- The paper introduces FastTrack, a novel method that offloads computationally intensive tracking tasks in ORB-SLAM3 to a GPU, achieving up to 2.8x speed improvements.
- It leverages CUDA for efficient stereo feature matching and local map tracking, reducing data transfer overhead and bypassing pose optimization with minimal accuracy loss.
- The evaluation on EuRoC and TUM-VI datasets shows reduced frame drops and competitive trajectory accuracy, enhancing real-time SLAM performance in resource-constrained environments.
FastTrack: GPU-Accelerated Tracking for Visual SLAM
The paper "FastTrack: GPU-Accelerated Tracking for Visual SLAM" presents a method to enhance the performance of ORB-SLAM3 by offloading computational components to the GPU, thus improving tracking efficiency within visual-inertial SLAM systems. The research aims to maintain real-time operations in resource-constrained environments by accelerating key components of the tracking process.
Introduction
In visual-inertial SLAM, accurate and timely tracking is crucial to avoid localization errors or tracking loss. This paper introduces FastTrack, which leverages GPU acceleration to improve handling of stereo feature matching and local map tracking, targeting the bottlenecks traditionally encountered in SLAM systems. The authors implement their design on ORB-SLAM3 using CUDA, achieving up to 2.8x performance improvement in specific configurations.
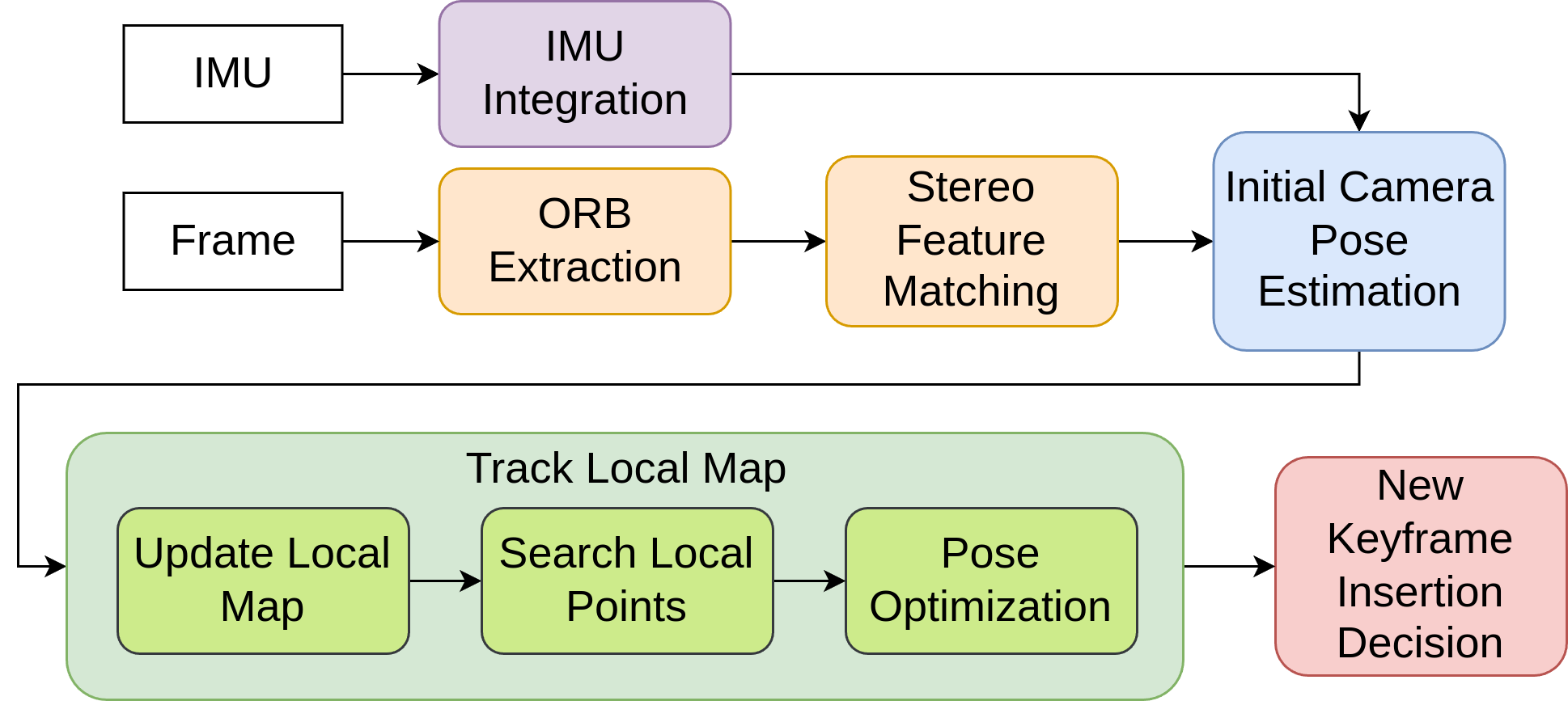
Figure 1: The workflow of the tracking process in ORB-SLAM3.
