- The paper proposes DyTR, a Transformer-based residual correction approach that significantly reduces prediction errors by up to 92.3% compared to baseline models.
- The method combines deep learning with physics-based models by using historical vehicle states and control signals to accurately forecast dynamics.
- Experimental results show that DyTR robustly generalizes across diverse driving conditions and vehicle configurations for reliable long-term predictions.
Introduction
The paper "Residual Learning towards High-fidelity Vehicle Dynamics Modeling with Transformer" (2502.11800) focuses on improving vehicle dynamics modeling, a critical aspect for autonomous driving (AD) technologies. Traditional physics-based models often fall short in capturing complex vehicular dynamics due to inherent simplifications. Although deep learning (DL) models can improve these estimations, they struggle with generalization and prediction accuracy in long-term scenarios. This work proposes a novel residual correction system utilizing a Transformer-based architecture, termed DyTR, that refines estimates made by physics-based models, resulting in significant improvements in prediction accuracy.
Methodology
Vehicle dynamics modeling aims to predict future states of vehicles accurately. The conventional approach involves physics-based models like the 3 DoF and 14 DoF models, which often lack precision due to simplifications. The paper introduces a novel Dynamic Residual Correction (DRC) framework which employs a deep neural network (DNN) to adjust the estimations of a base physical model rather than directly predicting the dynamics itself.
In particular, the base model calculates future states, which are then corrected by predicting residuals using historical data and vehicle configurations. The relationship between real and predicted dynamics is formalized as:
δ=s−s^
where s is the real state and s^ is the estimated state by the base model.
Data Generation
Due to the lack of extensive vehicle dynamics datasets, the authors used a co-simulation approach involving MATLAB and CarSim to generate real and estimated vehicle states across different scenarios. This dataset serves to train and evaluate the proposed DRC framework.
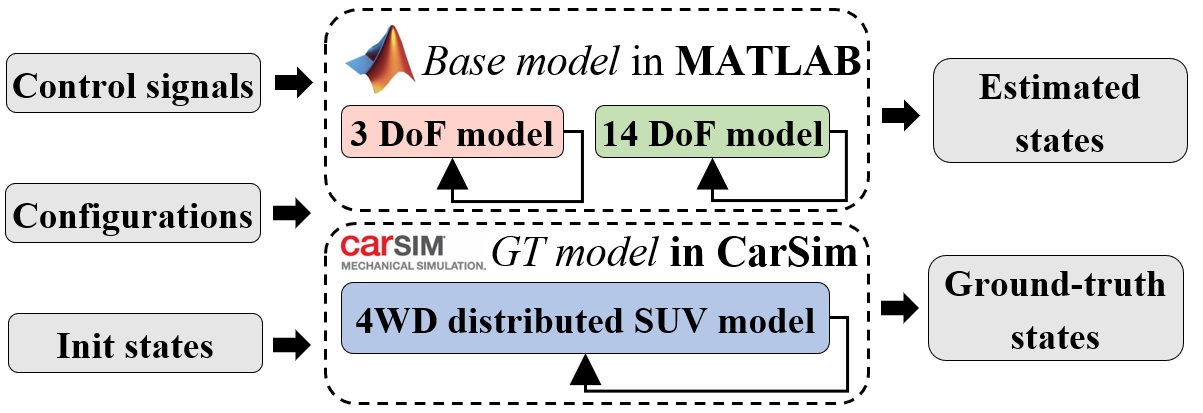
Figure 1: The diagram of data generation pipeline through co-simulation by MATLAB and CarSim.
