- The paper presents a novel 3D edge mapping technique using Gaussian splatting that improves accuracy by explicitly representing edge points.
- It overcomes implicit sampling issues and lengthy training times by aligning edge points as centers of 3D Gaussians with defined orientations.
- The method achieves up to 30 times faster runtimes and competitive precision on benchmarks like ABC-NEF and DTU, enabling real-time applications.
EdgeGaussians -- 3D Edge Mapping via Gaussian Splatting
The paper introduces a methodology named EdgeGaussians, which proposes an efficient and explicit representation for 3D edge mapping using Gaussian Splatting. This method addresses the shortcomings of existing state-of-the-art methods that rely on computationally intensive implicit representations and sampling inaccuracies. It establishes a more straightforward, precise, and faster approach for 3D edge reconstruction with a focus on applications in various computer vision tasks.
Introduction
Edges are fundamental visual primitives crucial for various computer vision applications, including mapping, localization, and rendering. Traditional methods for reconstructing 3D edges from images face challenges such as detection inaccuracy and high computational costs. The EdgeGaussians approach aims to overcome these by employing a direct learning method for 3D edges.
The paper highlights two main drawbacks of existing methods: the inefficiency of sampling on exact level sets due to floating-point inaccuracies and long training times involved in learning implicit representations. EdgeGaussians addresses these by using 3D Gaussians to explicitly map edge points, which circumvents the need for point sampling and intensive computations.
Methodology
Gaussian Representation
The proposed method represents 3D edge points as the centers of 3D Gaussians, with the edge directions defined as the principal axes of these Gaussians.
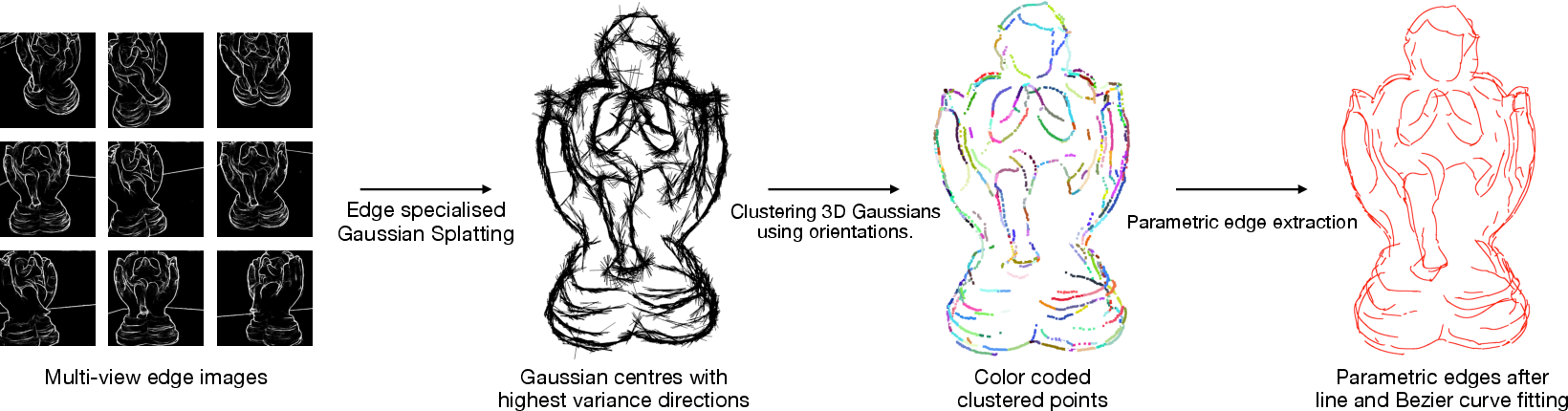
Figure 1: EdgeGaussians: the proposed method learns 3D edge points with an explicit representation where an edge point is cast as a 3D Gaussian centered at that point and the edge direction defines the main orientation of the Gaussian.
Such a representation is not only geometrically meaningful but also allows for efficient training optimizations inspired by Gaussian splatting. The training process is supervised using 2D edge maps generated by pre-existing edge detectors.
Overcoming Occlusion and Sparsity
The methodology accounts for the inherent sparsity and occlusion issues related to 3D edges. Occluded edges are identified, allowing the model to correctly render only the visible parts of edges in the training data as shown below.
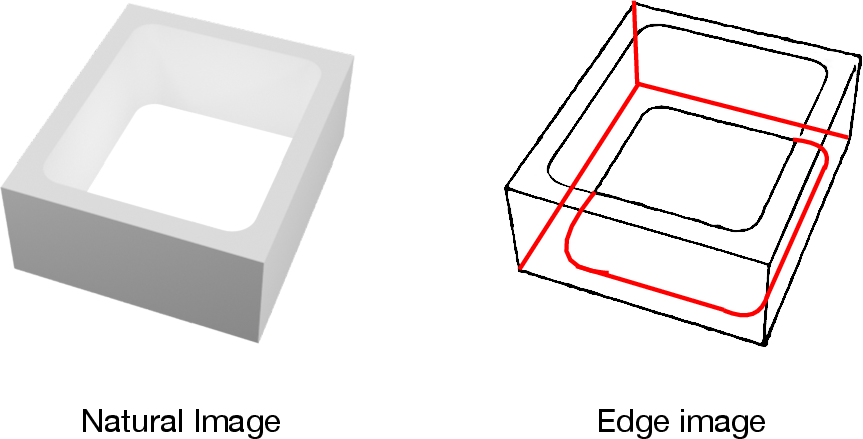
Figure 2: Occlusions for 3D edges. The red edges are the occluded edges absent from the supervisory 2D edge maps.
