- The paper introduces a novel ISAC framework using EMLSR for target tracking, integrating non-cooperative and cooperative resource allocation strategies.
- It employs a Kalman filter and a k-candidates heuristic to optimize STA MLD selection for accurate trilateration while balancing sensing and throughput trade-offs.
- Simulation results demonstrate diminishing returns beyond k=4 and show that cooperative approaches achieve near-optimal sensing accuracy with moderate throughput loss.
Target Tracking with ISAC Using EMLSR in Next-Generation IEEE 802.11 WLANs: Approaches and Insights
This paper introduces and systematically explores the combination of Enhanced Multi-Link Single-Radio (EMLSR) operation—central to IEEE 802.11be (Wi-Fi 7)—and Integrated Sensing and Communications (ISAC) as set forth in IEEE 802.11bf, with a particular focus on target tracking in next-generation Wi-Fi networks. The authors develop a rigorous mathematical and algorithmic framework for ISAC-enabled target tracking and formulate both non-cooperative and cooperative strategies for resource allocation and decision-making. Simulation results validate performance trade-offs, highlighting key design considerations for joint sensing and communications in multi-link Wi-Fi scenarios.
The network model consists of one Access Point Multi-Link Device (AP MLD), multiple Station MLDs (STA MLDs), and a mobile target, all equipped with L interfaces operating over distinct frequency bands (see (Figure 1)). EMLSR operation grants each interface individual transmit opportunities (TXOPs), and the IEEE 802.11bf amendment allows these TXOPs to be used flexibly for either communications or sensing.
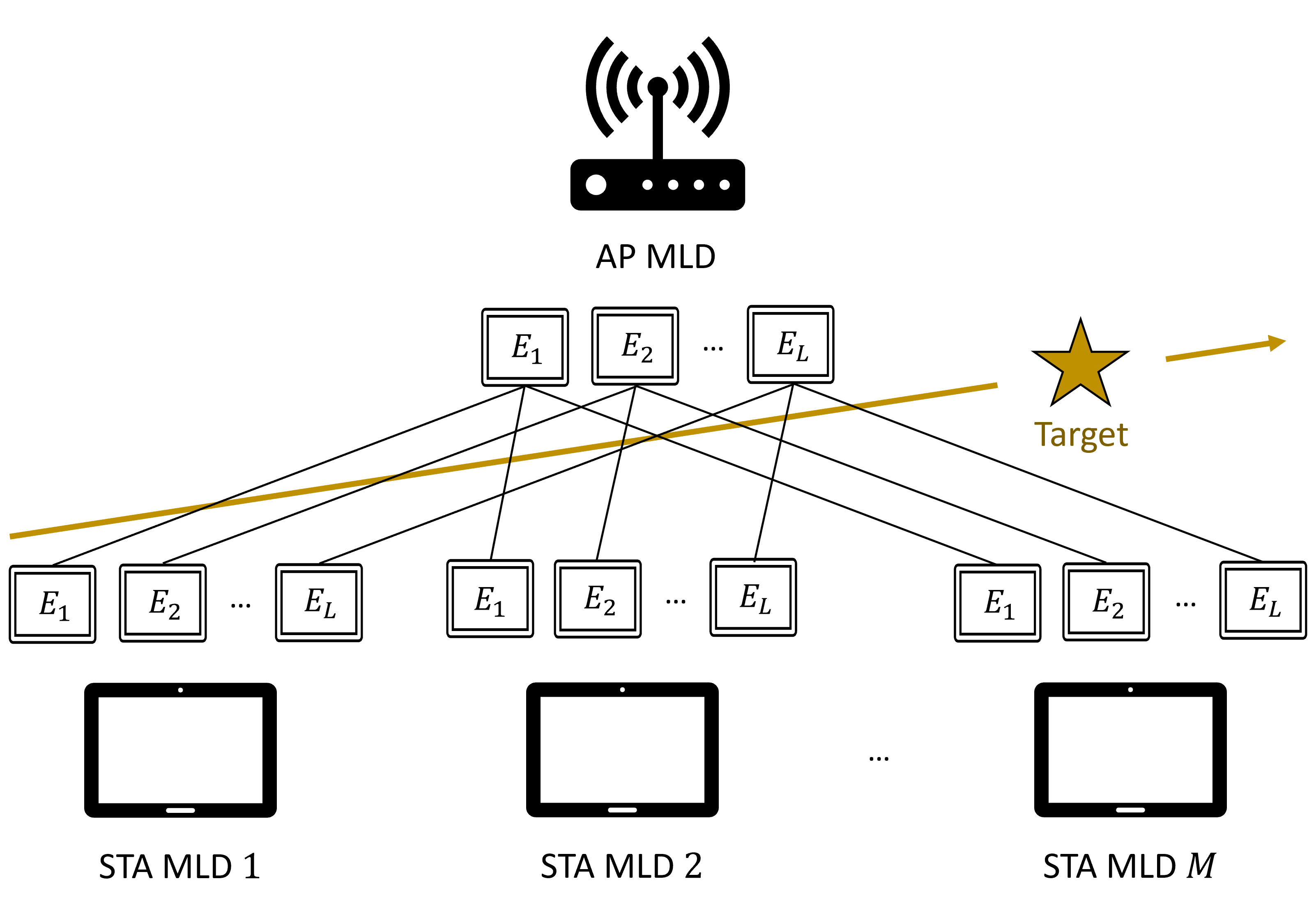
Figure 1: An illustration of Wi-Fi network, where El represents the lth interface and each solid line between interfaces represents a link.
