Contributions to the Algorithmic Foundations of Approximate Lie Symmetry Algebras of Differential Equations
Published 27 Oct 2024 in math-ph, cs.NA, math.MP, and math.NA | (2410.20608v1)
Abstract: Lie symmetry transformations that leave a differential equation invariant play a fundamental role in science and mathematics. Such Lie symmetry groups uniquely determine their Lie symmetry algebras. Exact differential elimination algorithms have been developed to determine the dimension and structure constants of the Lie symmetry algebra of an exact polynomially nonlinear differential equation. Directly applying these symbolic algorithms to approximate models is prone to instability since these algorithms strongly depend on the orderings of the variables involved. This motivates the need to address questions at the algorithmic foundation of approximate Lie symmetry algebras of differential equations. How do we define approximate Lie symmetry? How do we compute and apply approximate Lie symmetry algebras of differential equations? How reliable are the results? To address such questions, we define approximate Lie symmetry algebras in terms of exact Lie symmetry algebras of a nearby differential equation. Our algorithm for identifying these hidden approximate Lie symmetry algebras uses the SVD to find nearby rank-deficient systems combined with approximate geometric involutive forms of the approximate symmetry-defining systems. Our approach is local and depends on an input base point in the space of independent and dependent variables. In general, our local approach can yield many different nearby Lie symmetry algebras. We also outline a numerical approach to determining the approximate isomorphic of such Lie symmetry algebras as the local base point varies across a grid in the base space. We also provide a method for evaluating the reliability of our results. This enables the base space to be partitioned into regions where different local Lie symmetry algebras are admitted, separated by unstable transition regions.
The paper introduces a novel algorithm that defines approximate Lie symmetries via exact symmetries of nearby differential equations.
It combines SVD with involutive completion techniques to compute structure constants and assess accuracy through commutator and Jacobi identity checks.
Experimental results on a second-order ODE demonstrate symmetry dimension variations and validate the method's robustness across tolerance levels.
Algorithmic Foundations of Approximate Lie Symmetry Algebras
This paper introduces algorithmic approaches for computing approximate Lie symmetry algebras of differential equations (DEs), addressing the challenges posed by models with approximate parameters where exact symmetry methods are unstable. The core idea is to define approximate Lie symmetry in terms of exact Lie symmetry of a nearby DE, leveraging numerical methods like SVD and approximate geometric involutive forms to identify these symmetries. The paper also outlines a numerical method for assessing the reliability of the computed approximate Lie symmetry algebras across varying base points.
Defining Approximate Lie Symmetry
The paper defines approximate Lie symmetry of a DE, R, in terms of exact symmetry of a nearby exact DE, R~, within a neighborhood of a point (x0,u0) in the space of independent and dependent variables. R is considered approximately invariant under a Lie symmetry algebra L~ if there exists a nearby R~ that is exactly invariant under L~. This framework allows for the application of exact symmetry techniques to approximate systems by finding a close exact representation.
Completion to Involutive Form
The authors employ the Cartan-Kuranishi algorithm, combined with SVD, to analyze the Lie symmetry defining systems. Any linear homogeneous differential system R can be written in matrix form, Aq(x)qv=0, where Aq is a matrix of coefficients and qv is a column vector of partial derivatives up to order q. The SVD is applied to the coefficient matrices Aq(x0) evaluated at a random point x=x0 to compute the null spaces.
The algorithm prolongs the system:
Aq(x)qv=0,Aq+1(x)q+1v=0,Aq+2(x)q+2v=0,⋯
Then projects the systems πrDkR, where r=0,1,…,k, for each prolongation DkR. The projection π on the vector qv∈Jq, denoted πqv∈Jq−l, is obtained by removing the coordinates of qv corresponding to derivatives of order q.
Singular values below a user-defined tolerance are set to zero, yielding an approximate basis for the kernel of the prolonged matrix. This numerical approach allows for the handling of approximate systems where exact symbolic methods would fail.
