- The paper introduces a kernel-regularized learning framework to optimize feedforward control for LPV systems, reducing RMS error by 43%.
- The approach leverages kernel-based estimation with iterative learning control to refine control parameters from empirical data.
- Experimental validation on a belt-driven carriage system demonstrates significant error minimization through periodic kernel function design.
Parameter-Varying Feedforward Control: A Kernel-Based Learning Approach
Introduction
The research paper addresses the challenges associated with the precise tracking performance of control systems in the presence of parameter variations. The study proposes a novel data-driven approach for the direct learning of parameter-varying feedforward control, particularly for linear parameter-varying (LPV) dynamics. This approach leverages kernel-regularized function estimation combined with iterative learning techniques to optimize feedforward control from empirical data. The framework is validated through experimental application on a belt-driven carriage system, which is an exemplary architecture in mechatronics featuring position-dependency.
Methodology
The study begins by setting the stage with LPV system dynamics and expounds on the inherent complexities in the feedforward control of such systems. These systems typically require dynamic compensation mechanisms due to their position- or time-varying nature, depicted through the photo and schematic views of the experimental setup.

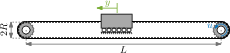
Figure 1: Photograph of experimental setup.
The belt-driven carriage is plagued by various disturbances, including position-dependent friction and drivetrain stiffness, motivating the need for advanced control strategies. Feedforward control aims to mitigate these disturbances by preemptively countering them, thereby enhancing system accuracy.
Kernel-Regularized Learning
The researchers present a kernel-regularized estimation strategy designed not to restrict solutions to predefined structures, instead utilizing a potentially infinite-dimensional function space. This method allows the incorporation of system insights through kernel designs, capturing complexities such as periodicity.
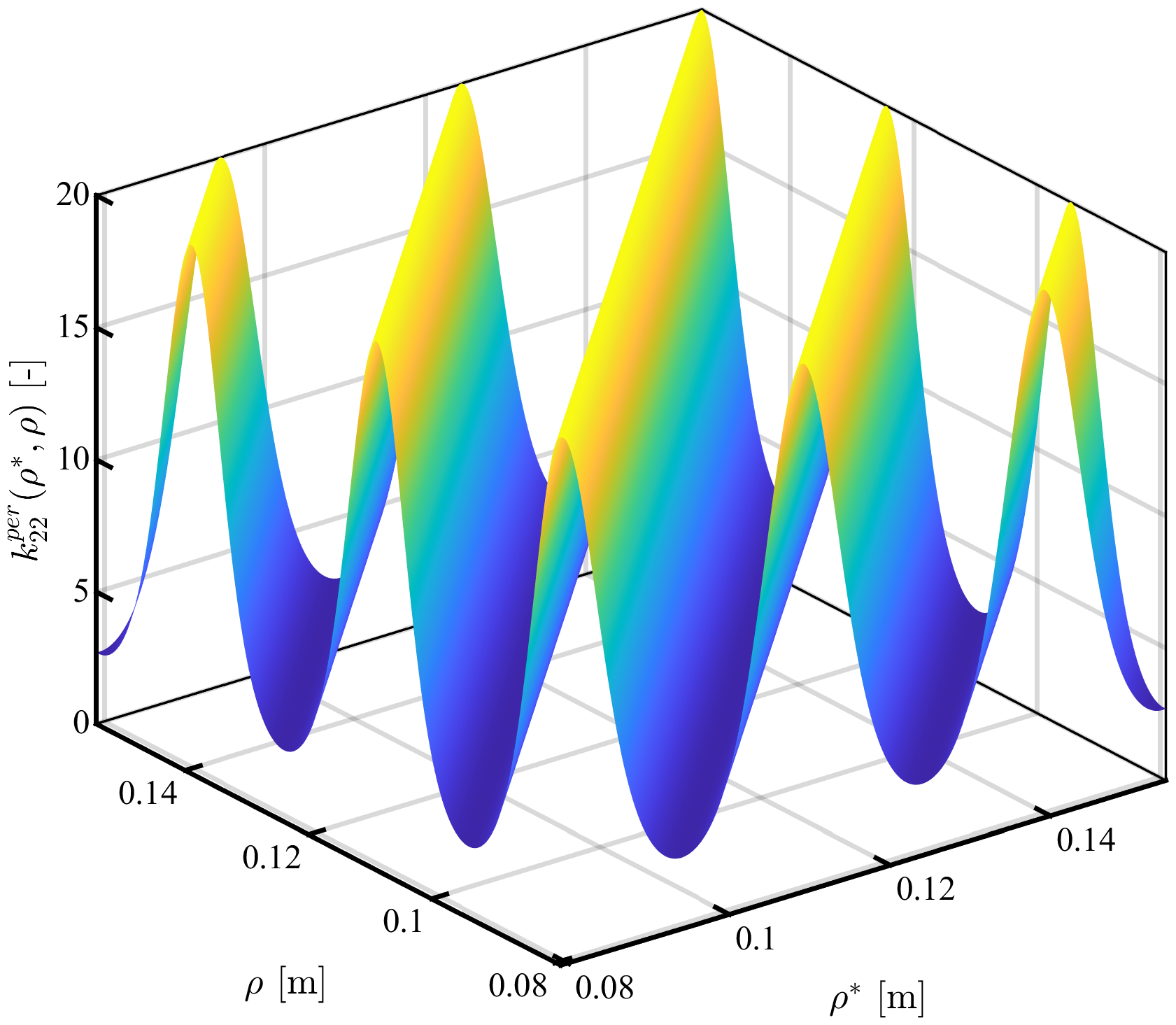
Figure 2: Surface plot of kernel function k22.
The periodic kernel used, for instance, enforces smooth and periodic functions in the LPV parameters, making it ideal for systems exhibiting periodic disturbances.
