- The paper introduces a hybrid framework combining local GP signed distance fields with a VDB structure that supports scalable mapping in dynamic environments.
- It employs efficient testing point generation via voxelized depth sensor data and ray-casting, thereby reducing computational overhead.
- The evaluation demonstrates superior accuracy and efficiency compared to traditional TSDFs and Octrees, providing robust real-time mapping for robotics.
VDB-GPDF: Online Gaussian Process Distance Field with VDB Structure
Introduction
In robotic mapping, dense representations such as TSDFs and Octrees are prevalent but come with limitations like inefficiency in large environments and overestimation of Euclidean distances. TSDFs often extrapolate Euclidean distances directly from depth data, while Octrees require complex tree traversals, potentially increasing computational costs. Gaussian Process (GP) based approaches provide a probabilistic framework, offering continuous representations but traditionally suffer from cubic computational complexity. This paper introduces VDB-GPDF, an efficient mapping framework that integrates GP distance fields with OpenVDB, a fast-access data structure to enhance scalability and ease of deployment across large-scale environments.
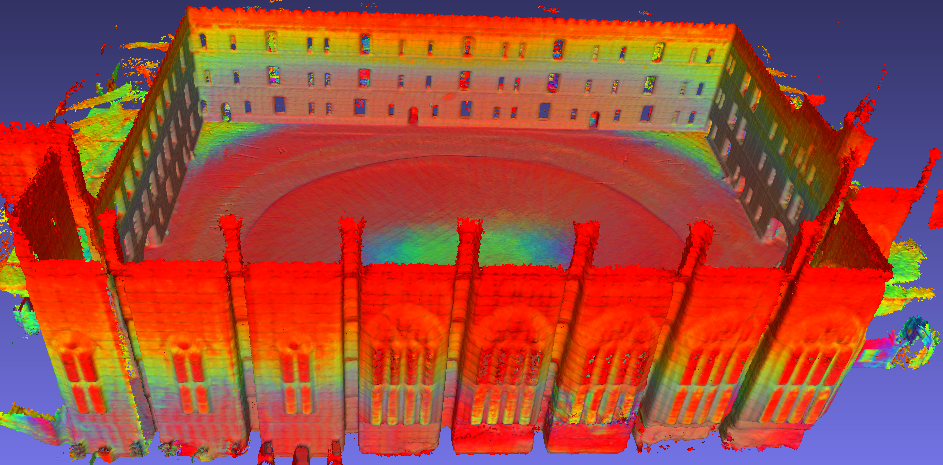
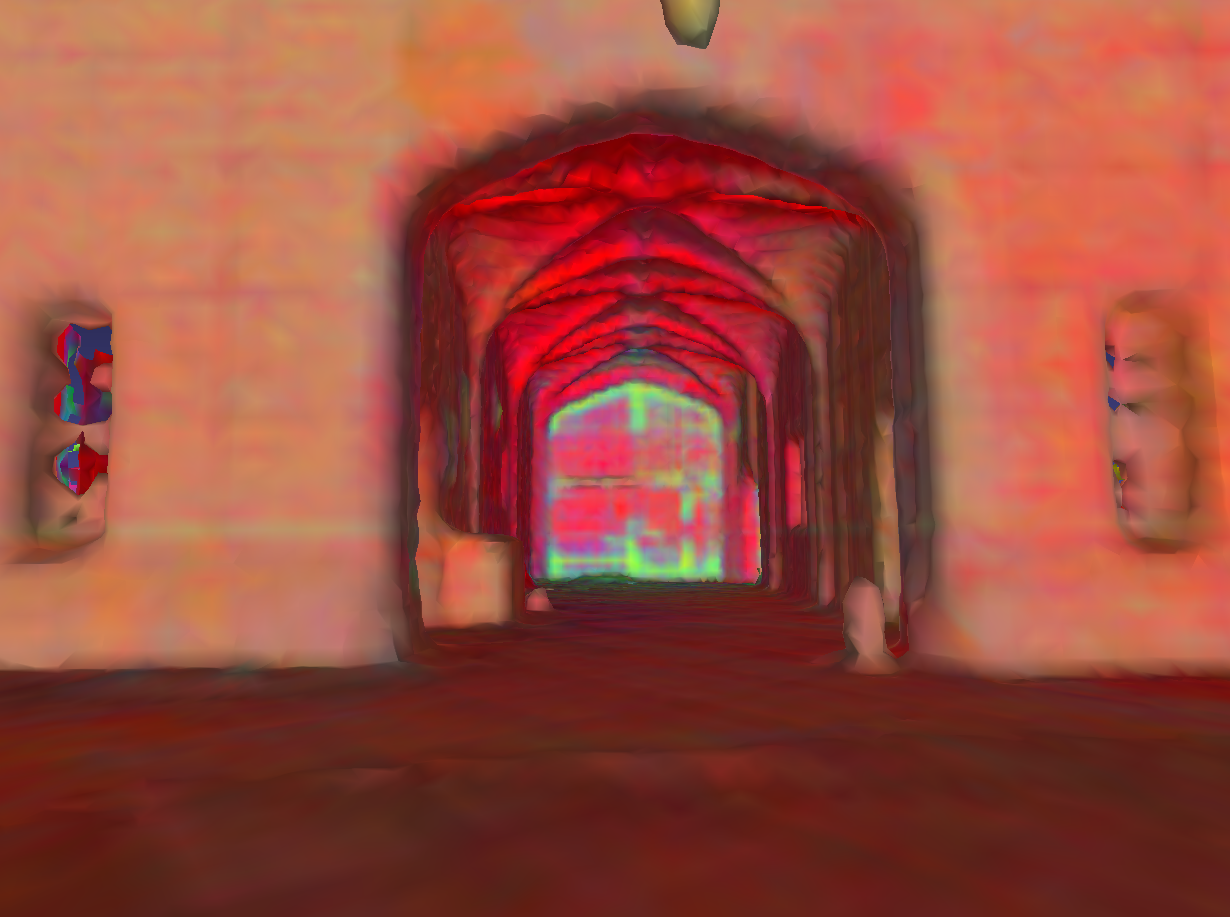
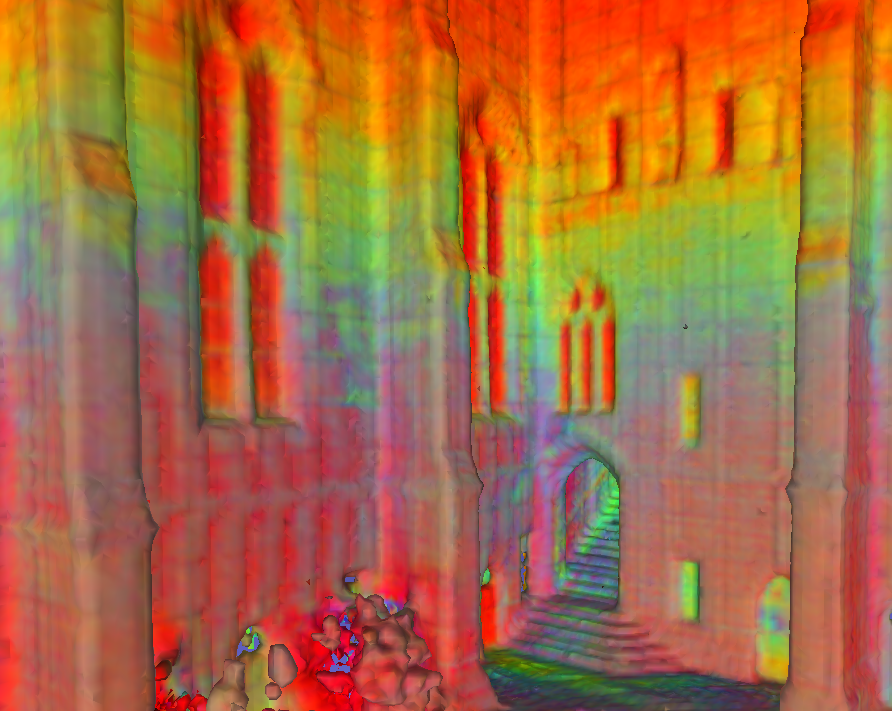

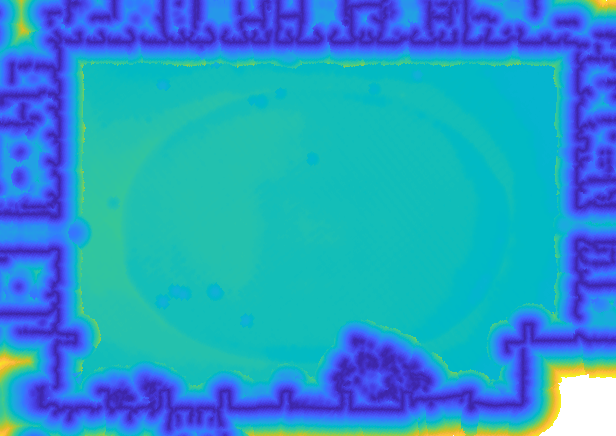
Figure 1: 3D dense reconstruction and distance field from VDB-GPDF framework.
