- The paper presents a novel three-stage workflow that integrates detection, mapping, and extraction to identify structural anomalies in concrete bridges.
- It employs state-of-the-art segmentation models like TopoCrack, nnU-Net, and DetectionHMA alongside DBSCAN clustering for precise instance extraction.
- The method achieves over 90% IoU for crack and corrosion detection, underscoring its potential for advancing automated structural health monitoring.
ENSTRECT: A Stage-based Approach to 2.5D Structural Damage Detection
The paper "ENSTRECT: A Stage-based Approach to 2.5D Structural Damage Detection" (2401.03298) presents a three-stage workflow for detecting and mapping structural anomalies in concrete bridges into 3D space. This approach addresses the challenges posed by limited 3D data availability, utilizing robust image-level detection techniques to project results onto a 3D model. The methodology involves sequential stages of detection, mapping, and extraction, significantly contributing to structural health monitoring (SHM) and infrastructure inspection processes.
Workflow and Detection Stage
The workflow consists of three primary stages: detection, mapping, and extraction. Initially, structural anomalies are detected on the image level using state-of-the-art (SOTA) semantic segmentation models, including TopoCrack, nnU-Net, and DetectionHMA. These models are specifically tailored for anomaly detection as follows:
- TopoCrack utilizes a TernausNet architecture, a variant of the U-Net model, and introduces TOPO loss to preserve the continuity of crack detection.
- nnU-Net leverages heuristic rules for minimal manual intervention, aiming for self-configuration that adapts well to various 2D and 3D segmentation tasks.
- DetectionHMA uses hierarchical multi-scale attention logic to effectively detect anomalies by dynamically combining results from different scales.
Mapping Stage
The 3D mapping stage is pivotal to transferring detection results from 2D images to a 3D point cloud environment. Using a weighted view aggregation strategy based on angular information, point colors in the cloud are determined according to class labels derived from heatmaps. This process enables effective colorization, ensuring accurate depiction of detected anomalies in 3D space.
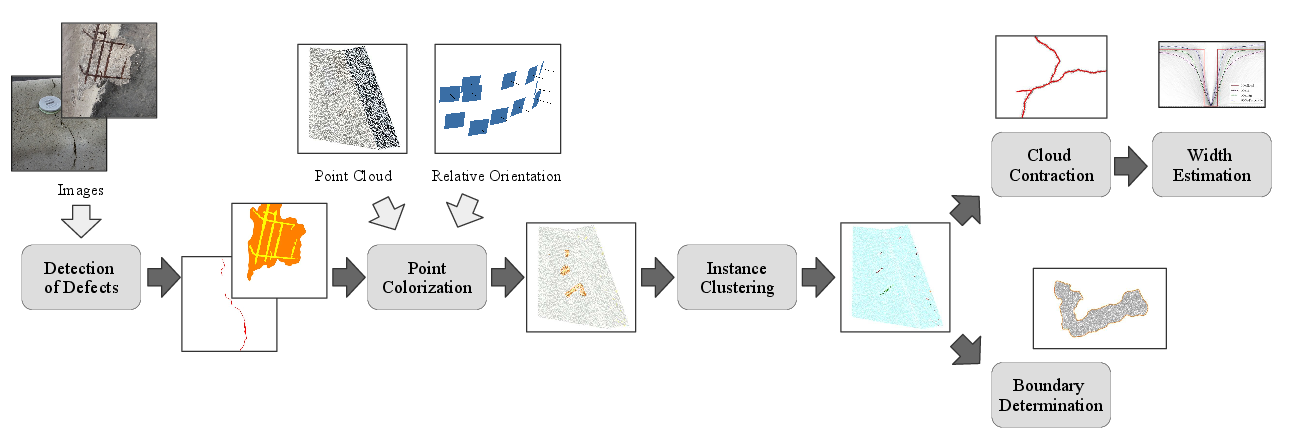
Figure 1: Components and workflow of the 3D detection pipeline.
Extraction Stage and Quantitative Analysis
In the extraction stage, points in the dense cloud are clustered (using DBSCAN) to identify individual instances of anomalies like cracks, spalling, and corrosion. The instance extraction uses specific strategies for each anomaly type:
- Cracks are processed using Laplacian-based cloud contraction, resulting in a medial axis representation. This contracted axis allows for crack width estimation and subsequent quantitative evaluation.
- Areal Defects (Spalling/Corrosion) utilize 2D mapping via PCA and alpha shapes to define bounding polygons, aiding in accurate area estimation.
Figures illustrating the process include images of medial axis repositioning and bounding polygons overlaid on detailed 3D meshes.

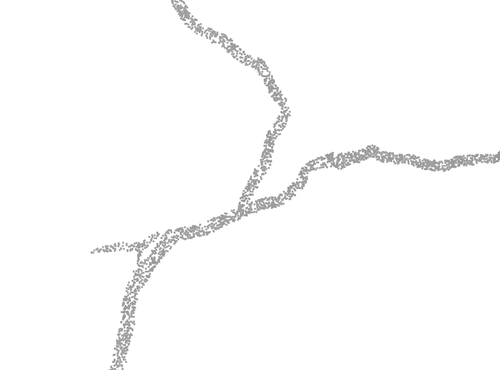
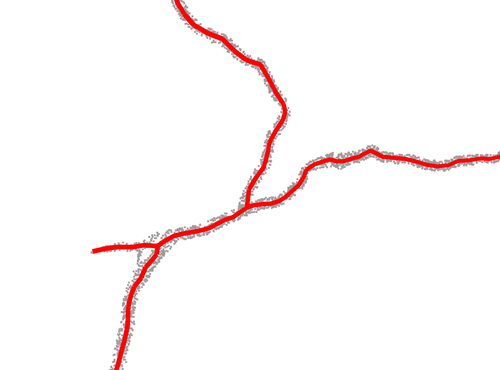

Figure 2: Textured mesh showing an exposed reinforcement bar.
Results
Quantitative analysis utilizes Intersection-over-Union (IoU) and Average Precision (AP) metrics, highlighting the effectiveness of nnU-Net for areal detection and DetectionHMA for crack detection. These results confirm IoU values exceeding 90% for crack and corrosion identification under a reasonable positional tolerance, though instance-level detection using AP suggests room for improvement.

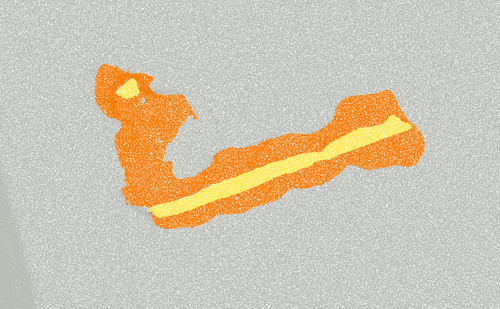



Figure 3: Qualitative test results for 3D damage detection. Comparison of the models on various bridge segments.
Conclusion
The approach outlined in ENSTRECT shows promising avenues for future development in structural anomaly detection. While integration of multi-view image analyses provides a strong foundation, further research is encouraged to enhance instance detection and explore native 3D anomaly detection methodologies. This work exemplifies the potential for automating complex structural inspections, emphasizing the need for efficient data processing pipelines that handle large-scale, high-resolution datasets inherent to real-world scenarios. Additionally, scaling challenges underline the importance of utilizing meshes alongside point clouds for effectively representing and analyzing structural integrity within vast and complex infrastructures.

