- The paper demonstrates a convex optimization framework that integrates supervisory control with fixed path speed trajectory generation for hybrid electric ships.
- It reformulates nonconvex maritime dynamics into a spatial-domain convex problem, achieving global optimality and fast computation (<0.5s per solution).
- Validation against high-fidelity models and real maneuvers confirms its potential for enhancing energy management and autonomous ship control.
Integrated Supervisory Control and Convex Speed Trajectory Generation for Hybrid Electric Ships
Problem Context and Motivation
Stringent emissions regulations and the drive for efficiency have prompted significant interest in hybrid-electric architectures in shipping. However, supervisory control strategies often underperform if the operational trajectory is not precisely known or optimally planned. The paper "Integrated supervisory control and fixed path speed trajectory generation for hybrid electric ships via convex optimization" (2307.06184) introduces a formal method for fusing time- and fuel-optimal fixed-path trajectory generation with integrated energy management for hybrid powertrains using convex optimization. The central challenge addressed is the inherently nonconvex and nonlinear structure of high-fidelity marine dynamics, propulsor maps, and energy flows, which complicates the use of computationally robust optimization solvers for onboard or real-time applications.
Methodological Innovations
The authors present an explicit convexification approach for the simultaneous optimization of vessel speed trajectories and powertrain energy management along a fixed path, characterized by:
- Spatial-Domain Reformulation: The original minimum-time and fuel problem, nonconvex in the time domain, is reformulated in the path (spatial) domain, allowing variable changes that expose underlying convex structure.
- Convex Vessel Model: Three-degree-of-freedom vessel dynamics are represented in a convex form, with hydrodynamic forces (resistance, drift, rudder, and yaw damping), propeller thrust and torque, and propulsor constraints all expressed by affine or convex constraints.
- Convex Powertrain Representation: The electrical drivetrain, general energy converters (diesel gensets or fuel cells), and battery storage are modeled with convex constraint sets. Battery loss models and SoC management are also convexified. Supervisory control (power split) is embedded in the global convex program.
- Auxiliary Variables and Relaxations: Nonconvex terms (e.g., product of speed and shaft speed for propulsor modeling) are replaced with auxiliary variables and relaxations that maintain convexity. The validity is established via Pontryagin's Minimum Principle: under mild physical conditions, the solution to the relaxed problem is exact.
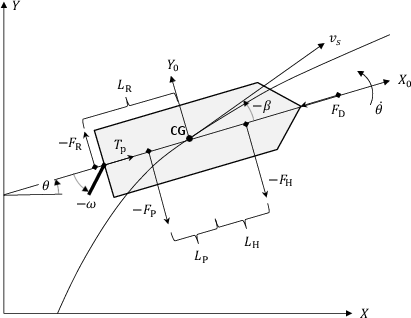
Figure 1: Hull force decomposition, showing main hydrodynamic contributions (resistance, drift, rudder lift, and yaw damping) addressed in the convexified model.
Validation Against High-Fidelity Models
To support the convexification, each subsystem model is validated:
- Propeller Modeling: Poly2 fits for thrust and torque coefficients (KT, KQ) are shown to achieve average relative errors under 5% for 77% of the Wageningen B-Series propellers. The choice of a convex quadratic model thus preserves accuracy around typical operating points, consistent with marine propulsion standards.
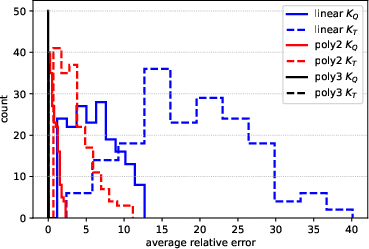
Figure 2: Histogram of average relative error for thrust and torque coefficients using linear, quadratic, and cubic fits over the Wageningen B-Series, illustrating the suitability of the convex quadratic model.
- Hydrodynamics: The model is compared with towing tank measurements for the benchmark 5415 hull, including hull and rudder force and moment predictions in captive experiments. The convex model matches cross-body (drift) and yaw moments with high fidelity at moderate input levels, underestimating extreme drift but remaining valid in operational regimes of interest.
