- The paper proposes a novel framework that models local neighborhoods with Gaussian functions to guide non-uniform point cloud upsampling via manifold distribution constraints.
- It employs local Gaussian fitting and geodesic constraints using Fisher-Rao distance to preserve geometric details and reduce errors in metrics like Chamfer and Hausdorff distances.
- Experimental evaluations on datasets such as PU1K and KITTI demonstrate enhanced uniformity and robustness, highlighting its potential for real-time 3D applications.
The paper "Non-uniform Point Cloud Upsampling via Local Manifold Distribution" (2504.11701) explores the challenges of point cloud upsampling, specifically addressing the non-uniform and sparse nature of data generated by 3D scanning technologies. The authors propose a novel method to enhance the quality of upsampled point clouds by introducing constraints derived from manifold distributions using Gaussian functions.
Introduction to Point Cloud Upsampling
Point clouds serve as crucial data structures in various 3D applications, ranging from autonomous driving to virtual reality. However, the inherent sparsity and noise in raw point cloud data necessitate efficient upsampling techniques to achieve dense, smooth, and geometrically accurate reconstructions. Traditional upsampling approaches, especially early optimization-based methods, often fall short in maintaining robustness and accuracy when faced with complex shapes.
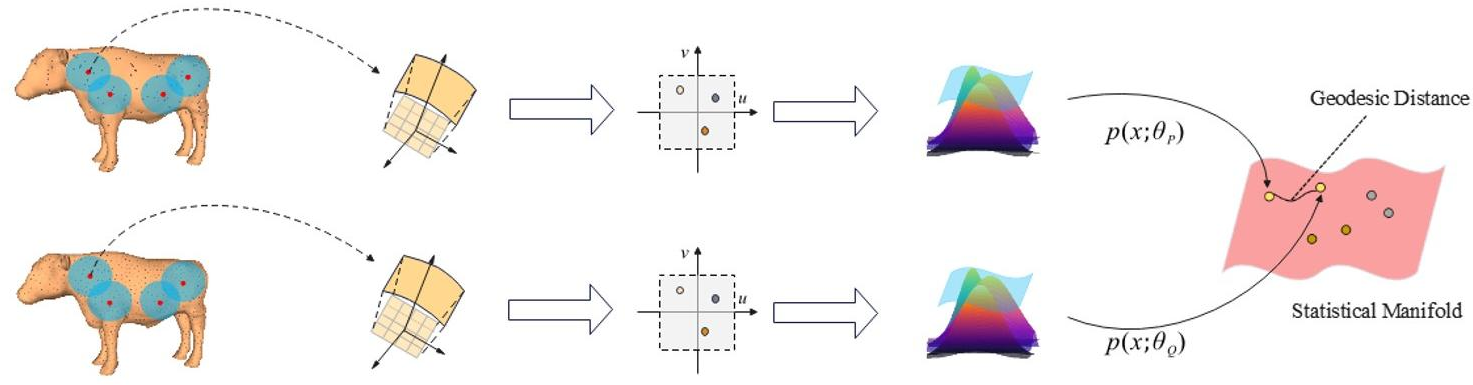
Figure 1: Our upsampling algorithm pipeline. For the input point cloud, we first construct a local coordinate system for each query point based on its surrounding neighborhood. We then perform local Gaussian fitting in the 2D parameter plane. Subsequently, geodesic constraints are applied on the statistical manifold formed by the local Gaussian functions. Finally, by resampling the constructed local Gaussian functions, we generate the upsampled point cloud.
Methodological Innovations
The paper introduces a technique where point clouds are interpreted as samples drawn from a probability distribution function, which is then used to construct a statistical manifold framework. Gaussian functions serve as the primary tool for representing each local neighborhood of the point cloud, enabling accurate depiction of the distribution characteristics.
Local Gaussian Fitting
The proposed method involves fitting local neighborhoods with Gaussian functions within their respective coordinate systems. By focusing on the covariance properties of Gaussian distributions, the technique allows for capturing intricate local geometric details, which is pivotal for accurate upsampling.
