Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
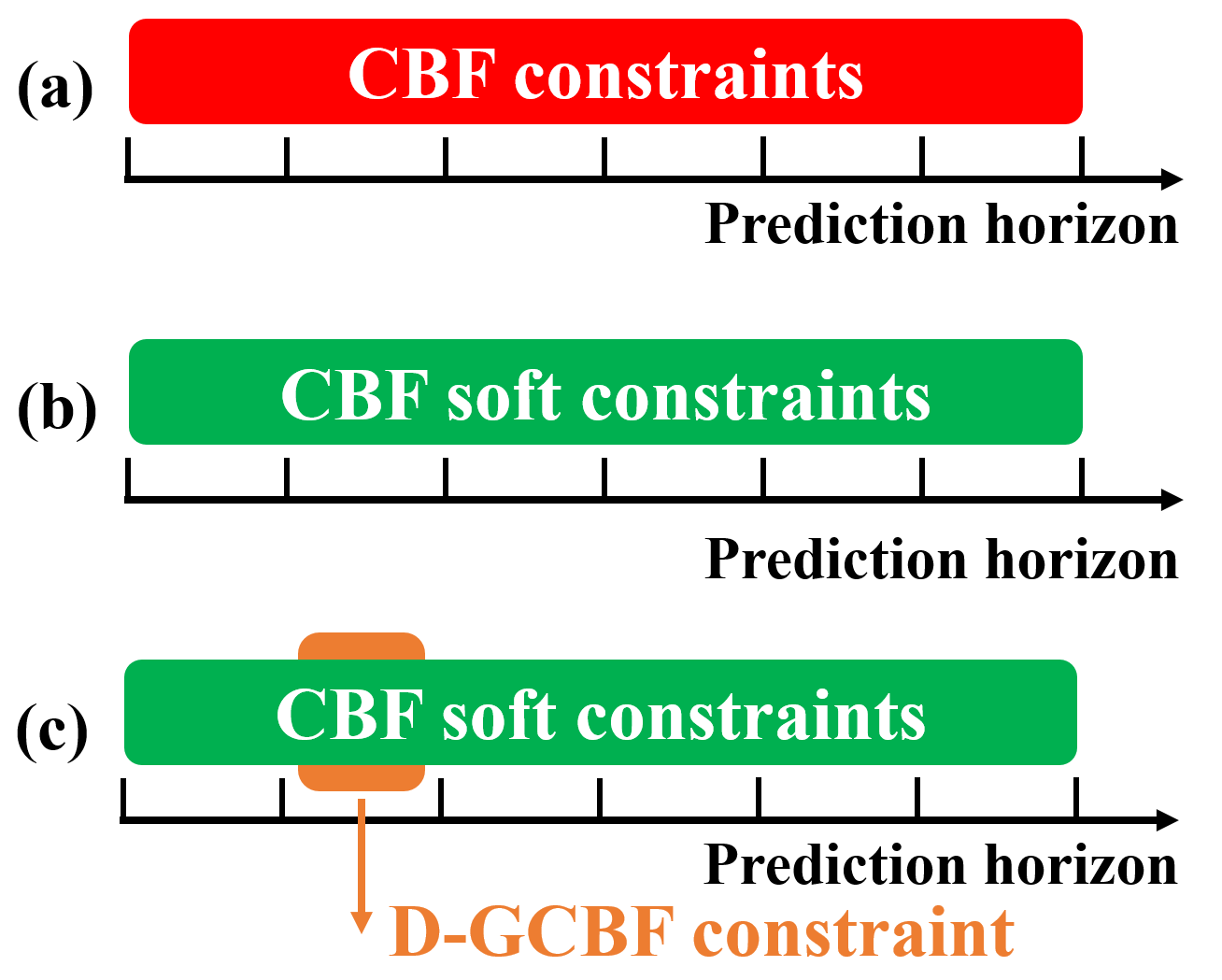
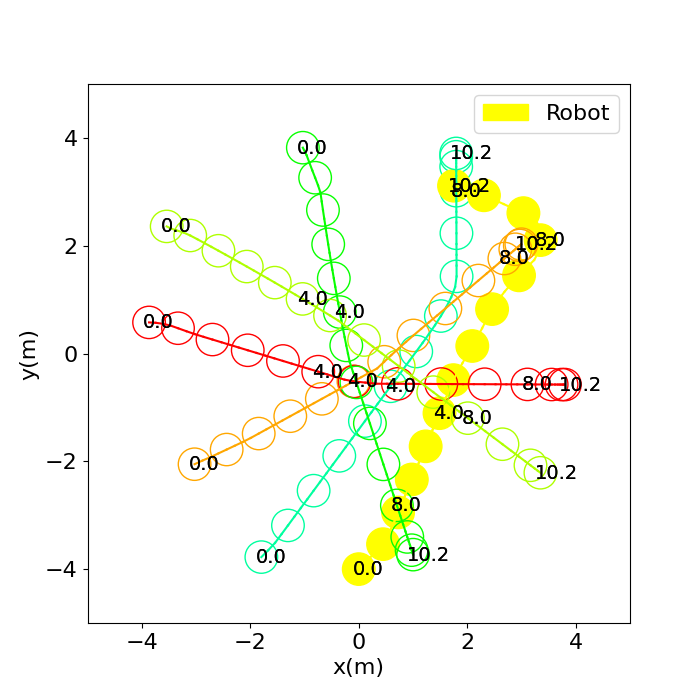
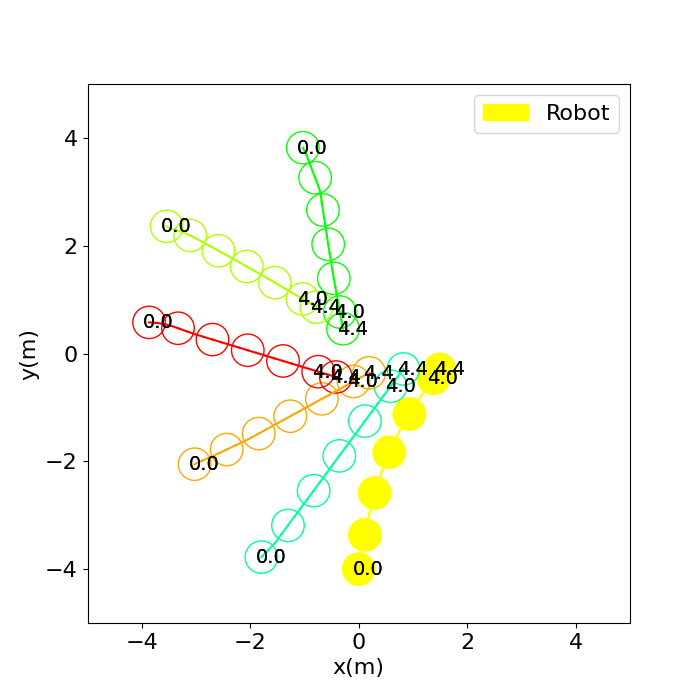
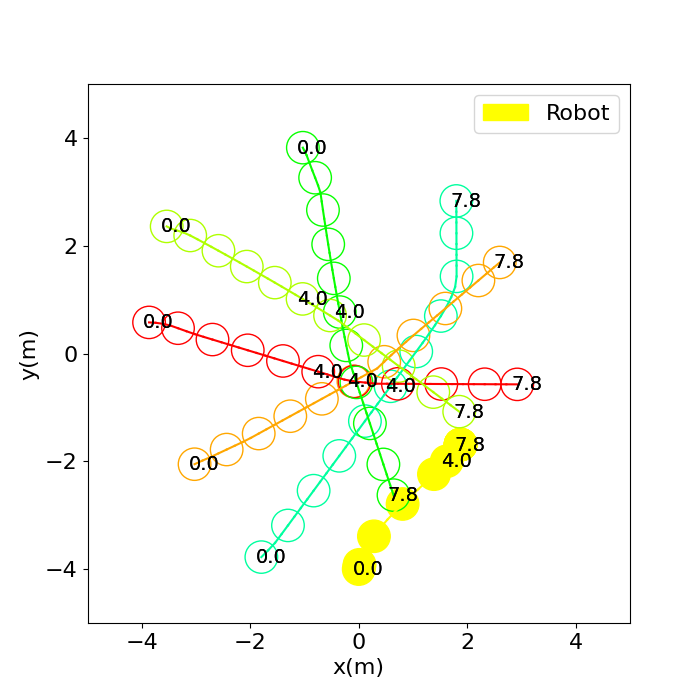
Abstract: Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
- A. J. Lee, W. Song, B. Yu, D. Choi, C. Tirtawardhana, and H. Myung, “Survey of robotics technologies for civil infrastructure inspection,” Journal of Infrastructure Intelligence and Resilience, vol. 2, no. 1, p. 100018, 2023.
- J. Zeng, B. Zhang, and K. Sreenath, “Safety-critical model predictive control with discrete-time control barrier function,” in 2021 American Control Conference (ACC). IEEE, 2021, pp. 3882–3889.
- Z. Jian, Z. Yan, X. Lei, Z. Lu, B. Lan, X. Wang, and B. Liang, “Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 3679–3685.
- P. Fiorini and Z. Shiller, “Motion planning in dynamic environments using velocity obstacles,” The International Journal of Robotics Research, vol. 17, no. 7, pp. 760–772, 1998.
