- The paper introduces DRA-MPPI, which integrates Monte Carlo approximations to evaluate collision risk in real-time.
- The methodology enhances navigation safety by balancing dynamic risk with task performance in densely populated settings.
- Results indicate improved task completion times and lower collision probabilities compared to traditional motion planning methods.
Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations
Introduction
The paper "Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations" presents a novel approach to motion planning for mobile robots operating in dynamic, human-populated environments. The introduced method, Dynamic Risk-Aware Model Predictive Path Integral control (DRA-MPPI), enhances navigation safety by incorporating stochastic predictions of obstacles into the planning process.
Problem Context and Challenges
Traditional motion planning systems struggle with real-time decision-making in environments where human behavior introduces significant uncertainty. Predictive models provide probabilistic trajectories that need to be integrated for effective navigation. Existing methods often resort to excessive conservatism, leading to the "frozen robot" problem. DRA-MPPI aims to mitigate these limitations by efficiently approximating joint collision probabilities using Monte Carlo sampling.
Proposed Methodology: DRA-MPPI
DRA-MPPI builds upon Model Predictive Path Integral Control (MPPI) by incorporating dynamic, non-Gaussian predictions of obstacle movements using Monte Carlo methods. The approach operates in real-time by sampling potential robot trajectories and evaluating them against a probabilistic measure of collision risk. This technique allows for the rejection of high-risk trajectories while maintaining the flexibility of navigating through densely populated environments.
The core innovation is the computation of collision risk via a Monte Carlo approximation that evaluates all trajectories in parallel for efficiency. This avoids the computational overhead associated with analytical solutions, supporting scalability in environments with numerous dynamic agents.
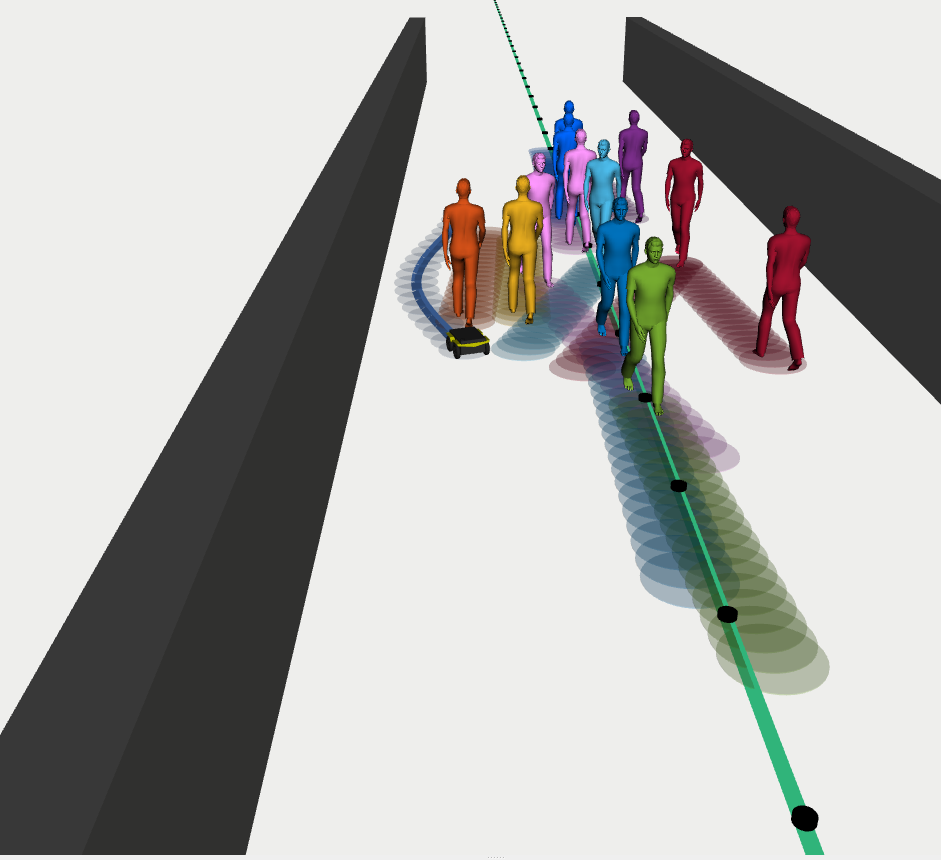
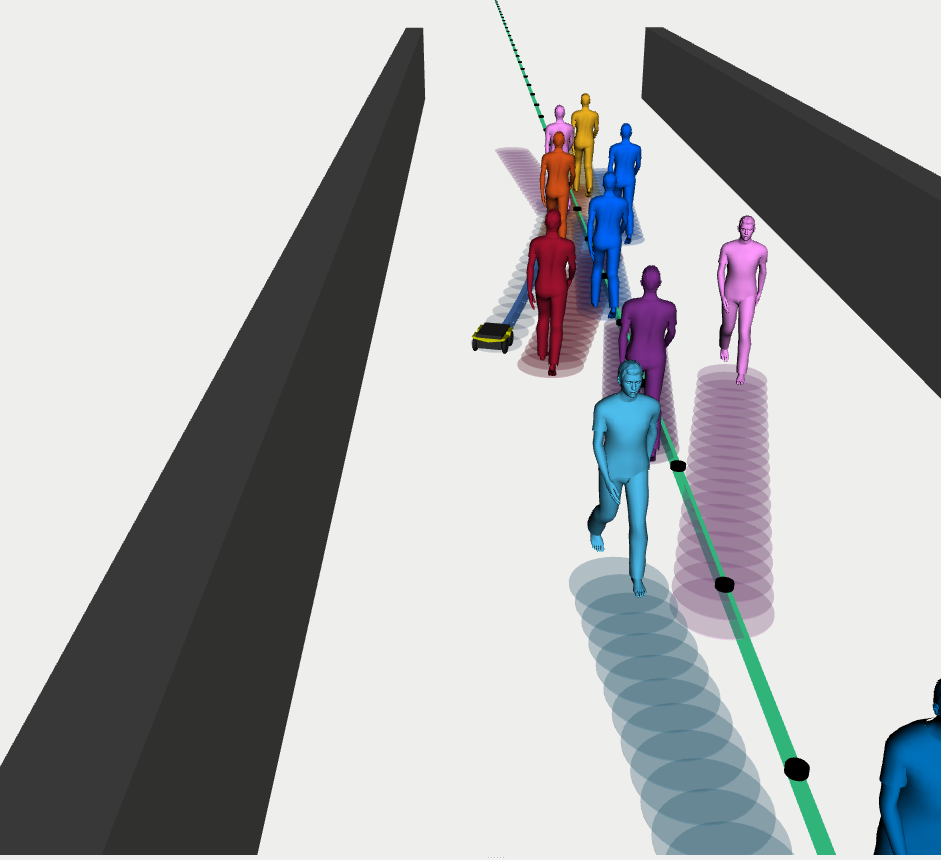
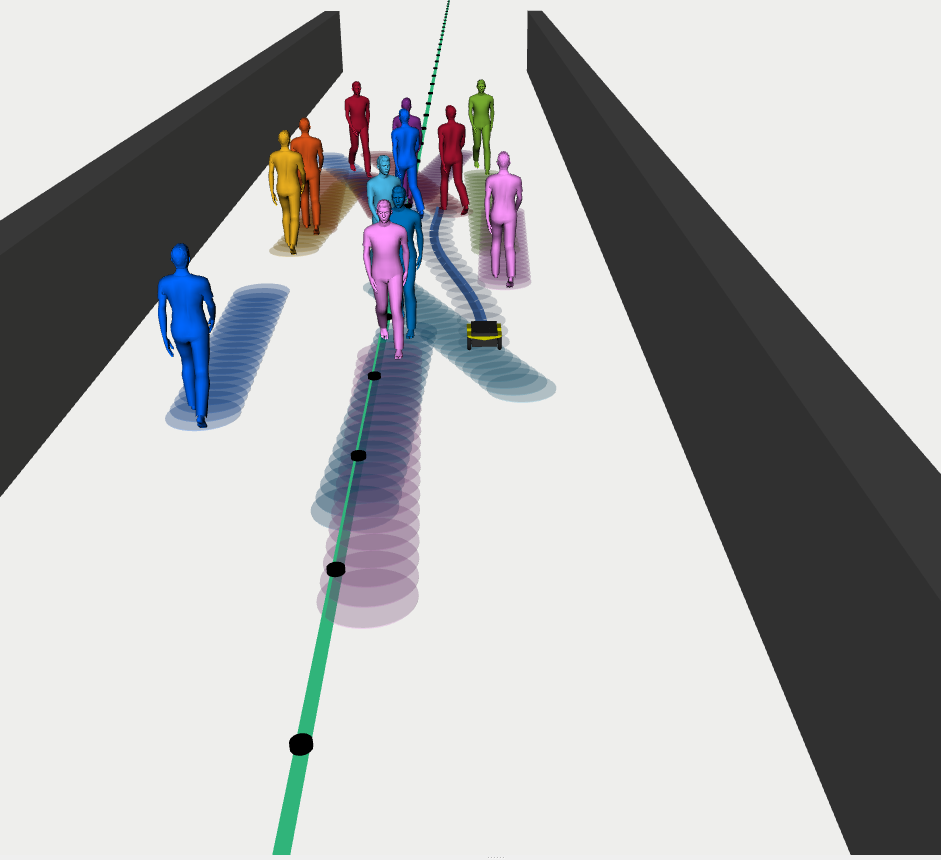
Figure 1: Visualization of maximum collision probability across 100 experiments under multi-modal pedestrian prediction setup.