Methodology
FastTrack seeks to offload computationally intensive segments of the tracking process to the GPU, thus enhancing speed and efficiency. The process involves:
- ORB Feature Extraction: The existing GPU-accelerated ORB feature extraction module is incorporated, reducing data transfer between GPU and CPU and accelerating the image pyramid creation.
- Stereo Matching: The stereo feature matching is optimized with separate strategies for pinhole and fisheye cameras, leveraging CUDA to allow matching operations to be executed in parallel.
- Local Map Tracking: GPU is used for the Search by Projection task, enhancing parallelizability while mitigating data transfer costs by structuring memory usage efficiently.
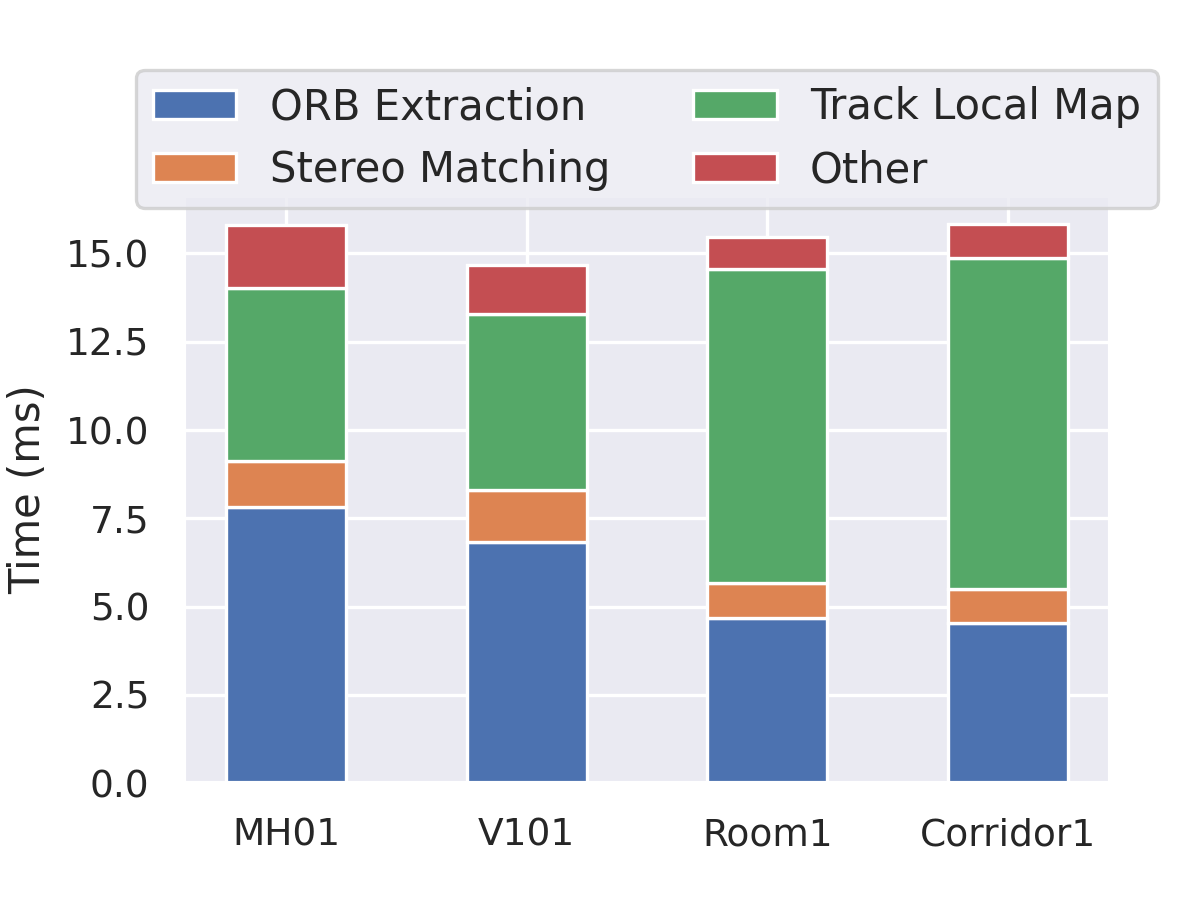
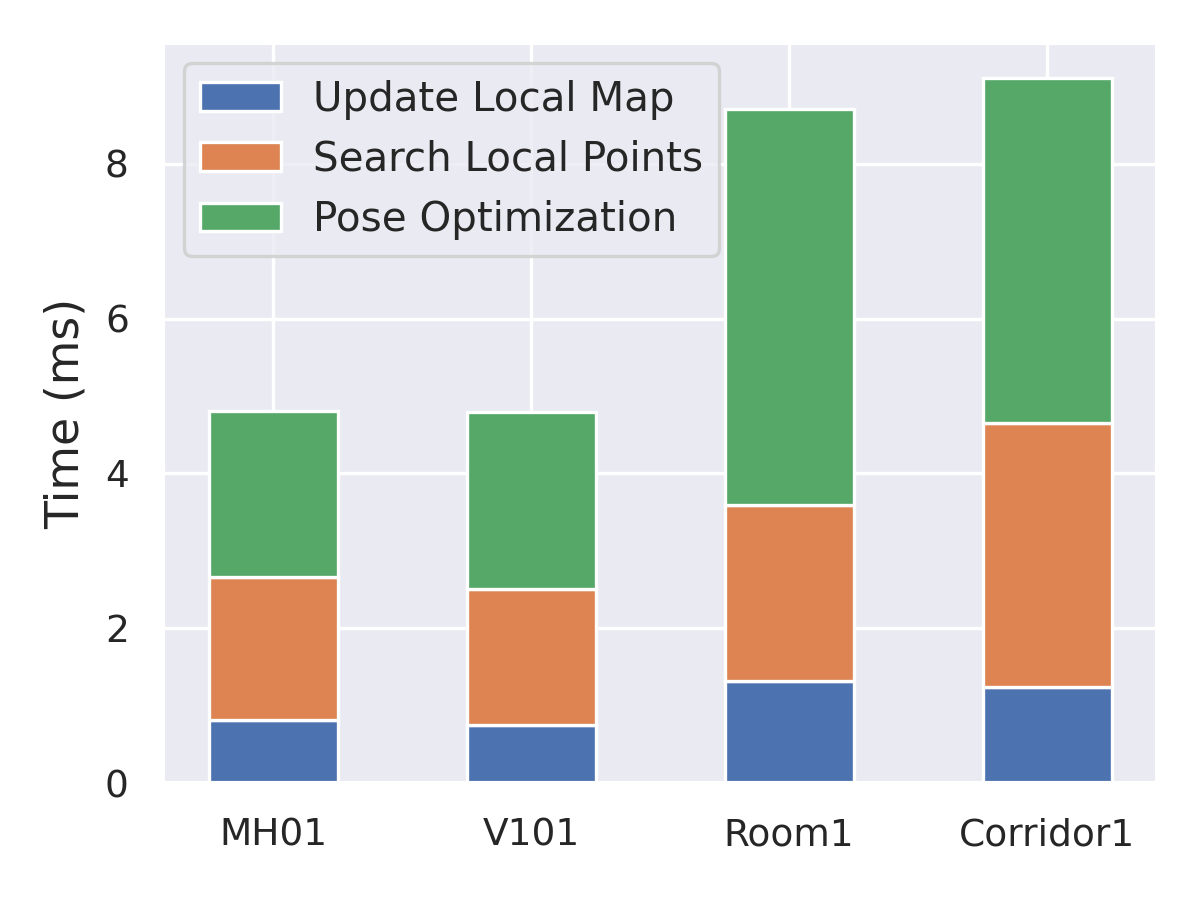
Figure 2: Tracking components in ORB-SLAM3 where optimization occurs.
