- The paper introduces an integrated mathematical framework that unifies NP-hard multi-agent path planning, Crow-AMSAA reliability models, and ODD metrics to project realistic AV deployment timelines.
- It reveals that even with aggressive pruning, compute demands remain several orders above current automotive hardware, extending readiness gaps by 20–35 years for consumer applications.
- The study emphasizes that realistic Level 5 deployment relies on simultaneous breakthroughs in computational scaling, statistical reliability, and optimized regulatory production cycles across diverse domains.
Integrated Quantitative Analysis of Autonomous Vehicle Timelines
Mathematical Framework Unifying Complexity, Reliability, and ODDs
This work introduces an integrative quantitative framework that synthesizes computational complexity theory, reliability growth modeling, and operational design domain (ODD) metrics for autonomous vehicle (AV) deployment timelines. The paper establishes that historically independent factors—such as the NP-hardness of multi-agent path planning, Crow-AMSAA reliability curves, and ODD modeling—must be considered simultaneously to yield realistic projections for Level 5 autonomy across various application domains.
The analysis begins by formalizing the state-space explosion in complex traffic environments. With conservative assumptions (e.g., 50–60 dynamic agents, each described by 10 discretized parameters at 100 levels), the effective configuration space rapidly exceeds 101000, highlighting the intractability of brute-force planning even with hypothetical hardware. Multi-agent path finding (MAPF) is explicitly characterized as NP-hard, where naive exact approaches would require up to 1019 operations per 100 ms planning cycle for highly interactive, dense urban ODDs.
Domain-specific compute demand is then systematically reduced through multiplicitous pruning factors (χ), accounting for active object limitation, temporal slicing, coarse modeling, local planning, and ODD restrictions. The effective compute demand for next-generation consumer AVs remains at least three orders of magnitude above current automotive-embedded hardware even after aggressive pruning. Modeling hardware progression with a 2.5-year Moore's Law doubling time, the compute shortfall translates to a readiness gap of 20–35 years for Level 5 in unconstrained environments.
Alongside computational feasibility, the paper outlines rigorous statistical reliability demonstration using the Crow-AMSAA power-law and Poisson zero-failure confidence models. For human-level fatality rates (%%%%3%%%% per mile) and realistic reliability growth exponents (β∈[0.3,0.5]), required test mileage can grow super-polynomially, implicating multi-decade campaigns for domains with high intrinsic risk and broad scenario coverage.
This dual perspective is further parameterized by ODD complexity (γ) and reduction (δ) factors, yielding effective operational scenario weights across application classes. Final deployment timelines are determined by the strict maximum of hardware/algorithmic and reliability demonstration bottlenecks, plus additive production/regulatory cycles (Tprod+reg), defined as
Ttotal=max(Tcomp,Trel)+Tprod+reg
with additional serial/parallelization strategies for hybrid test programs.
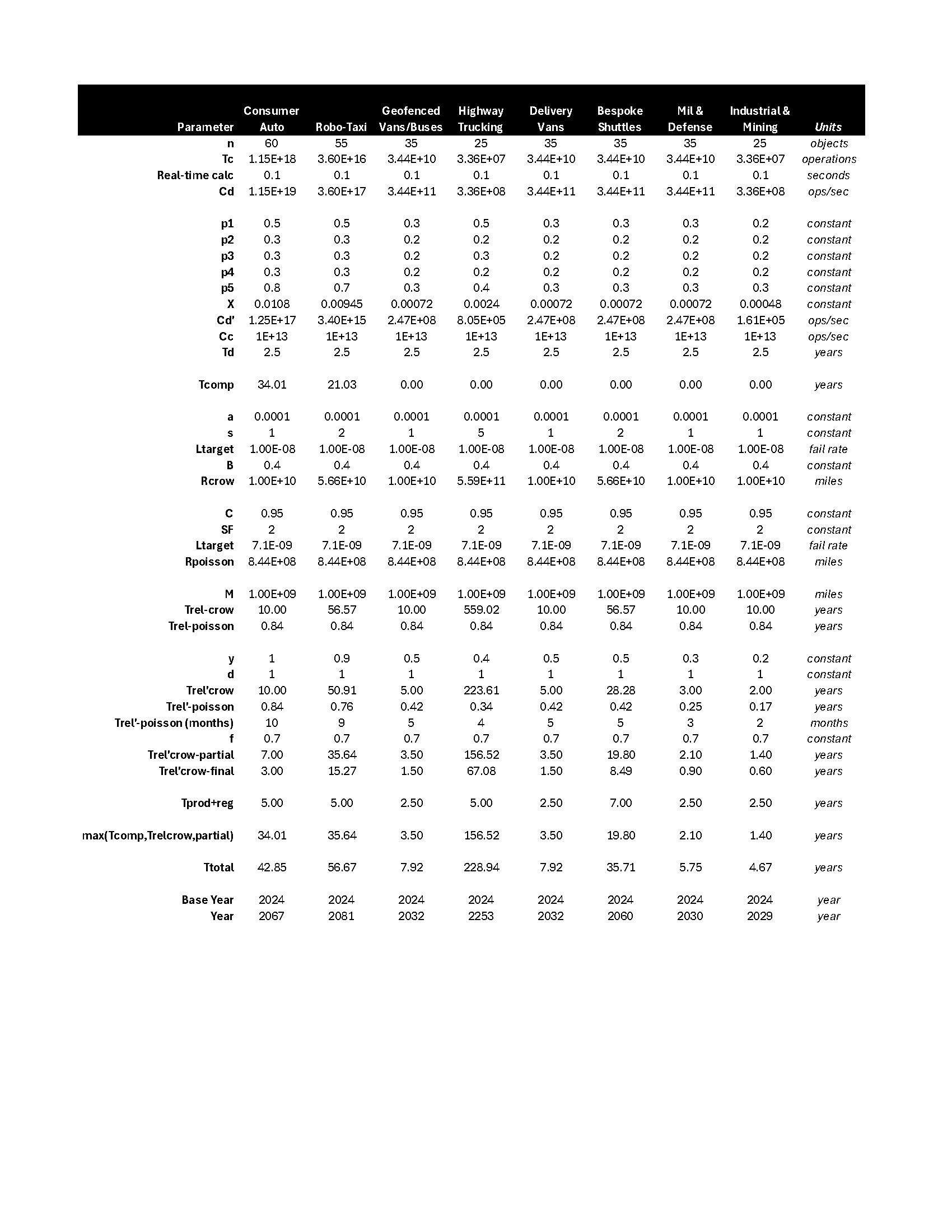
Figure 1: Projected Level 5 deployment timelines—with breakdown by application category, calculation of partial/serial reliability growth and compute/HPC ramp-up windows, and explicit bottlenecks for each domain.