Methodology
The VDB-GPDF framework builds upon the fusion of Local Gaussian Process Signed Distance Fields (L-GPDF) within a VDB data structure to provide rapid and probabilistic querying of distances and surface properties.
- Local Gaussian Process Signed Distance Field (L-GPDF): L-GPDFs are ephemeral GPs constructed at each frame, leveraging voxel centers from a hierarchical VDB for training. The method decomposes the problem into manageable clusters, allowing efficient distance and variance inference, which is critical for accommodating dynamic and large-scale environments.
- Testing Points Generation: The framework enhances the traditional free-space carving technique by voxelizing the raw point cloud from a depth sensor. By ray-casting from the sensor origin to each voxel, a set of voxels are selected as testing points to achieve efficient and complete coverage, even when the sensor's rays are nearly parallel to the observed surfaces.
- Data Fusion: The inferred values from the L-GPDF, accounting for mean and variance, are fused into a global VDB grid, effectively propagating accurate ESDFs through the system. This fusion process efficiently updates each frame's data while preserving temporal consistency.
- Global Gaussian Process Signed Distance Field (G-GPDF): The G-GPDF is developed via a Marching Cubes algorithm to manage the zero-crossing points effectively, allowing accurate and smooth ESDFs suitable for downstream applications like path planning and navigation.
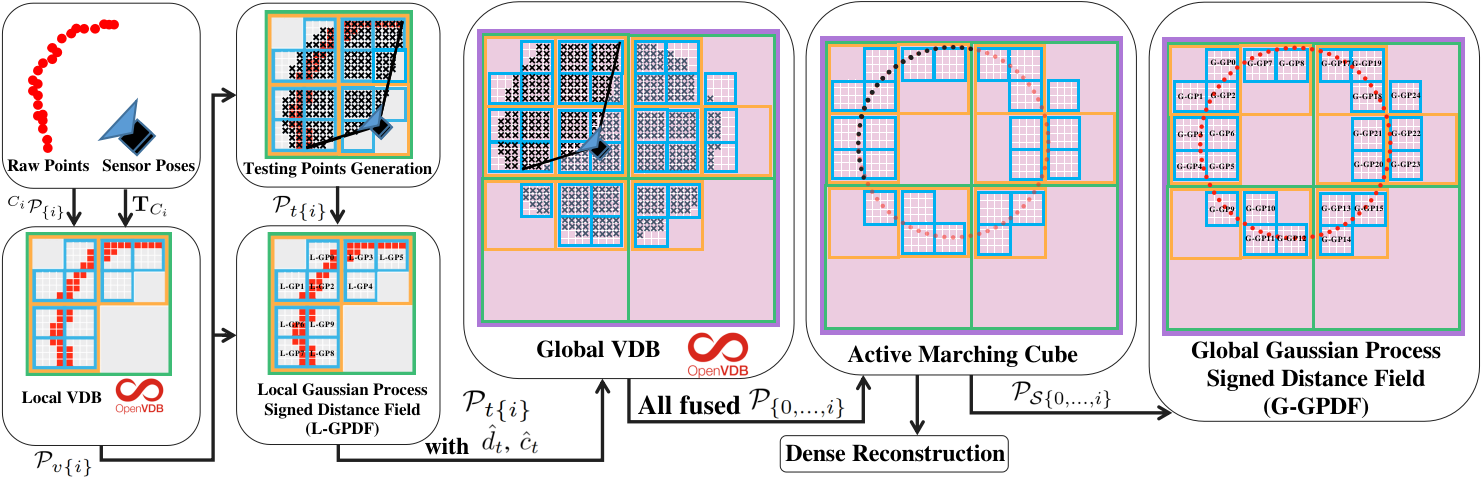
Figure 2: Block Diagram of the proposed VDB-GPDF framework.