DyTR Network Structure
The DyTR model enhances the Transformer architecture by incorporating a dynamics residual query system. This involves encoding a sequence of historical vehicle dynamics and control signals, which the Transformer processes to refine the estimated state:
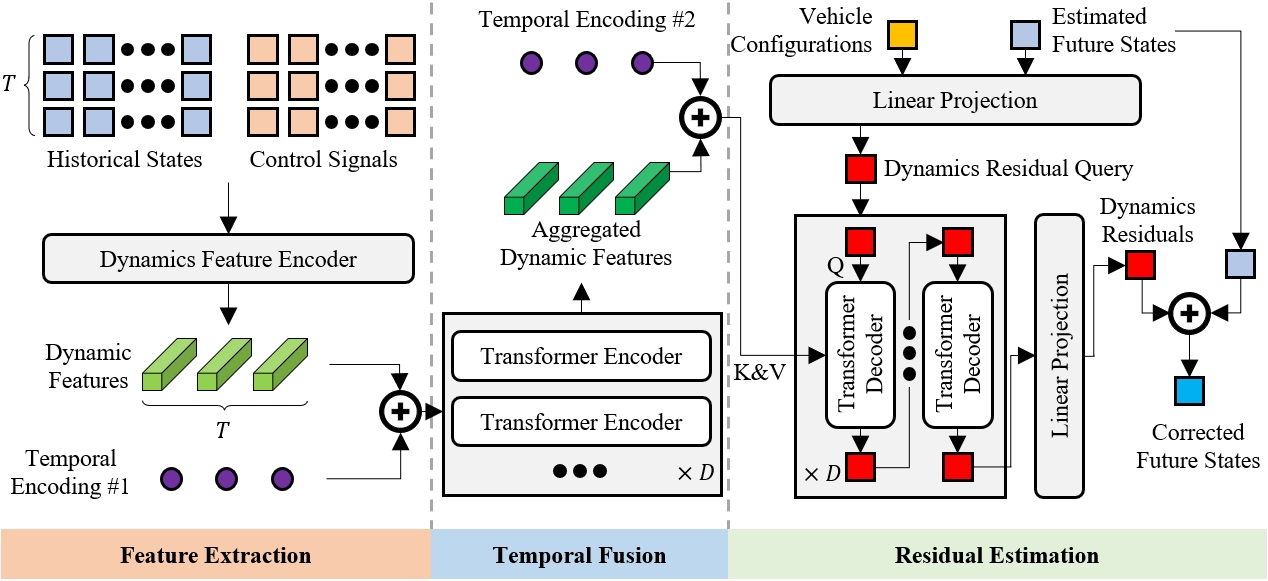
Figure 2: The network structure of our proposed Transformer-based DRC model, DyTR. The model takes historical T-step states, T-step control signals, vehicle configurations, and estimated future states by the base model as input, and estimates the residuals of dynamics states.
- Feature Extraction: The model extracts dynamics features from control signals and estimated states, projecting them into high-dimensional spaces.
- Temporal Fusion: Temporal Transformer Encoder integrates these features while maintaining their temporal order.
- Residual Estimation: A Transformer Decoder iteratively updates a high-dimensional dynamics residual query, allowing the system to predict residuals with higher accuracy.