Manifold Distribution Constraints
A key innovation lies in imposing manifold distribution constraints through the minimization of geodesic distances on the statistical manifolds. This approach leverages the Fisher-Rao distance to ensure that the upsampled point clouds maintain their original geometric details and are uniformly distributed.
Experimental Evaluation
The method was evaluated on the PU1K dataset among others, demonstrating a significant improvement in generating uniformly distributed and dense point clouds. The results show that the proposed method consistently outperforms existing algorithms in terms of Chamfer Distance, Hausdorff Distance, and other metrics.
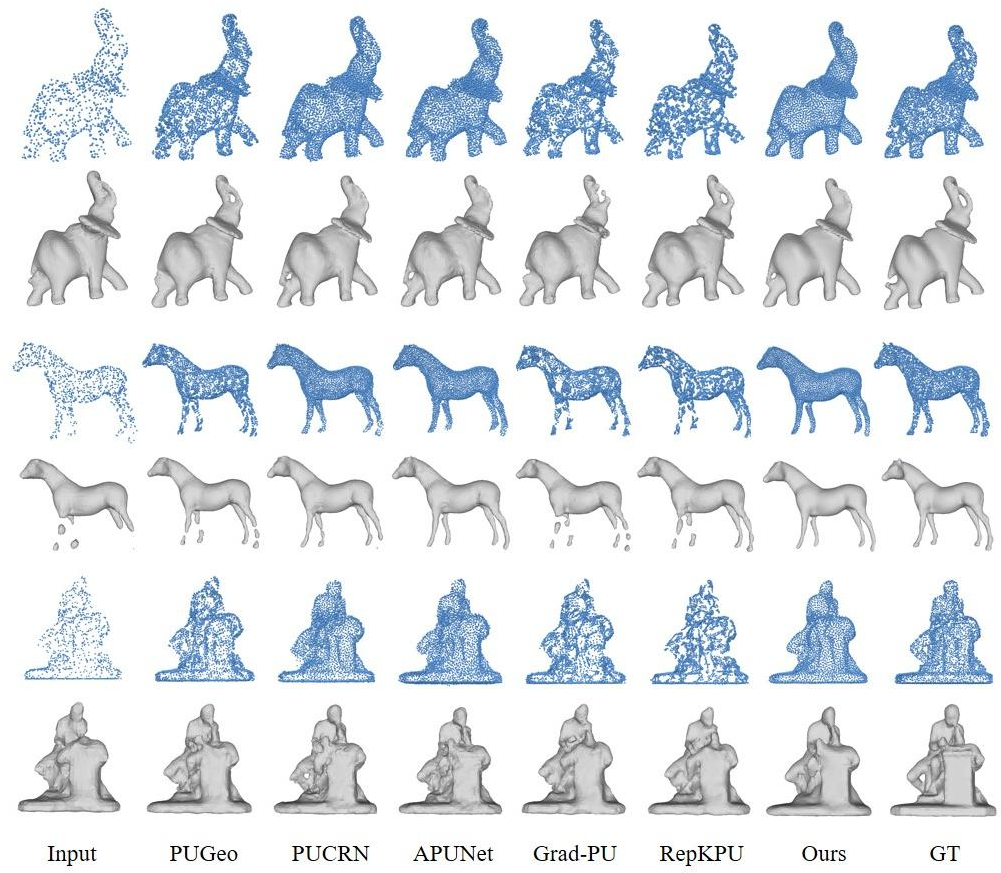
Figure 2: Visualization of the non-uniform PU1K dataset (1024) experiments based on different algorithms.
