and control commands from a coordinator operated by this framework.
Simulation and Results
Comprehensive simulations demonstrate that the SS policy outperforms the conventional SDF policy across various penetration rates of CAVs. Metrics such as average travel time and energy consumption were significantly enhanced. Importantly, SS was shown to manage merging scenarios safely without explicit knowledge of human driving behaviors, thus emphasizing its robustness and applicability even at low CAV penetration rates.
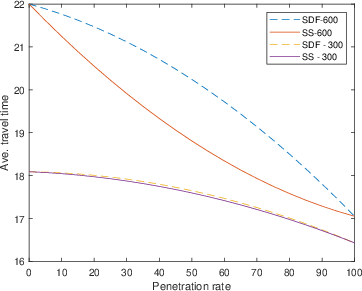
Figure 2: Average travel time of vehicles under SDF and SS.
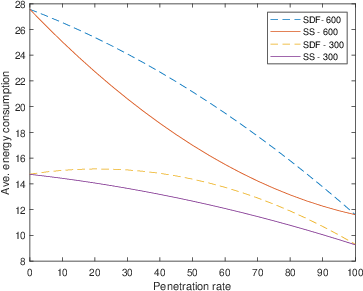
Figure 3: Average energy consumption of vehicles under SDF and SS.
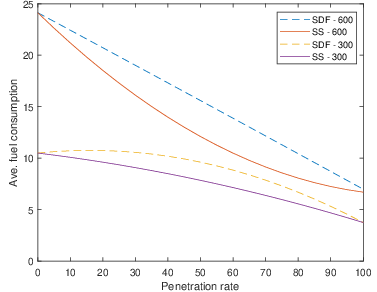
Figure 4: Average fuel consumption of vehicles under SDF and SS.
Conclusion
The proposed hierarchical control strategy provides a substantive step forward in managing mixed traffic scenarios. By facilitating safe and efficient merging through SS, this framework represents a feasible interim solution as the proportion of CAVs increases. Future work could address the integration of more sophisticated HDV behavior models or extend the framework to more complex intersection geometries or dynamic traffic conditions. The empirical evidence supports a notable improvement in network performance, particularly under low CAV penetration situations, showcasing the considerable potential of CAV technologies in advancing current traffic systems.