Determining Structure Coefficients
The structure constants cijk of the Lie symmetry algebra are numerically approximated using the defining system R. Leveraging the Cartan-Kuranishi prolongation theorem [CarKura], the algorithm extends the system to an involutive form. Derivatives up to order q′+1 are computed to ensure the system remains uniquely determined by neighboring involutive systems. The SVD is computed at a random point z0:
A(q+k′)(z0)=UΣVT
Singular values smaller than a tolerance T are replaced by zeros, resulting in a nearby matrix A′. The columns of V0 form an orthogonal basis for the numerical null space of A(q+k′)(z0). We project these vectors to obtain πℓV0={πℓ(v):v∈V0} by removing coordinates corresponding to derivatives of order >q′.
Each basis vector vi(q′+1) uniquely determines a local symmetry vector field Xi=ζij∂/∂zj. The vector fields close under the Lie bracket, giving the structure constants cijk as: cijk=⟨vk(q′),wij(q′)⟩
where wij(q′) represents the components of the Lie bracket for the vector fields Xi and Xj.
Assessing Reliability
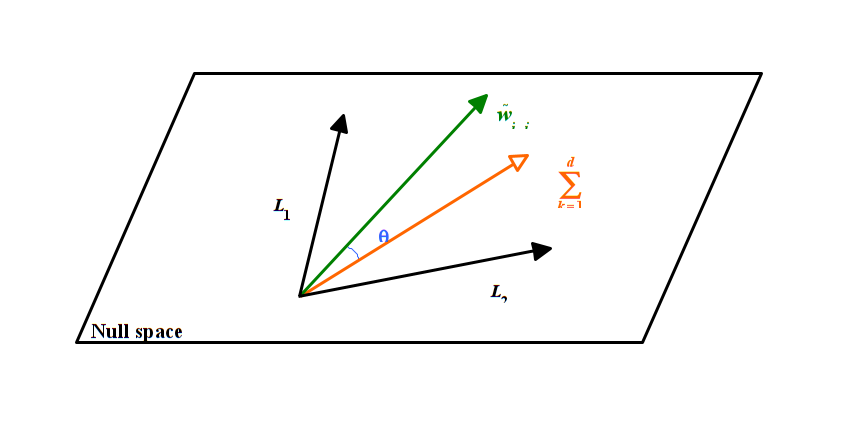
The reliability of the approximate Lie algebra results is assessed by evaluating how closely the computed commutators lie within the null space. Due to floating-point computations, the numerical commutator may deviate from the null space, forming a small angle θ (Figure 1).
Figure 1: The figure illustrates that the commutator computed from SVD may not be exactly on the null space due to computational errors.
To quantify this, the absolute error is calculated as:
∥wij−w~ij∥=k∑cijkVk−w~ij
where wij is a linear combination of Vk that should be on the null space, and w~ij is directly calculated but may not be exactly on the null space. The relative error, $\sigma_{\mbox{Lie}}(w)$, provides a normalized measure of this deviation:
The Jacobi identity is also used as a measure of reliability:
[Li,[Lj,Lk]]+[Lj,[Lk,Li]]+[Lk,[Li,Lj]]=0
A suitable norm of the Jacobi identity, denoted as $\sigma_{\mbox{Jacobi}}$, is computed using SVD to further validate the accuracy of the approximate symmetries.