- J. Van Den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body collision avoidance,” in Robotics Research: The 14th International Symposium ISRR. Springer, 2011, pp. 3–19.
- D. J. Gonon, D. Paez-Granados, and A. Billard, “Reactive navigation in crowds for non-holonomic robots with convex bounding shape,” IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4728–4735, 2021.
- Y. Chen, F. Zhao, and Y. Lou, “Interactive model predictive control for robot navigation in dense crowds,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 52, no. 4, pp. 2289–2301, 2021.
- C. Chen, Y. Liu, S. Kreiss, and A. Alahi, “Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning,” in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 6015–6022.
- H. Yang, C. Yao, C. Liu, and Q. Chen, “RMRL: Robot navigation in crowd environments with risk map-based deep reinforcement learning,” IEEE Robotics and Automation Letters, 2023.
- M. Boldrer, A. Antonucci, P. Bevilacqua, L. Palopoli, and D. Fontanelli, “Multi-agent navigation in human-shared environments: A safe and socially-aware approach,” Robotics and Autonomous Systems, vol. 149, p. 103979, 2022.
- B. Lindqvist, S. S. Mansouri, A.-a. Agha-mohammadi, and G. Nikolakopoulos, “Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles,” IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6001–6008, 2020.
- B. Brito, B. Floor, L. Ferranti, and J. Alonso-Mora, “Model predictive contouring control for collision avoidance in unstructured dynamic environments,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4459–4466, 2019.
- A. Thirugnanam, J. Zeng, and K. Sreenath, “Safety-critical control and planning for obstacle avoidance between polytopes with control barrier functions,” in 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 286–292.
- J. Zeng, Z. Li, and K. Sreenath, “Enhancing feasibility and safety of nonlinear model predictive control with discrete-time control barrier functions,” in 2021 60th IEEE Conference on Decision and Control (CDC). IEEE, 2021, pp. 6137–6144.
- H. Ma, X. Zhang, S. E. Li, Z. Lin, Y. Lyu, and S. Zheng, “Feasibility enhancement of constrained receding horizon control using generalized control barrier function,” in 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS). IEEE, 2021, pp. 551–557.
- X. Zhang, A. Liniger, and F. Borrelli, “Optimization-based collision avoidance,” IEEE Transactions on Control Systems Technology, vol. 29, no. 3, pp. 972–983, 2020.
- A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” in 2019 18th European Control Conference (ECC), 2019, pp. 3420–3431.
- G. Di Pillo and L. Grippo, “Exact penalty functions in constrained optimization,” SIAM Journal on Control and Optimization, vol. 27, no. 6, pp. 1333–1360, 1989.
- E. C. Kerrigan and J. M. Maciejowski, “Soft constraints and exact penalty functions in model predictive control,” Proc. UKACC International Conference (Control 2000), 2000.
- T. Anevlavis, Z. Liu, N. Ozay, and P. Tabuada, “Controlled invariant sets: implicit closed-form representations and applications,” arXiv preprint arXiv:2107.08566, 2021.
- K. Feng, Z. Lu, J. Xu, H. Chen, and Y. Lou, “A safety filter for realizing safe robot navigation in crowds,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 9729–9736.
- B. Tearle, K. P. Wabersich, A. Carron, and M. N. Zeilinger, “A predictive safety filter for learning-based racing control,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7635–7642, 2021.
- M. Sun and D. Wang, “Initial shift issues on discrete-time iterative learning control with system relative degree,” IEEE Transactions on Automatic Control, vol. 48, no. 1, pp. 144–148, 2003.
- J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear optimization and optimal control,” Mathematical Programming Computation, vol. 11, pp. 1–36, 2019.
- L. T. Biegler and V. M. Zavala, “Large-scale nonlinear programming using IPOPT: An integrating framework for enterprise-wide dynamic optimization,” Computers & Chemical Engineering, vol. 33, no. 3, pp. 575–582, 2009.
- J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, and R. Siegwart, “Optimal reciprocal collision avoidance for multiple non-holonomic robots,” in Distributed autonomous robotic systems: The 10th international symposium. Springer, 2013, pp. 203–216.
- C. M. Pappalardo and D. Guida, “Forward and inverse dynamics of a unicycle-like mobile robot,” Machines, vol. 7, no. 1, p. 5, 2019.
- A. H. Lang, S. Vora, H. Caesar, L. Zhou, J. Yang, and O. Beijbom, “PointPillars: Fast encoders for object detection from point clouds,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2019.
- X. Weng, J. Wang, D. Held, and K. Kitani, “3d multi-object tracking: A baseline and new evaluation metrics,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 10 359–10 366.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.