Evaluation
- Efficiency: VDB-GPDF outperforms traditional frameworks by minimizing computational overhead, leveraging the hierarchical processing capabilities of VDBs instead of Octrees, which often entail complex tree structures and slower data access.
- Accuracy: The framework provides superior ESDF accuracy, demonstrating robust performance in both reconstruction accuracy (using Chamfer distance metrics) and distance field accuracy across various environments, as illustrated in quantitative comparisons.
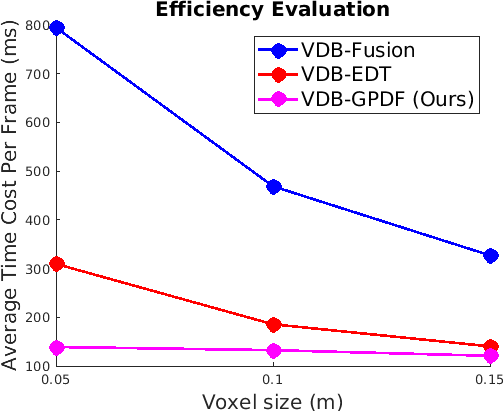
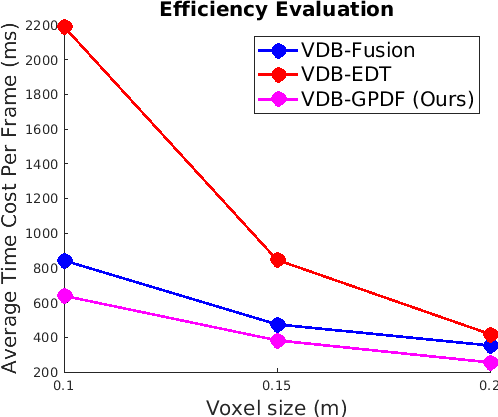
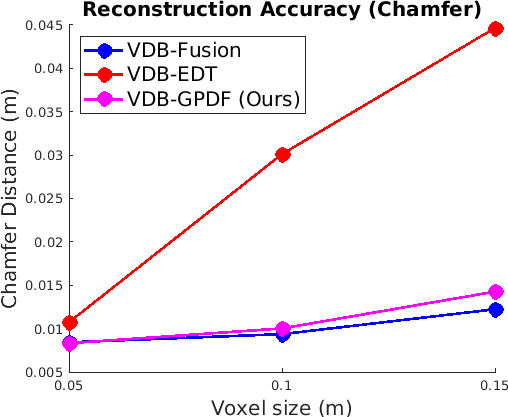
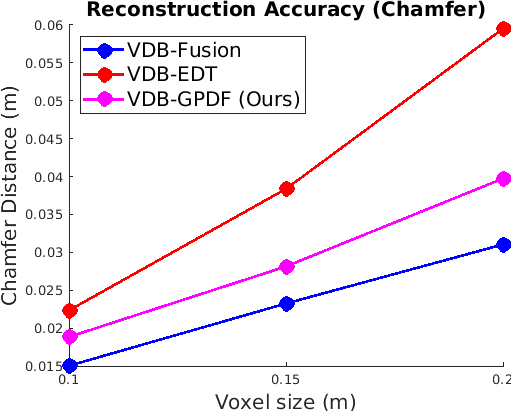
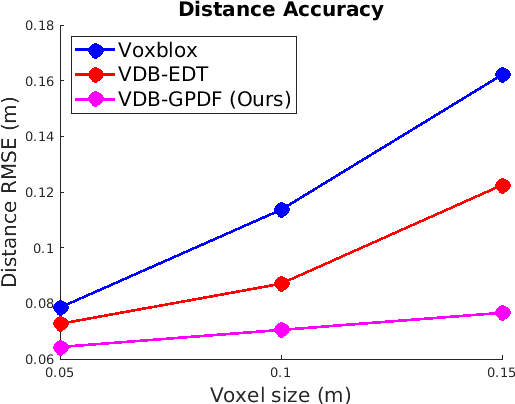
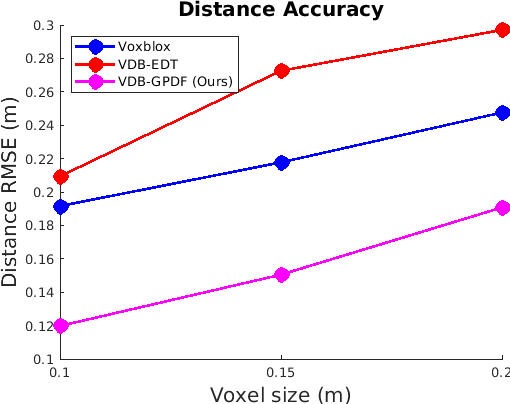
Figure 3: Quantitative comparisons of performance metrics.