The target tracking problem is cast as a sequential decision-making process at each TXOP. For each TXOP at time t, the AP MLD must: (1) make an ISAC decision—predict the target state and choose between sensing and communications, and (2) select a subset of STA MLDs for uplink (UL) sensing (for target localization via trilateration) or downlink (DL) transmission (for data communications), respectively.
The core challenge is balancing sensing fidelity (measured via MSE between actual and estimated target positions, as well as the Cramér-Rao lower bound (CRLB) of trilateration) against communications throughput and fairness.
Design Principles: ISAC Decision and STA MLD Selection
ISAC Decision
ISAC decisions leverage a Kalman filter: the AP MLD predicts the target state using a constant-velocity model and available measurements, performing updates on new sensing actions, if scheduled. The choice between sensing and communications is governed by a developed time-based score criterion that accounts for elapsed time since the last sensing event, remaining time in the TXOP window, and a control variable α which explicitly trades off sensing versus communications (Figure 2).
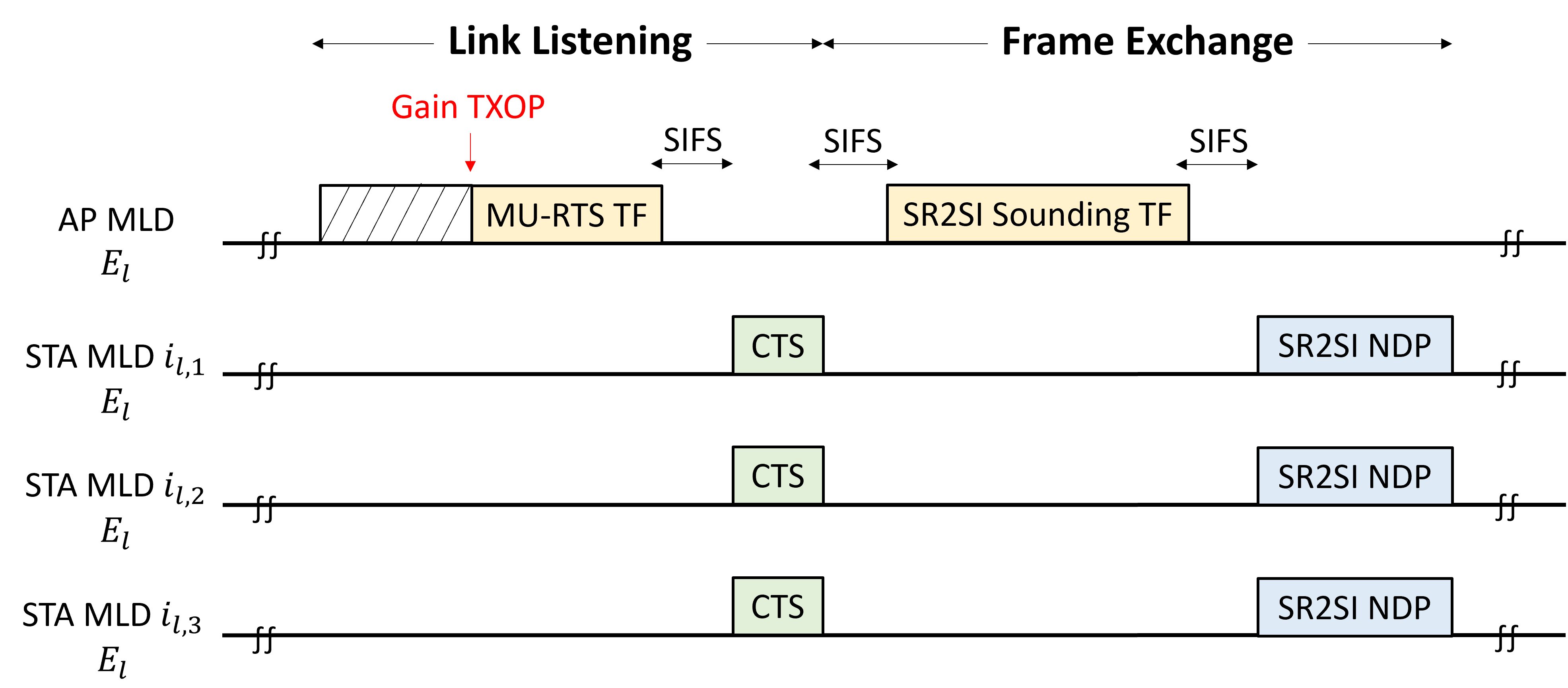
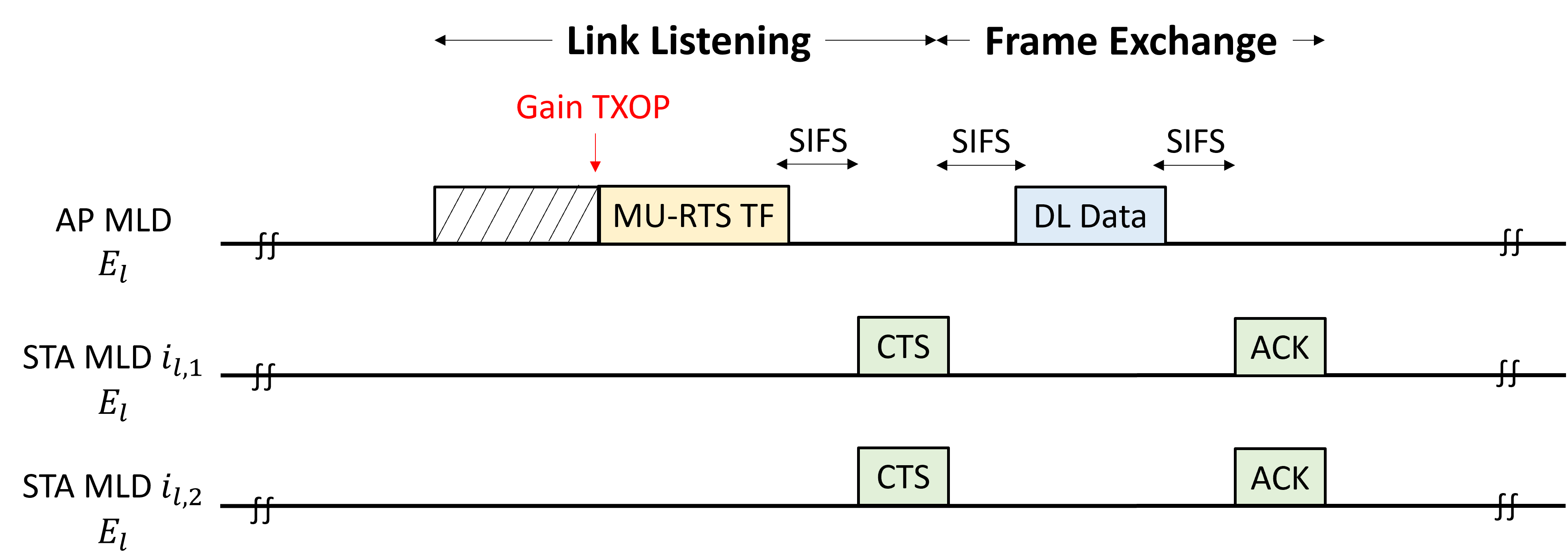
Figure 2: An illustration of ISAC under EMLSR operation.
STA MLD Selection
For UL sensing (scheduling trilateration), the AP selects three STA MLDs. Candidate sets are determined via a k-candidates heuristic, prioritizing those with the highest UL SNR, but final selection minimizes the predicted CRLB over trilateration based on the current state estimate. For DL communications, the scheduler solves an NP-hard weighted proportional fairness problem using a practical greedy heuristic—bytes transmitted are allocated to STA MLDs based on normalized DL backlog to ensure both throughput and fairness.
Non-Cooperative vs Cooperative Approaches
The non-cooperative approach resolves ISAC decision and STA MLD selection independently at each interface using only local information (Figure 3a). In contrast, the cooperative approach synchronizes decision logic and resource allocation across all interfaces, pooling state history and scheduling sensing such that any interface can access all MLDs when optimal (Figure 3b).