Experimental Results
The algorithms were applied to a second-order ODE with an added Gaussian function:
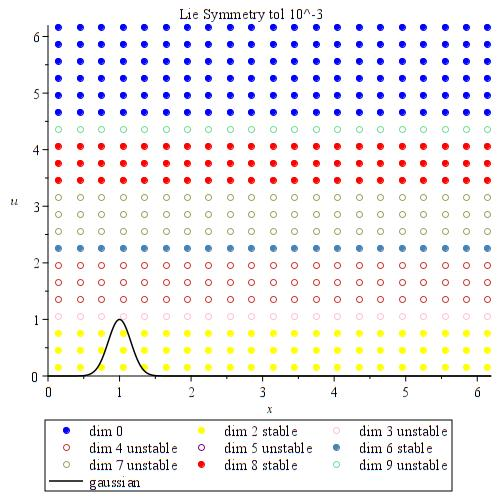
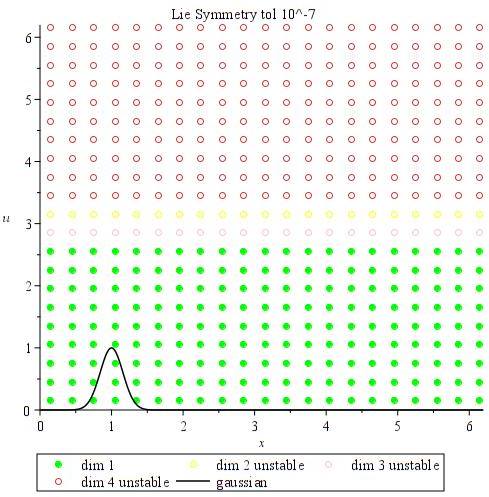
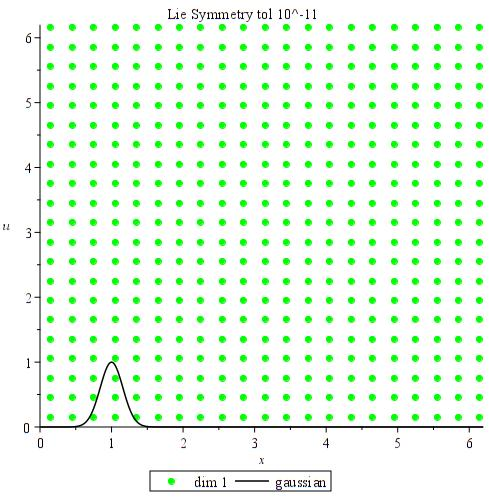
The results show that the dimension of the approximate Lie symmetry varies depending on the location in the (x,u) plane and the chosen tolerance. Figures 2, 3, and 4 illustrate the dimension plots for tolerances of 10−3, 10−7, and 10−11, respectively.
Figure 2: Dimension plot with tolerance 10−3 across the domain x=0..5, u=0..5.
Figure 3: Dimension plot with tolerance 10−7 across the domain x=0..5, u=0..5.
Figure 4: Dimension plot with tolerance 10−11 across the domain x=0..5, u=0..5.
At a tolerance of 10−3, distinct regions with different dimensions are apparent (Figure 2). Points near the Gaussian function exhibit a 2-dimensional symmetry, corresponding to the exact symmetry of the ODE without the Gaussian term. Regions far from the Gaussian function return to 0-dimensional symmetry due to the impact of the u(x)3 term. As the tolerance decreases to 10−7 (Figure 3), only a 1-dimensional stable area remains. With a very small tolerance of 10−11 (Figure 4), more points share the same approximate Lie symmetry as the exact symmetry.
Extending Regions of Validity
The paper proposes extending the algorithm to a grid of points (x0,u0) and partitioning the space based on Lie algebra isomorphism. An equivalence relation P∼P∗ is defined for points (x0,u0)∼(x0∗,u0∗) if dim(L)=dim(L∗) and there is a change of basis taking L into L∗.
The numerical testing of Lie algebra isomorphism uses equations between structure constants for L and L∗:
{k=1∑nzksaijk−k=1∑nl=1∑nzikzjlbkls=0,1≤i<j≤n,s=1,…,n,1−zdet[ϕ]=0(z∈Fas a new unknown)
These equations, along with numerical algebraic geometry methods, are used to determine the isomorphism of approximate structure constants, avoiding the expensive determinant term.
Conclusion
This paper presents a novel approach to computing approximate Lie symmetry algebras for DEs, defining such symmetries in terms of exact symmetries of nearby systems. By employing SVD and involutive completion techniques, the authors develop a practical algorithm for identifying and analyzing approximate symmetries. The reliability measures, based on commutator deviations and the Jacobi identity, provide a means to assess the quality of the computed symmetries. The experimental results demonstrate the algorithm's effectiveness in analyzing a second-order ODE, revealing the dependence of symmetry dimensions on location and tolerance. The extension to partitioning the space based on Lie algebra isomorphism offers a promising direction for future research, enabling a more comprehensive understanding of approximate symmetries in DEs.