Qualitative and Quantitative Comparison
The experiments conducted on datasets demonstrate VDB-GPDF's capability to maintain map accuracy amidst dynamic and static environments, outperforming alternatives like VDBFusion regarding efficiency and resulting map quality.
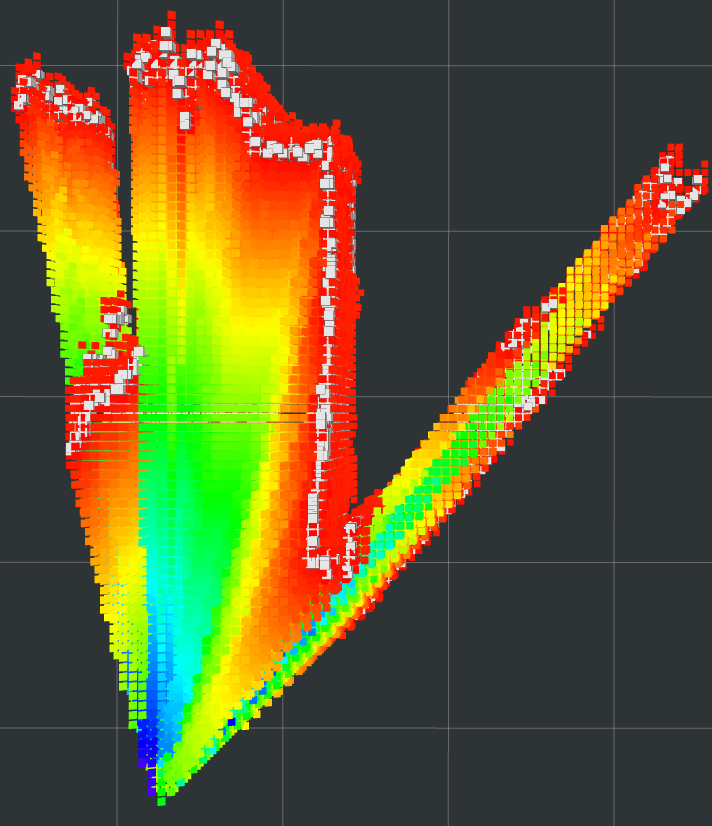
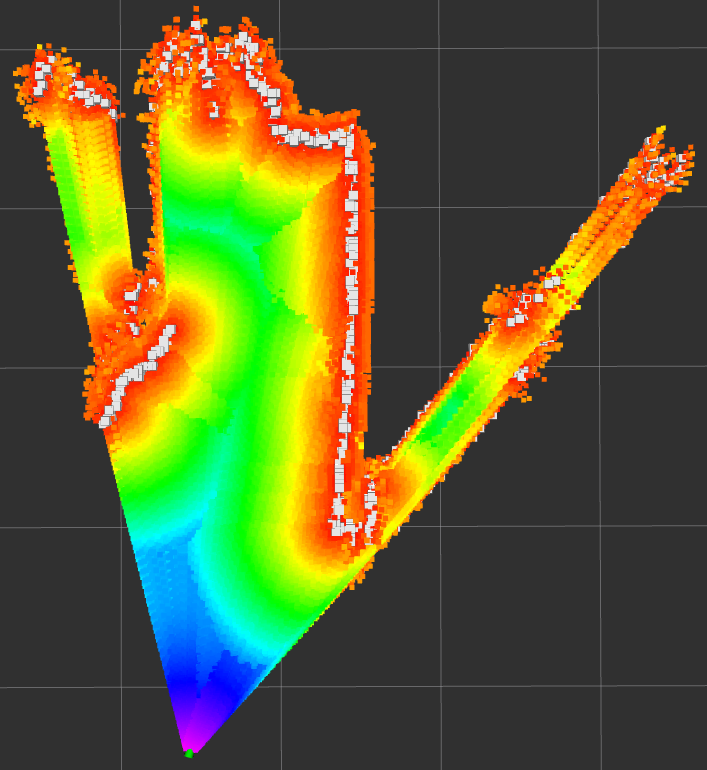