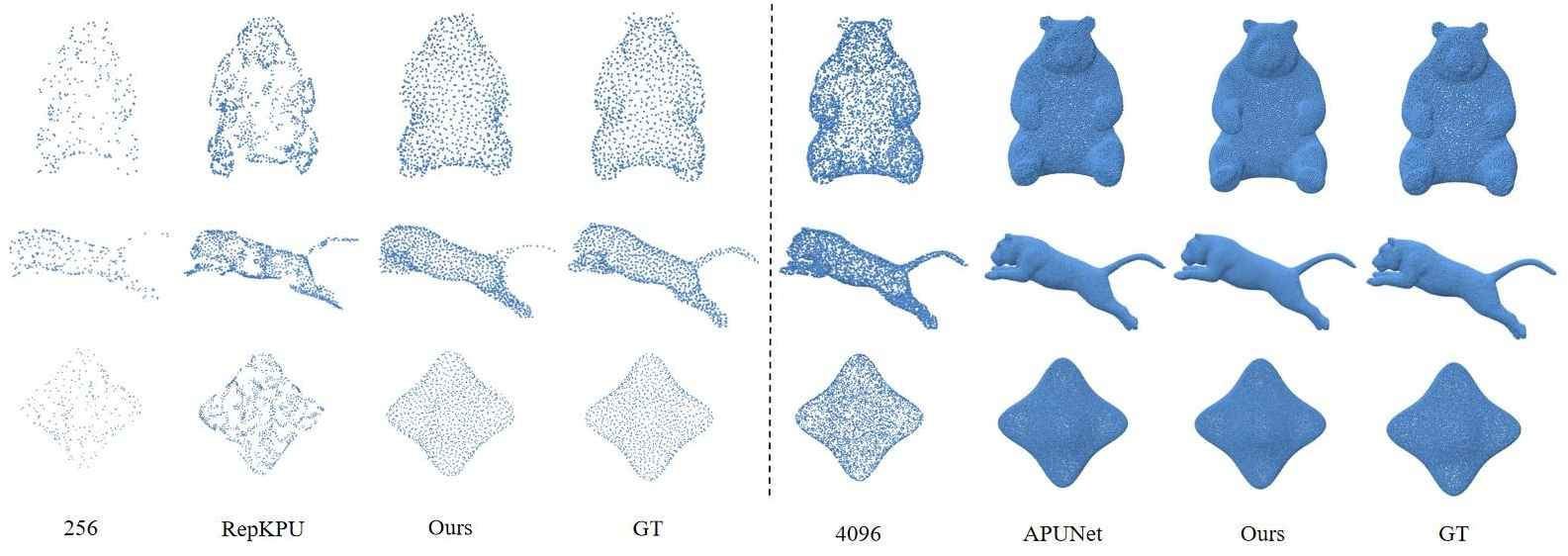
Figure 3: Visualization of upsampling results for partial data with 256 and 4096 input points.
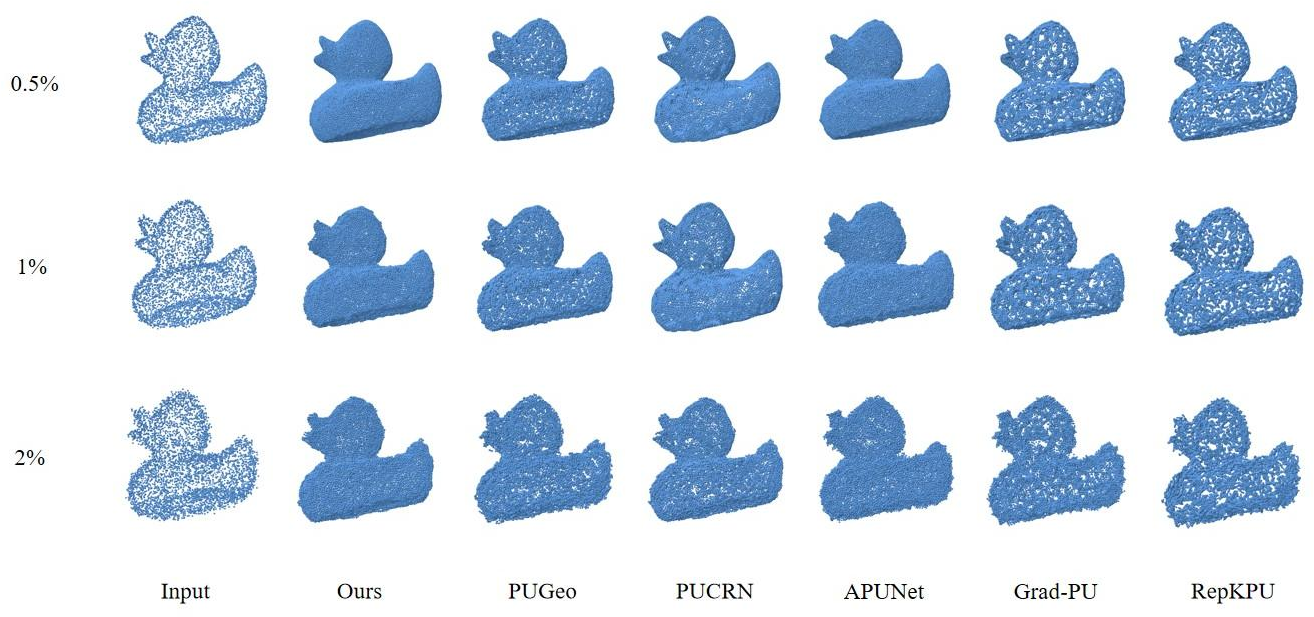
Figure 4: Upsampling results for input point clouds with noise levels of 0.5\%, 1\%, and 2\%.