Category-Resolved Results and Stage-Based Milestones
Quantitative estimates for Level 5 deployment are produced for: (1) industrial/mining, (2) military/defense, (3) delivery vans, (4) geo-fenced vans/buses, (5) bespoke shuttles, (6) consumer automotive, (7) robo-taxis, and (8) highway trucking. Each is evaluated with domain-specific n, s, γ, δ, χ, and test capacity M reflectors. Timelines are resolved for two key thresholds: Stage 2 (minimal remote/intervention, revenue service) and Stage 3 (broad, human-competitive commercial deployment).
Key findings:
- Industrial/mining and military/defense AVs (ODDs: restricted, low-complexity, moderate severity) are projected to reach broad Level 5 deployment within 5–6 years given aggregate test and compute scaling.
- Delivery van and geo-fenced passenger domains may reach Level 5 within a decade; reduced ODD scope and severity minimize both reliability and hardware barriers.
- Bespoke shuttles exhibit extended timelines (20–35 years), limited primarily by severity factors, regulatory delays, and additional production cycles.
- Consumer automotive deployment is significantly delayed (30–40+ years), predominantly by state-space/edge-case diversity and high scenario count for reliability proof, even under aggressive simulation scaling.
- Robo-taxis, with dense-urban ODDs and higher incident severity, yield even longer projections (over 55 years to broad deployment).
- Highway trucking (high severity, high speed, high mass) results in prohibitive reliability timelines (200+ years without dedicated infrastructure or discontinuous breakthrough on risk containment).
The final ordering highlights that domains with limited ODDs, moderate severity, and controllable environments (industrial/mining, defense) will mature substantially earlier than open-consumer or high-mass vehicular domains.
Implications for Research, Industry, and Policy
The system-level synthesis highlights several critical implications:
- Simultaneity of Bottlenecks: Any projection that isolates either algorithmic or reliability constraints alone will underestimate true deployment timelines. Real-world rollout is governed by the strictest among hardware, software, and statistical demonstration constraints.
- Exponential Scaling Penalty: Both computational tractability and reliability proof requirements scale superlinearly with scenario diversity (n, γ), pushing broad ODDs far past conventional planning horizons.
- Diminishing Returns in Test/Simulation: Even with simulation advances, corner-case discovery and risk assurance for high-severity applications cannot be linearly compressed without breakthroughs in scenario-modeling or purpose-built infrastructure.
- ODD Engineering: Highly constrained, engineered ODDs can substantially accelerate deployment for niche domains, while full unconstrained operation will continue to lag regardless of incremental ML or sensor advances.
- Direction for Disruptive Acceleration: Only discontinuous progress—quantum/optical computing, AI-specific acceleration, infrastructure-to-vehicle integration, or radical regulatory change—can meaningfully reduce these timelines for high-severity, high-complexity domains.
Limitations and Future Directions
Major sources of timeline uncertainty include:
- Limited empirical data for precise calibration of Crow-AMSAA constants (α, β) and real-world effective χ, γ.
- Potential underestimation of ML generalization improvements, simulation fidelity, or scenario-generation breakthroughs.
- Incomplete modeling of sociotechnical or regulatory shocks (such as mandatory V2X infrastructure) that could significantly alter Trel or Tprod+reg in specific markets.
Future work should prioritize empirical fit of reliability curves, more robust quantification of ODD complexity, and investigation of synergies between regulatory/infrastructure investment and reliability/HPC acceleration.
Conclusion
This work provides a rigorous, multi-factorial baseline for realistic Level 5 autonomous vehicle timeline estimation. By requiring concurrency of computational and statistical reliability milestones—and accounting for ODD and severity heterogeneity—it challenges overly optimistic forecasts and establishes a transparent, tunable modeling foundation for tracking AV development progress across use cases.