- Data Transfer Optimization: Efficient handling of data transfer between the GPU and CPU is paramount, lowering the risk of offsetting the gains achieved through GPU parallelization.
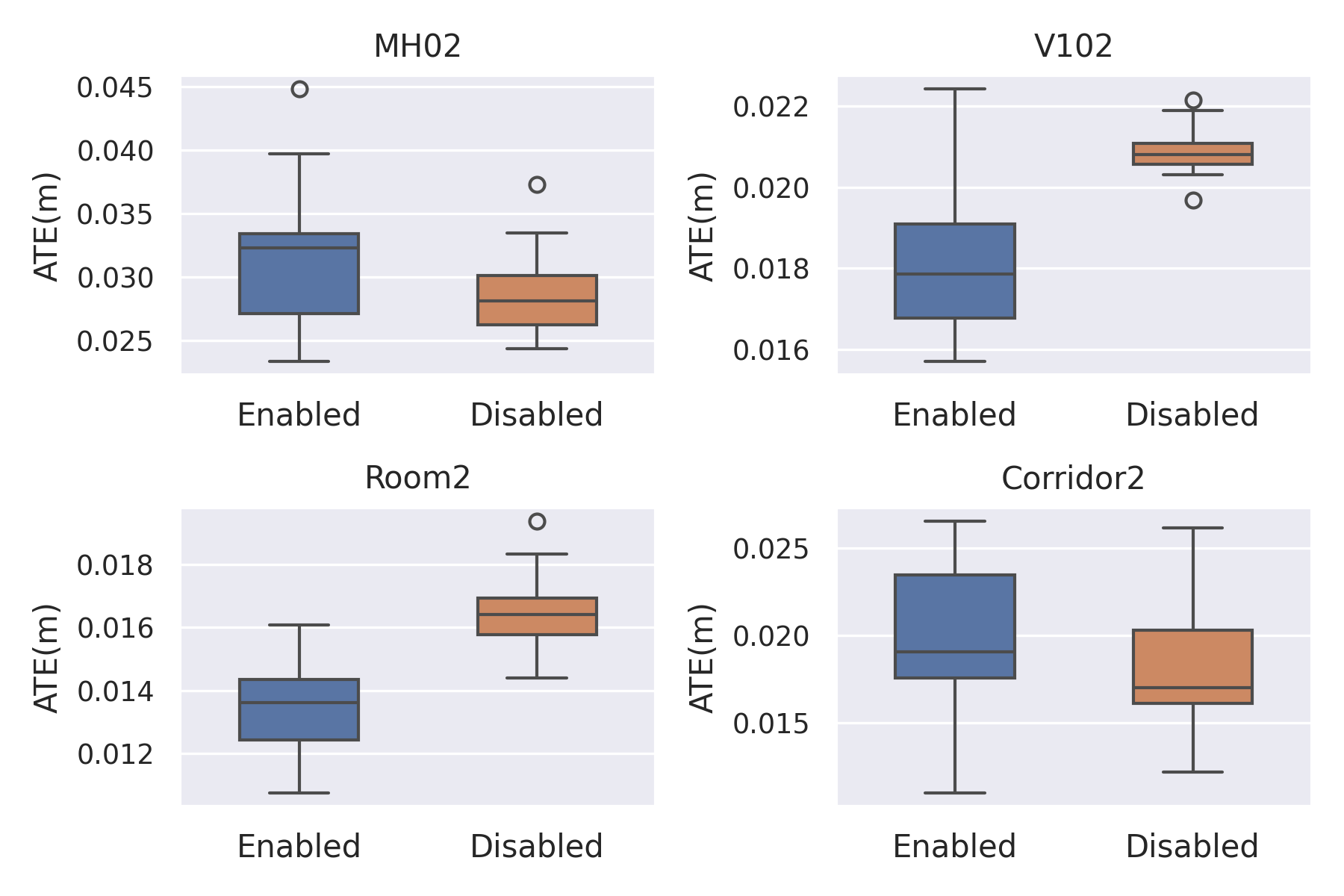
- Pose Optimization Reduction: FastTrack bypasses the pose optimization step within local map tracking. Experiments show minimal impact on trajectory accuracy due to inherent redundancy with later optimization stages.
