On the determinant of the walk matrix of the rooted product with a path
Abstract: For an $n$-vertex graph $G$, the walk matrix of $G$, denoted by $W(G)$, is the matrix $[e,A(G)e,\ldots,(A(G)){n-1}e]$, where $A(G)$ is the adjacency matrix of $G$ and $e$ is the all-ones vector. For two integers $m$ and $\ell$ with $1\le \ell\le (m+1)/2$, let $G\circ P_m{(\ell)}$ be the rooted product of $G$ and the path $P_m$ taking the $\ell$-th vertex of $P_m$ as the root, i.e., $G\circ P_m{(\ell)}$ is a graph obtained from $G$ and $n$ copies of the path $P_m$ by identifying the $i$-th vertex of $G$ with the $\ell$-th vertex (the root vertex) of the $i$-th copy of $P_m$ for each $i$. We prove that, $\det W(G\circ P_m{(\ell)})$ equals $\pm (\det A(G)){\lfloor\frac{m}{2}\rfloor}(\det W(G))m$ if $\gcd(\ell,m+1)=1$, and equals 0 otherwise. This extends a recent result established in [Wang et al. Linear Multilinear Algebra 72 (2024): 828--840] which corresponds to the special case $\ell=1$. As a direct application, we prove that if $G$ satisfies $\det A(G)=\pm 1$ and $\det W(G)=\pm 2{\lfloor n/2\rfloor}$, then for any sequence of integer pairs $(m_i,\ell_i)$ with $\gcd(\ell_i,m_i+1)=1$ for each $i$, all the graphs in the family \begin{equation*} G\circ P_{m_1}{(\ell_1)}, (G\circ P_{m_1}{(\ell_1)})\circ P_{m_2}{(\ell_2)}, ((G\circ P_{m_1}{(\ell_1)})\circ P_{m_2}{(\ell_2)})\circ P_{m_3}{(\ell_3)},\ldots \end{equation*} are determined by their generalized spectrum.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
A simple explanation of “On the determinant of the walk matrix of the rooted product with a path”
What is this paper about?
This paper studies how a certain “fingerprint number” of a graph changes when you attach a chain of vertices (a path) to every vertex of the graph in a specific way. That fingerprint number is the determinant of the walk matrix. The authors find a clean formula for this number and show how it helps build big graphs that are uniquely identified by their spectra (their lists of special numbers called eigenvalues).
Key ideas you need to know first
- A graph is a set of points (vertices) with lines (edges) connecting some pairs.
- The adjacency matrix records which vertices are connected: if and are connected, otherwise $0$.
- The walk matrix is built from how many ways you can walk from each vertex in 1 step, 2 steps, and so on:
- , where is the all-ones column vector and is the number of vertices.
- Think of the columns as “how many walks of length k start at each vertex.”
- The determinant of a matrix is a single number that, among other things, says if the matrix is invertible (nonzero determinant) or not (zero determinant). It often behaves like a strong “summary” feature of the matrix.
- A path is just a chain of vertices in a line.
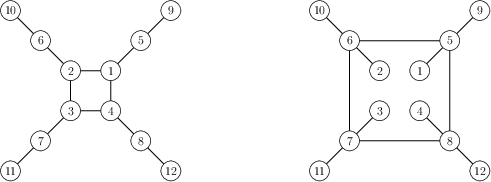
- The rooted product means you attach a copy of the chain to every vertex of , gluing it at the -th vertex of the chain. If , you glue at an end; if is bigger, you glue somewhere in the middle.
- The greatest common divisor is the largest number that divides both and .
What is the main goal?
The paper answers: if we take a graph and attach a path of vertices at position to every vertex (forming ), what is the determinant of the walk matrix of this new big graph, in terms of the original ?
They also ask: when does this process create graphs that are uniquely determined by their generalized spectrum (the spectra of the graph and its complement)? Such graphs are called DGS (Determined by their Generalized Spectrum).
How do the authors approach the problem?
- They express the adjacency matrix of the rooted product neatly using the Kronecker product (a way of combining matrices like tiling a pattern).
- They analyze eigenvalues and eigenvectors (the special directions and scaling factors of the matrix action) of the new graph using known properties of paths. Here, Chebyshev polynomials of the second kind (special polynomials that describe paths) play a central role.
- They prove a key condition: the eigenvalues of the big graph are all simple (no repeats) if and only if . This matters because repeated eigenvalues often force the determinant of the walk matrix to be zero.
- They compute the big determinant by:
- Relating it to products of differences between roots (Vandermonde-type products),
- Using resultants (a tool that multiplies differences between roots of two polynomials),
- And carefully simplifying with identities from Chebyshev polynomials.
In short, they translate the graph problem into a polynomial problem, solve it with algebra, then translate back.
What are the main results?
The core formula is:
What this means in plain language:
- If the glue position and share no common factor other than 1, then the determinant of the walk matrix of the big graph is just a simple power of the original numbers and . That’s a remarkably clean rule.
- If they do share a factor, the determinant is zero. Intuitively, that means the new graph’s walk matrix loses information (it’s not invertible), often because of hidden symmetries or repeated eigenvalues.
This result generalizes a recent earlier result that only covered the case (gluing at the end of the path). Now it works for any glue position in the first half of the path.
A key application:
- If has and (this is a special, but important class of graphs), then by repeatedly attaching paths at positions with , every graph you build this way is DGS. That means each is uniquely pinned down by its generalized spectrum—no other non-isomorphic graph shares the same spectral data. This gives a method to build many new, large, uniquely identifiable graphs from a small seed.
Why is this important?
- It gives a precise, easy-to-use formula for a complicated graph construction. That makes it possible to predict the behavior of large networks built in a structured way.
- It extends our toolbox for constructing DGS graphs. DGS graphs are valuable in areas like network science and chemistry, where you want to be sure a structure is uniquely determined by spectral measurements.
- The gcd condition is simple to check but has powerful consequences: it’s the switch between a clean, nonzero determinant and zero.
Big-picture impact
- The paper provides a scalable recipe: start with a “good” graph (with and ), and keep attaching paths at allowed positions (those with ). Every step preserves the property of being uniquely identifiable by spectrum. This is like growing a family tree of graphs that remain distinguishable even as they get large and complex.
- The techniques combine graph theory with algebra and special polynomials, showing how different areas of math fit together to solve structural problems about networks.
A small sanity check example
- Suppose and you glue at . Then , and . The theorem says . In other words, gluing in the middle of a path of length 3 forces the walk matrix to lose invertibility.
- If you instead glue at for any , and is nice, you get the clean nonzero formula and can keep building DGS graphs.
Overall, the paper deepens our understanding of how graph “fingerprints” behave under a common graph-building operation and gives a practical way to construct many uniquely identifiable graphs.
Collections
Sign up for free to add this paper to one or more collections.