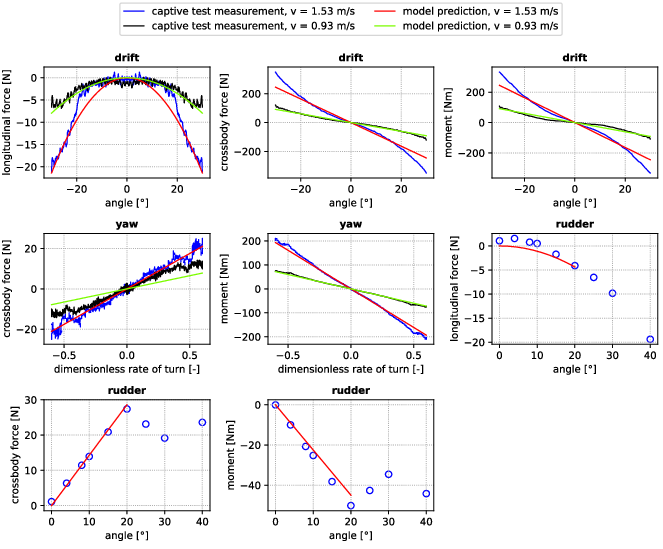
Figure 3: Comparison of hydrodynamic force predictions (convex model) with measurement data for various operating conditions.
- Closed-Loop Maneuver Validation: The 20/20 zig-zag maneuver (an IMO benchmark) is simulated, yielding accurate heading and turn-rate predictions when compared to tank data, although some lag in position and speed reduction is noted due to model simplicity.
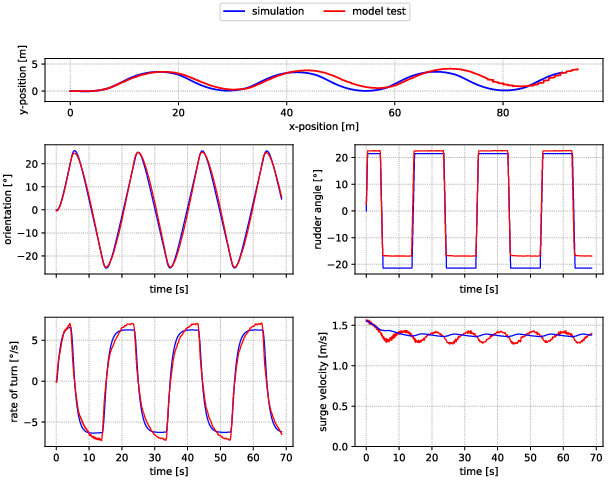
Figure 4: Zig-zag maneuver results, comparing simulated (convex) and experimental vessel responses.
- Realistic Voyage Segments: The framework models arbitrary fixed paths (e.g., Bezier curves with 40 control points), battery-powered and engine-powered legs (including zero-emission segments), and complex operational constraints.
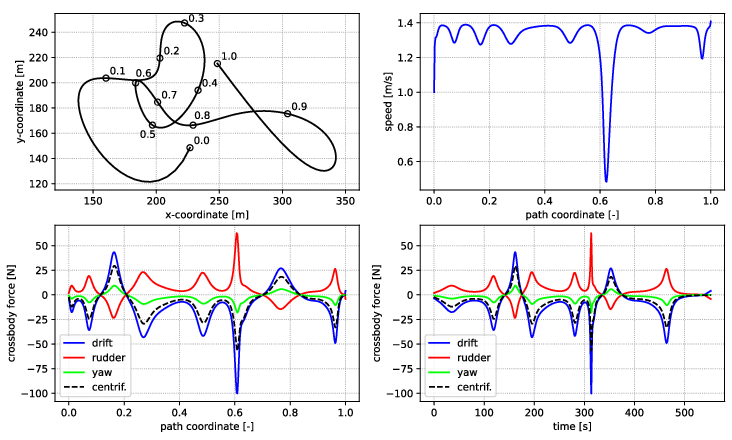
Figure 5: Example randomly generated voyage: path, speed history, and associated hull forces produced by the convex solver.