Iterative Learning Control
Central to the research is an iterative learning control (ILC) framework that refines feedforward parameters by minimizing predictive errors iteratively. This process iteratively updates the parameter functions, effectively reducing tracking errors trial by trial, leveraging data from previous iterations to enhance the predictive control law's accuracy.
Implementation Procedure
Procedure details encapsulate initializing parameter functions devoid of preset conditions, conducting trial-based adjustments, recalibrating based on error predictions, and adopting a structured update protocol. A key aspect of this approach lies in the judicious selection of kernel functions that align with the observed behavior of the control system.
Experimental Validation
Experimental results are conducted on a belt-driven carriage with significant position-dependent dynamics. These experiments demonstrate that the proposed method is superior in reducing tracking errors compared to traditional LTI feedforward controllers.
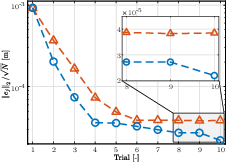
Figure 3: The RMS error during constant velocity converges faster and to a lower value for the developed iterative kernel-regularized estimates of LPV parameters.
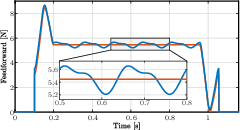
Figure 4: The feedforward signal during the final trial f10.
The iterative kernel-regularized approach notably reduces the root-mean-square error by 43%, marked by a significant cleaning of periodic error components as confirmed through spectral analysis.
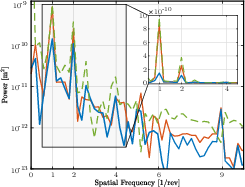
Figure 5: The power of the tracking error for the final trial $e_{10}.
”
The figures illustrate the clear advantages in employing kernel-regularized learning for error minimization, leveraging spatial periodic awareness translated to superior feedback mechanisms.
Conclusions
The kernel-based learning framework for parameter-varying feedforward control showcases potential for substantial performance improvements in LPV systems. By not binding the feedforward parameter functions to preset models, the approach advances utilization of measured environmental and system variables, furnishing scalable application potential across varied high-precision mechatronic environments. Future directions may explore broader deployment across more diverse LPV systems and explore potential kernel enhancements for even more refined control fidelity.