Robustness and Generalization
Tests conducted on datasets with varying noise levels demonstrate the robustness of the method. Real-world scans from the KITTI dataset were used to highlight the method's practical applicability. The approach exhibited superior performance in controlling noise and generating uniform point distributions.
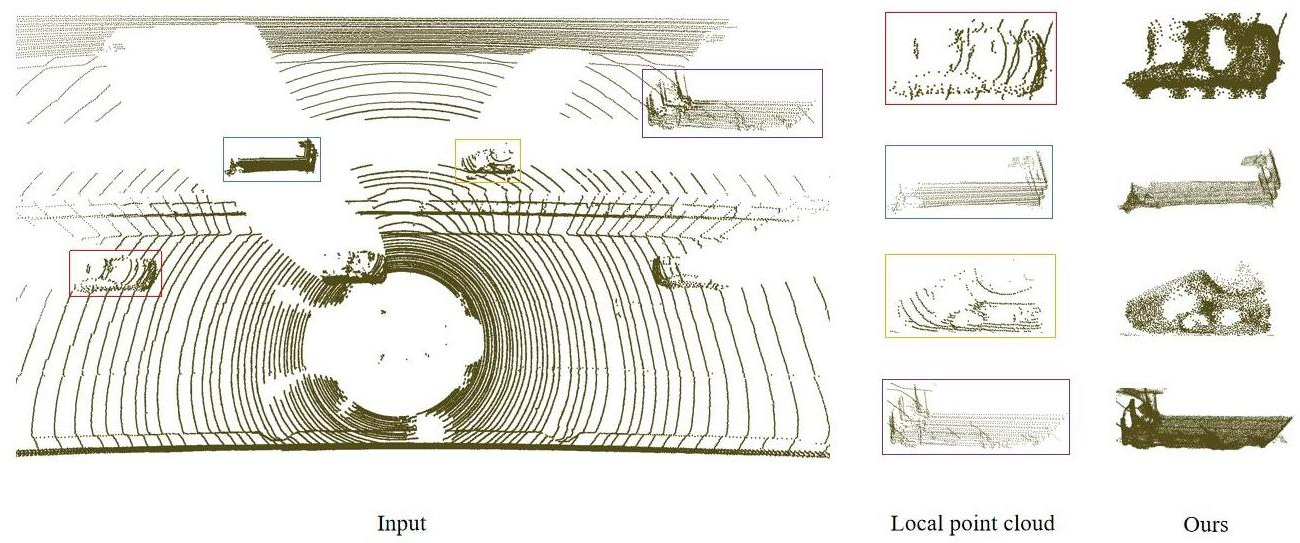
Figure 5: Upsampling results for LiDAR real-time scanned point cloud data.
Conclusion and Future Directions
The research presents a robust framework for point cloud upsampling by integrating the intrinsic distribution characteristics of point clouds through manifold constraints. Future work may explore extending this method to real-time applications and introducing additional geometric priors for even more effective upsampling in dynamic environments. The potential to expand this method for diverse applications in 3D modeling and interactive media presents an exciting frontier for further investigation.