Preliminaries and Model Details
The robot's motion is controlled through discrete-time dynamic equations, accounting for both the state of the robot and the probabilistic behavior of surrounding obstacles modeled as Mixtures of Gaussians. The planner uses this information to minimize a cost function defined by path-following performance, energy efficiency, and risk.
The approach further incorporates chance constraints to bound the risk that the robot collides with obstacles. The collision probability is approximated using Monte Carlo sampling, which balances between task completion and maintaining safety margins against human agents.
Simulation and Results
Comprehensive evaluations demonstrate that DRA-MPPI outperforms existing methods, including Scenario-based MPC and traditional planners, particularly in handling higher pedestrian densities with improved task duration and lower collision probabilities. Evaluation metrics include task duration, velocity, collision probability, and success rate, highlighting DRA-MPPI's capabilities in dynamic settings.

Figure 2: Task duration under uni-modal pedestrian prediction, showcasing reduced variance and lower completion times with DRA-MPPI.
Real-World Application and Computational Efficiency
The algorithm excels not only in simulation but also in real-world trials, demonstrating robustness in mixed pedestrian and robot environments. Computational efficiency is emphasized through parallel processing capabilities that allow real-time implementation using existing computational resources.
The Monte Carlo approach mitigates excessive conservatism by providing probabilistic safety guarantees, crucial for deployment alongside humans.
Conclusion
DRA-MPPI represents a significant advancement in autonomous navigation systems for dynamic environments. By effectively incorporating stochastic predictions and performing real-time risk evaluations, the method ensures enhanced safety and efficiency. Future directions involve optimizing computational aspects and extending the approach to more complex dynamic scenarios, potentially leveraging GPU acceleration for improved latency.
This work highlights the integration of probabilistic models in robotics, emphasizing the balancing act between risk management and task performance in human-populated environments.