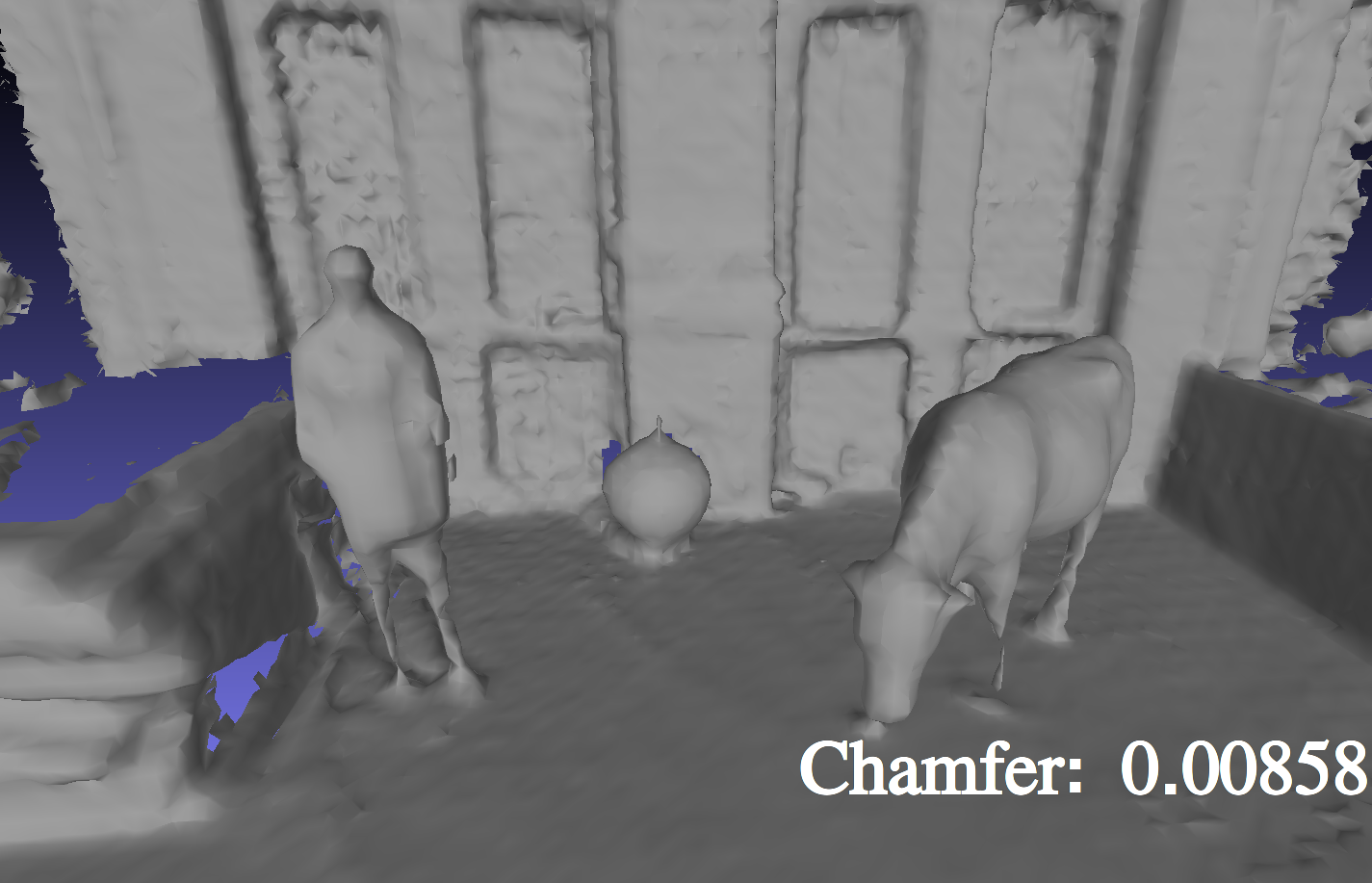
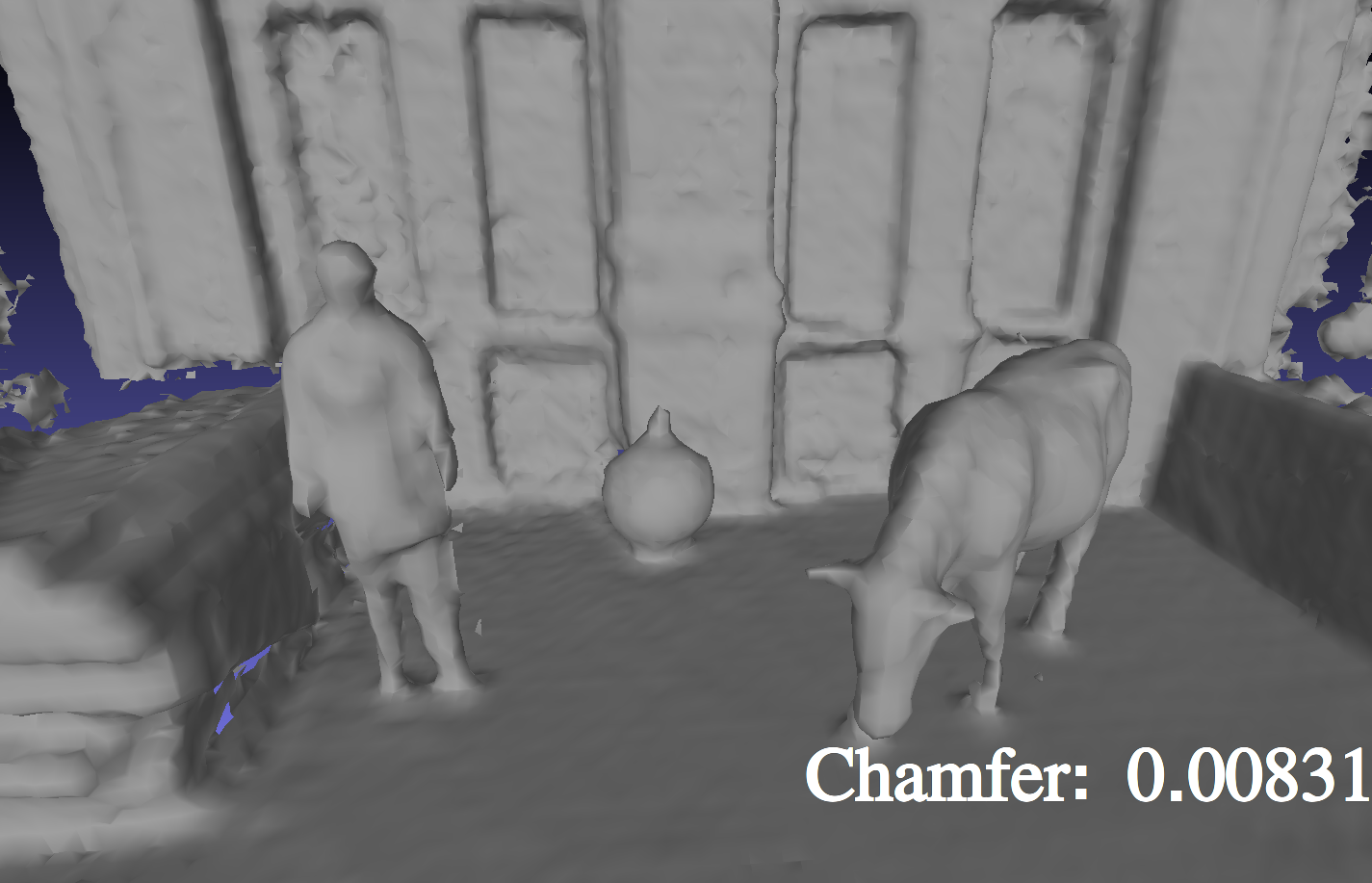
Figure 4: Comparison of TSDF fusion from VDBFusion versus the proposed ESDF fusion.
Conclusion
The VDB-GPDF framework provides a robust solution to online GP distance field mapping in large environments, overcoming computational and accuracy limitations of both conventional TSDF and Octree-based approaches. Its contributions to the scalability, adaptability, and efficiency of robotic mapping frameworks highlight its potential to serve as the backbone for future advancements in real-time mapping applications. Future research could explore dynamic element prediction capabilities to further enhance performance in rapidly changing environments.