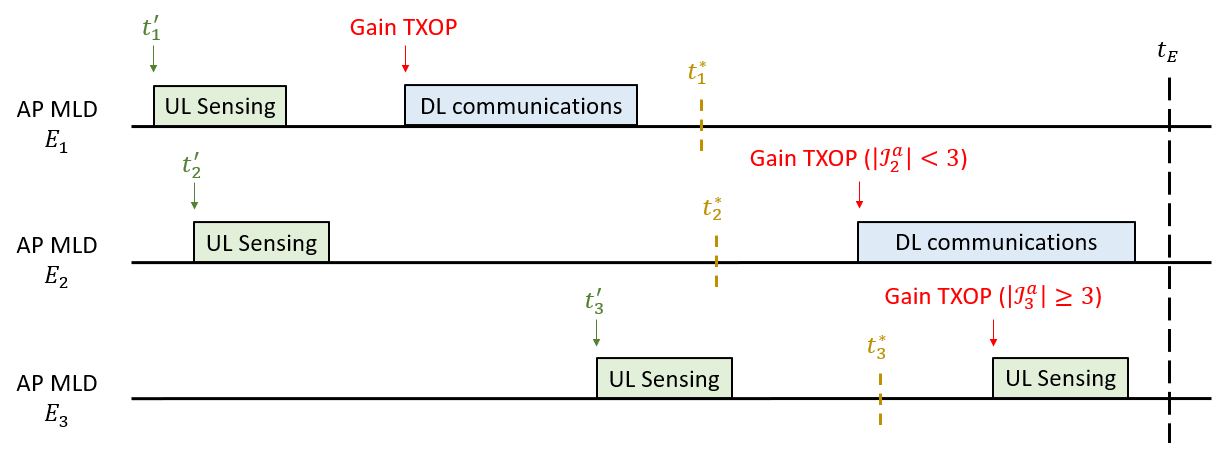
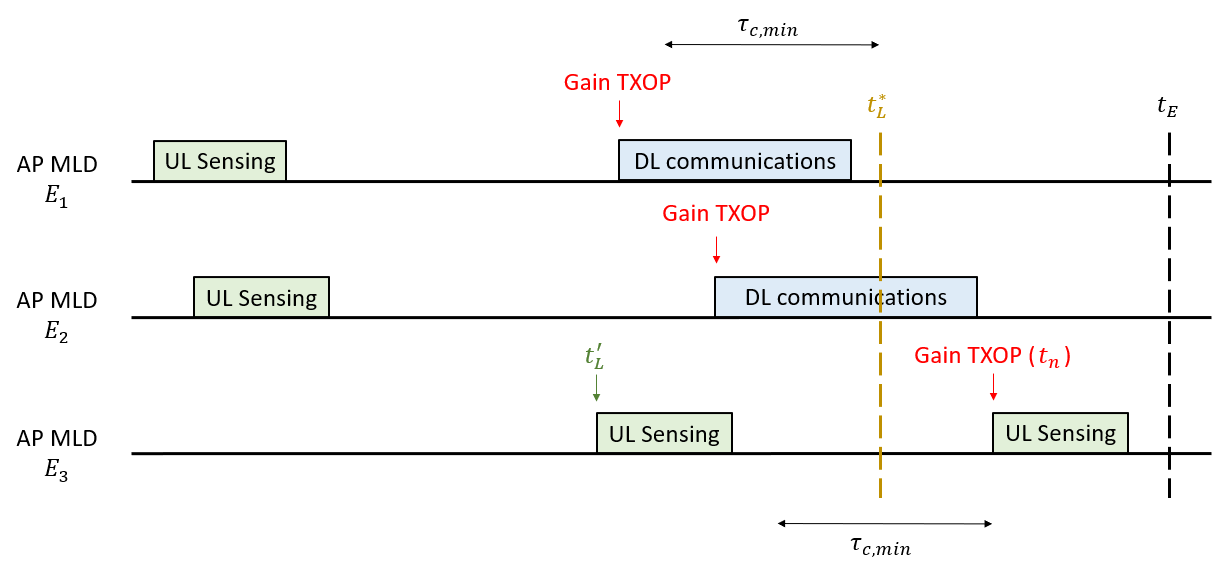
Figure 3: An illustration of proposed non-cooperative (top) and cooperative (bottom) approaches with Nl=0 and α=0.5.