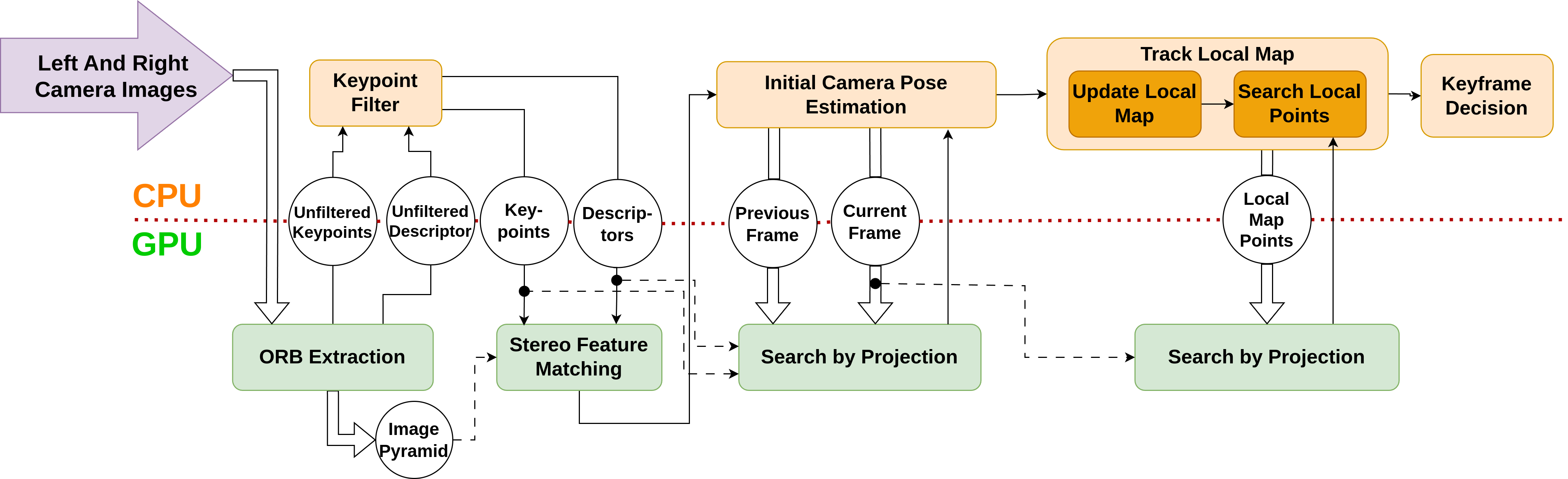
Figure 3: Data flow of the tracking process, detailing CPU and GPU processing components.
The paper presents extensive evaluation using the EuRoC and TUM-VI datasets. Key findings include:
Conclusions and Future Work
FastTrack successfully demonstrates how GPU resources can be strategically used to optimize tracking performance in visual-inertial SLAM, representing an advancement for systems like ORB-SLAM3. Future work could involve extending these techniques to other SLAM variants and exploring further performance optimizations in diverse environmental conditions.
This paper contributes significantly to the ongoing efforts to enhance SLAM systems' efficiency, ensuring their applicability across a broader range of hardware platforms and use-cases. By addressing the computational bottlenecks and resource allocation dynamically, FastTrack sets the stage for more resilient and versatile tracking systems in robotic and augmented reality applications.