Geometric Constraints
Geometric consistency is enforced by constraining the Gaussians' principal axis to align with their nearest neighbors. This ensures that points on the same edge maintain spatial and directional coherence, which is critical for effective edge clustering and fitting.
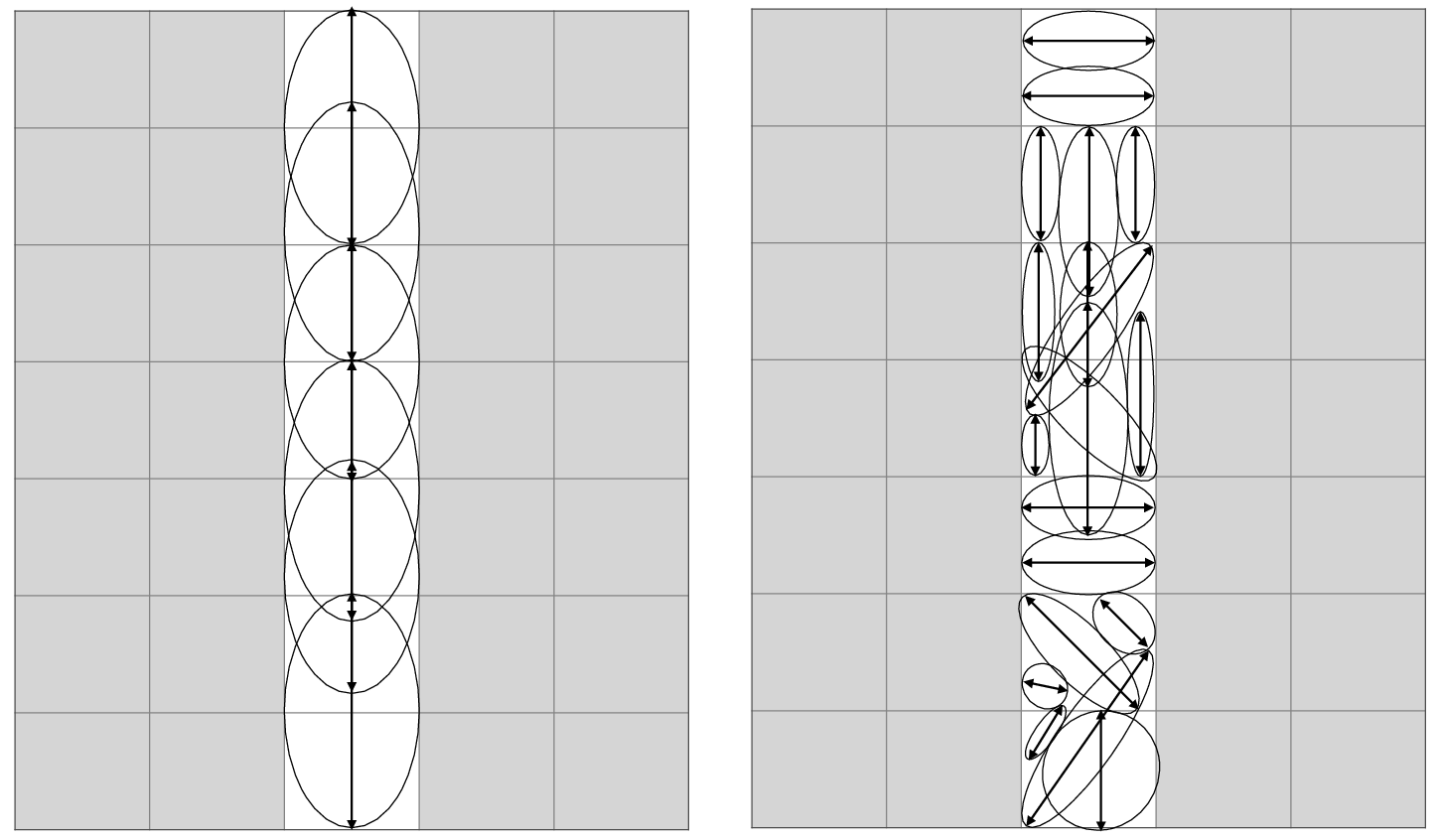
Figure 3: The two geometric criteria for the learned 3D Gaussians.
Implementation and Results
Comparative Analysis
EdgeGaussians demonstrates comparable accuracy to the state-of-the-art while achieving significantly faster runtimes—up to 30 times faster than competing methods like EMAP and NEF. Quantitative evaluations on datasets like ABC-NEF and DTU exhibit the method's superior performance in terms of recall and precision at various error thresholds.
Qualitative evaluations on real-world datasets indicate that EdgeGaussians effectively captures edges with high completeness and minimal duplications compared to competitors.
Conclusion
EdgeGaussians provides a balance of accuracy, efficiency, and simplicity for 3D edge mapping. Its explicit representation approach circumvents the drawbacks associated with implicit sampling and computational expenses, making it suitable for real-time applications. Future work may involve improving supervision methods to further refine accuracy and broaden application scopes.