Numerical Results and Optimality-Front Characterization
The objective is a convex scalarization of voyage time and total fuel/pollutant consumption, which facilitates the construction of a Pareto optimal trade-off surface via parameter sweep over time-vs-fuel weights. Notably, the convexity guarantees that each solution is globally optimal and computationally robust (solution times < 0.5s for n=399 discretizations), enabling applications in fast feedback or onboard optimization.
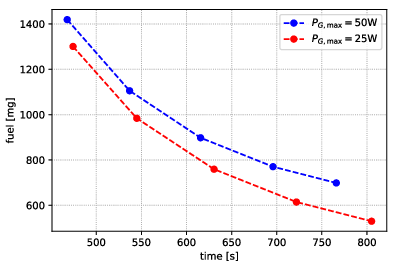
Figure 6: Pareto front illustrating the trade-off between fuel consumption and voyage time for different converter sizes, emphasizing the benefit of operating converters closer to design point for fuel efficiency.
For battery-sustained zero-emission segments, the framework optimally manages state-of-charge to meet segment constraints while minimizing fuel. The battery is charged and discharged as necessary, subject to convex power and capacity limits.
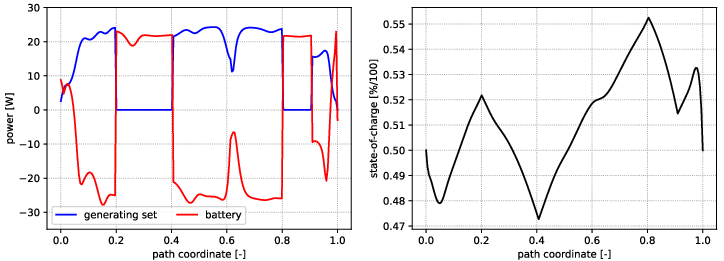
Figure 7: Solution featuring enforced zero-emission segments (converter off), with battery charge/discharge coordinated by the solver.
Theoretical and Practical Implications
Advantages:
- The convexified problem formulation is amenable to efficient interior point methods and can be solved reliably and quickly, overcoming the limitations of DP approaches (curse of dimensionality) and ad hoc heuristics.
- All major physical and operational constraints (energy converter states, battery limits, SoC sustainability, speed limits, zero-emission segments) can be embedded declaratively.
- Guarantees of global optimality and infeasibility detection are obtained, which are critical for safety and autonomy.
Limitations and Extensions:
- The models, though high-fidelity for convex relaxations, do not capture all nonlinearities arising in extreme maneuvers and higher-order hydrostatic/hydrodynamic phenomena.
- Only fixed-pitch propeller models are handled explicitly; controllable pitch or time-varying path planning remain for future work.
- All computations assume a fixed path; integrating obstacle avoidance, environmental uncertainty (currents, waves), or multi-agent coordination would require further methodological extensions.
Future Directions
- Controllable Pitch Propulsor Extensions: Extending convex formulations to include controllable-pitch propeller or thruster models could enhance applicability to a wider ship class.
- Environmental and Stochastic Factors: Incorporating variable sea state, currents, and forecasting uncertainty directly into the convex framework may enable robust real-time GNC for autonomous systems.
- Real-Time and Embedded Implementation: Fast custom solvers leveraging the sparsity and structure of the convex program could yield truly embedded or hardware-in-the-loop implementations for unmanned surface vehicles.
- Feedback Integration: Coupling the feedforward trajectory and power profiles with robust feedback control, including estimation (sensor fusion), remains an active area for integrated vessel automation.
Conclusion
This work demonstrates that a physics-based, high-fidelity, but computationally intractable maritime supervisory control and planning problem can be transformed into a convex optimization program. The resulting integrated GNC and energy management framework achieves fast, robust, and globally optimal speed and powertrain trajectories for hybrid electric vessels, validated against experimental benchmarks and propulsor databases. The approach is directly relevant for autonomous and smart shipping, where real-time, reliable, and safe onboard optimization is required. Extensions toward richer physical models, uncontrollable environments, and deployment on real-time platforms will further expand the potential impact of this methodology.