The cooperative approach can avoid local minima in sensing performance caused by limited candidate sets or absence of critical STA MLDs at a given interface, at the cost of additional coordination overhead.
Algorithmic Complexity
Both approaches achieve tractable computational complexity: O(k3) for UL sensing (due to combinatorics in selecting STA MLDs from k candidates) and O(M) in DL communications (due to z-score normalization and greedy sorting). Maintenance of α-dependent thresholds and rapid Kalman filter updates ensure suitability for real-time implementation.
Simulation Results and Numerical Findings
Simulations systematically investigate the effects of k, α, and M (number of STA MLDs) on sensing accuracy (target position MSE), communications throughput, and Jain's fairness index. Key results include:
- Diminishing returns in increasing k: Little improvement is observed in MSE and throughput beyond k=4, streamlining the k-candidates heuristic.
- Tradeoff via α: Raising α improves sensing accuracy (lower MSE, lower predicted CRLB), at the expense of DL throughput, with cooperative approaches consistently yielding better sensing but reduced throughput compared to non-cooperative methods (Figure 4, Figure 5).
- Scalability with M: More STA MLDs yields better trilateration and lower MSE, indicating the clear advantage of dense device deployments for ISAC applications.
- Comparison with baseline random selection: The proposed algorithms outperform random UL/DL STA selection in both sensing and throughput, demonstrating the practical utility of the devised heuristics (Figure 6).
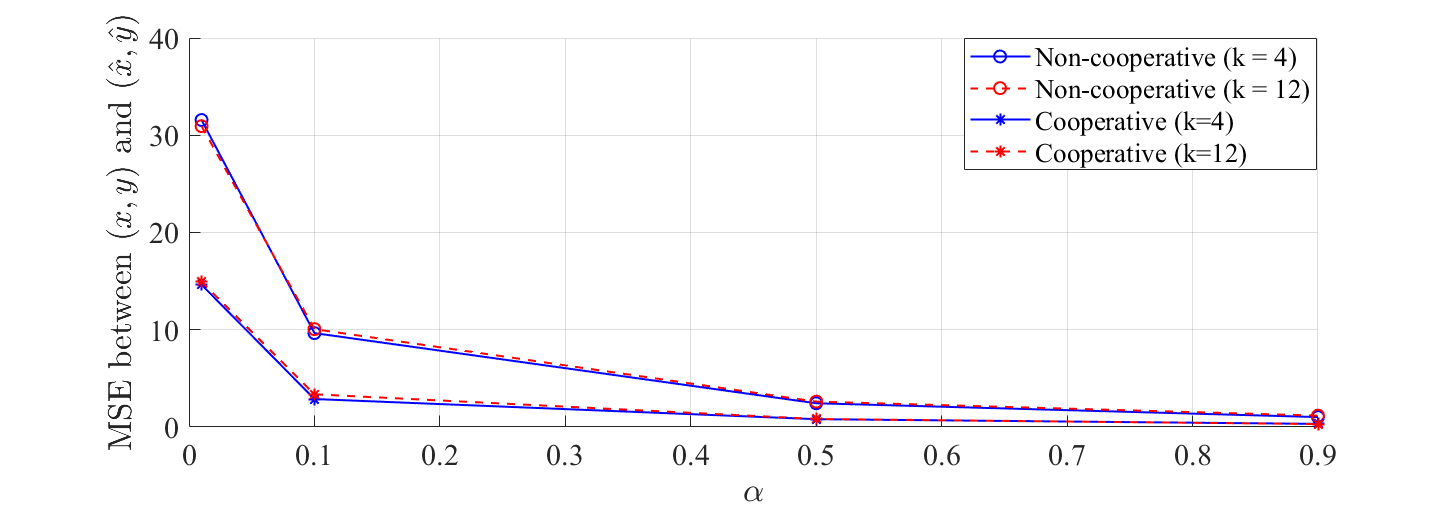
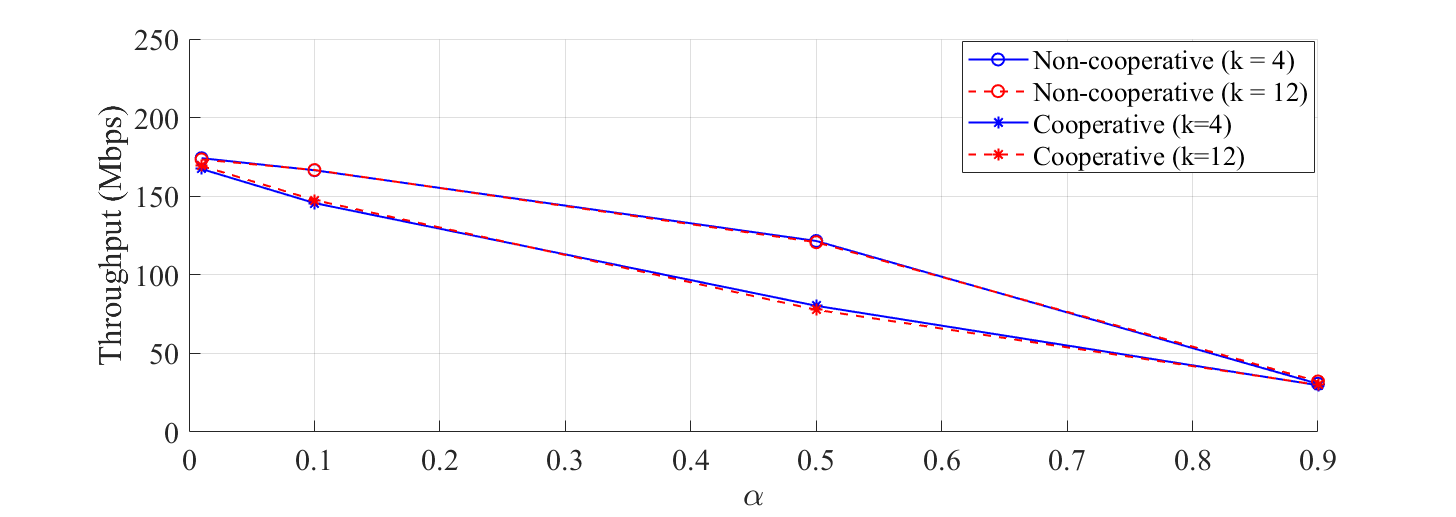
Figure 4: MSE and throughput under different values k={4,12} with number of STA MLDs M=12.
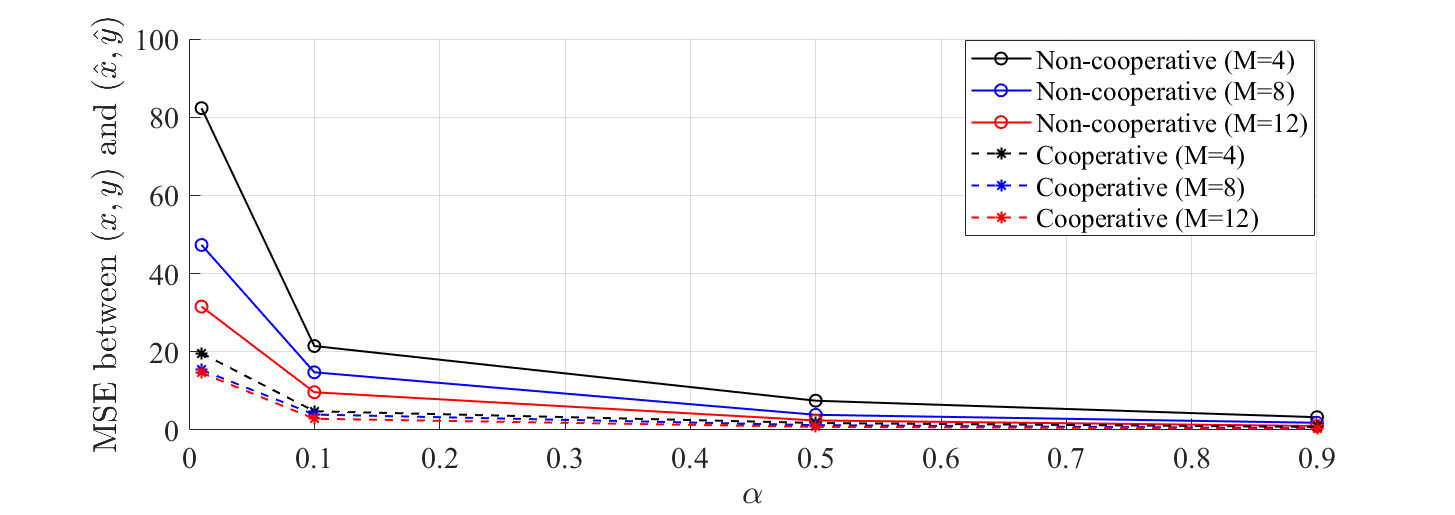
Figure 5: MSE between target position (x,y) and predicted target position (x^,y^) under different number of STA MLDs M={4,8,12} with k=4.