Experimental Results
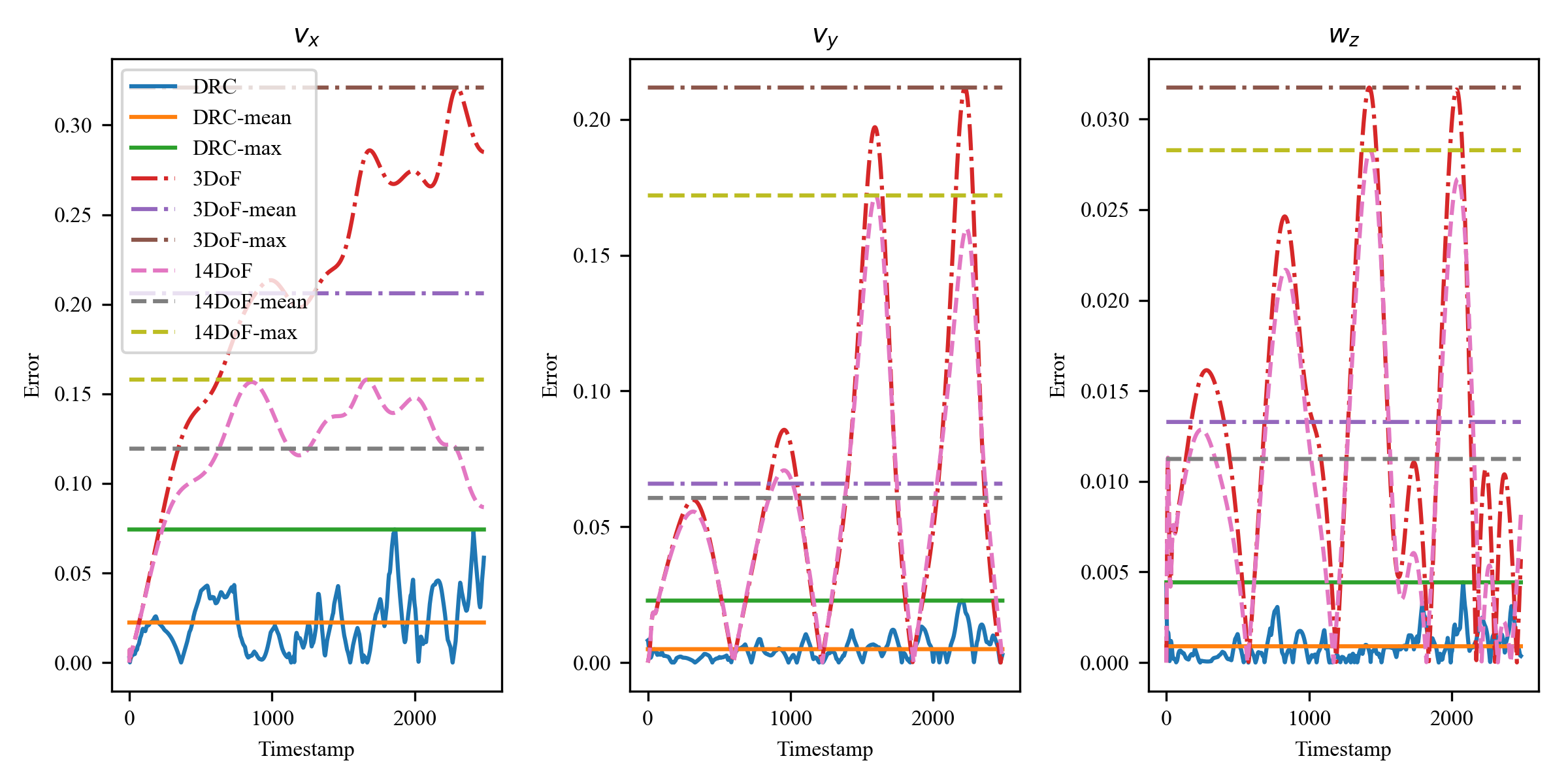
The experiments extensively validate DyTR against both simple physical models and conventional DNN-based methods:
Ablation Studies
Ablation studies highlight the importance of key parameters and architectural choices:
- Temporal Length: Optimal performance observed at a temporal length of 15, balancing information capture and model complexity.
- Transformer Layers: A depth of 2 layers in the Transformer modules was found to provide the best trade-off between accuracy and computational efficiency.
- Residual Query Design: Incorporating both the base model's predictions and vehicle configurations enhances the model's adaptability to varying conditions.
Conclusion
This research introduces a transformative approach to vehicle dynamics modeling through the DyTR network. By effectively utilizing a Transformer-based framework within a DRC scheme, this model provides high-fidelity state predictions essential for advanced AD functionalities. Future directions could explore further optimizations in network architectures and expand to real-world vehicular datasets to ensure seamless transitions from simulated environments to practical applications.