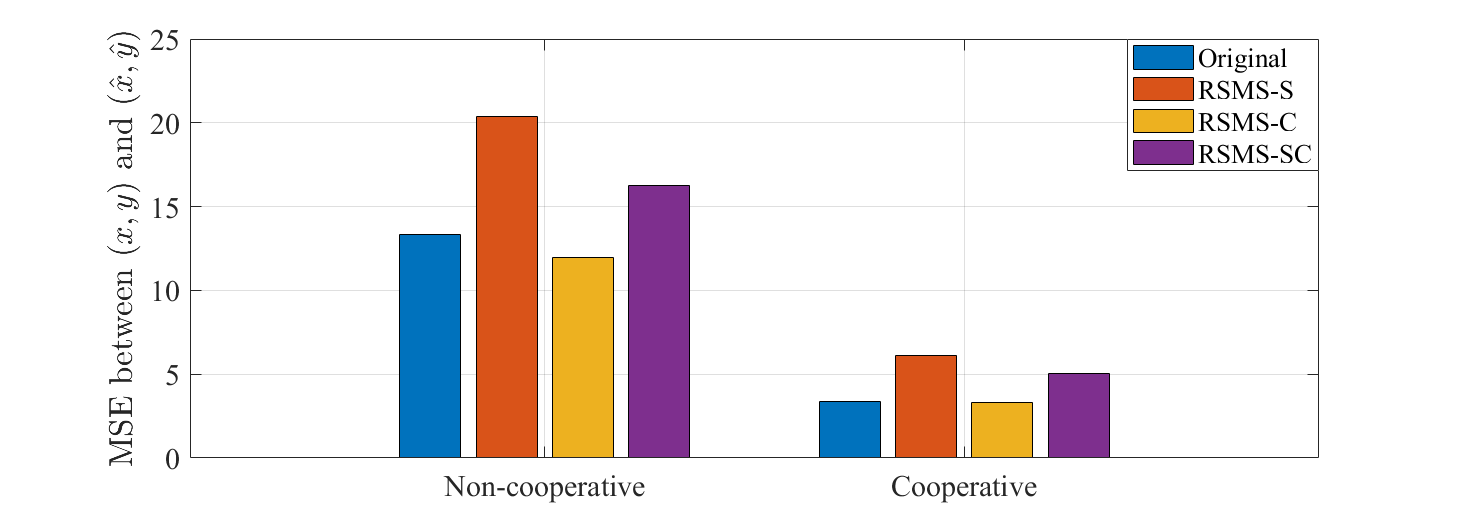
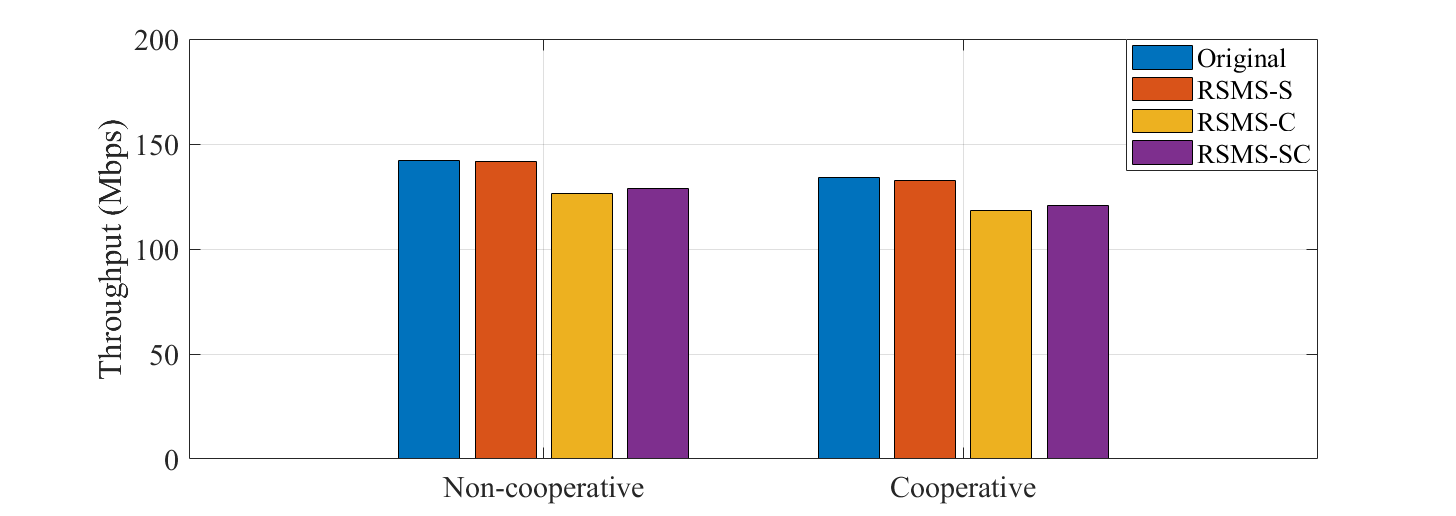
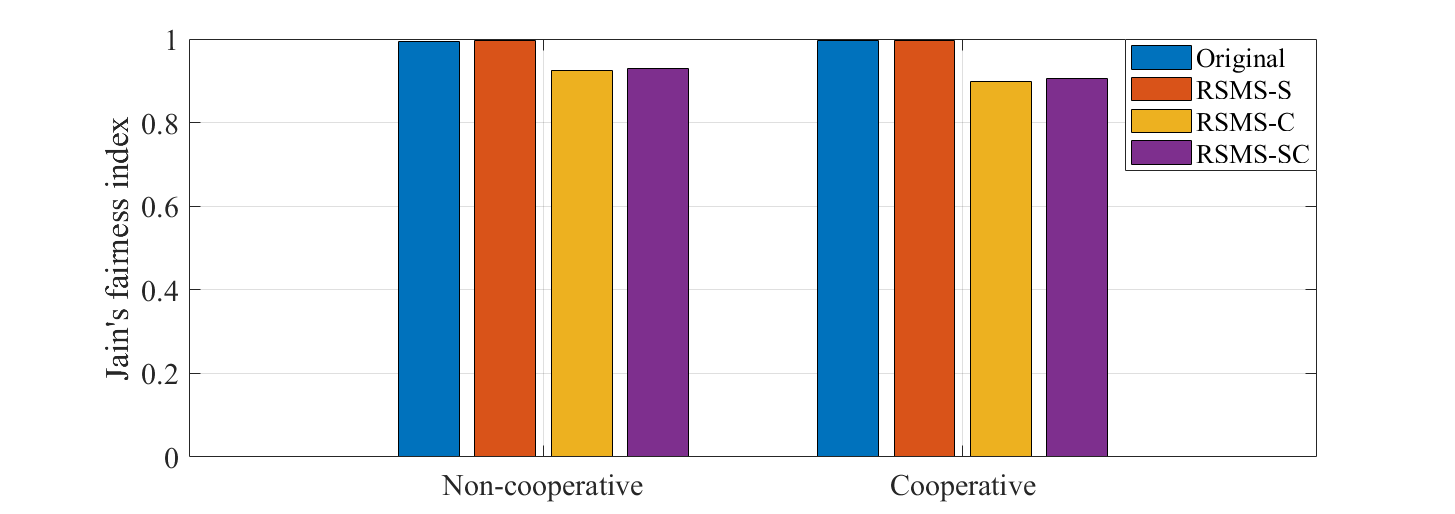
Figure 6: MSE, throughput, and Jain's fairness index under different schemes with number of STA MLDs M=8, k=4, and α=0.5.
Implications and Future Directions
The methods developed in this work reinforce the suitability of Wi-Fi 7+ as a backbone for ISAC applications in dense indoor environments, vehicular tracking, and emerging IoT deployments. The explicit formalization of the ISAC decision as a time-score problem and integration of the CRLB in resource scheduling establish new algorithmic baselines for joint communications-sensing systems. The cooperative approach, while slightly reducing throughput, achieves sensing accuracies approaching theoretical limits when enough STA MLDs are available.
Prospective research avenues include multi-target tracking, coordinated multi-AP systems (leveraging features envisioned for Wi-Fi 8/IEEE 802.11bn [10634004]), integration with reinforcement learning-based resource allocation, and adaptation to outdoor or large-scale scenarios with more heterogeneous delay and mobility constraints.
Conclusion
This paper provides a comprehensive algorithmic and performance evaluation framework for ISAC-enabled EMLSR Wi-Fi networks. The dual development of non-cooperative and cooperative approaches offers practical scheduling solutions with formal trade-offs between sensing and communication objectives, substantiated by both theoretical analysis and simulation. These results position ISAC over Wi-Fi 7+ as a technically viable enabler for future integrated networked sensing and communications applications, with immediate implications for real-world WLAN design and standardization.
Reference: "Target Tracking With ISAC Using EMLSR in Next-Generation IEEE 802.11 WLANs: Non-Cooperative and Cooperative Approaches" (2504.08360)