A Framework for Optimal Ankle Design of Humanoid Robots
Abstract: The design of the humanoid ankle is critical for safe and efficient ground interaction. Key factors such as mechanical compliance and motor mass distribution have driven the adoption of parallel mechanism architectures. However, selecting the optimal configuration depends on both actuator availability and task requirements. We propose a unified methodology for the design and evaluation of parallel ankle mechanisms. A multi-objective optimization synthesizes the mechanism geometry, the resulting solutions are evaluated using a scalar cost function that aggregates key performance metrics for cross-architecture comparison. We focus on two representative architectures: the Spherical-Prismatic-Universal (SPU) and the Revolute-Spherical-Universal (RSU). For both, we resolve the kinematics, and for the RSU, introduce a parameterization that ensures workspace feasibility and accelerates optimization. We validate our approach by redesigning the ankle of an existing humanoid robot. The optimized RSU consistently outperforms both the original serial design and a conventionally engineered RSU, reducing the cost function by up to 41% and 14%, respectively.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What this paper is about
This paper is about making the “ankle” of a humanoid robot work better. A robot’s ankle is the first part that feels the ground when walking, so its design affects balance, safety, and how fast and smoothly the robot can move. The authors present a clear, step-by-step way to design and compare different ankle mechanisms, helping engineers pick the best shape, size, and motors for the job.
The big questions the researchers asked
- How can we design a robot ankle that is strong, fast, safe, and efficient for real walking tasks?
- Which ankle structure is better for these goals: SPU (uses straight-line “linear” actuators) or RSU (uses spinning “rotary” actuators)?
- How do we fairly compare different designs that use different parts and shapes?
- Can we guarantee the ankle can always move through all the angles we need (its “workspace”) without getting stuck?
How they studied it (methods in simple terms)
1) Two ankle types: SPU vs. RSU
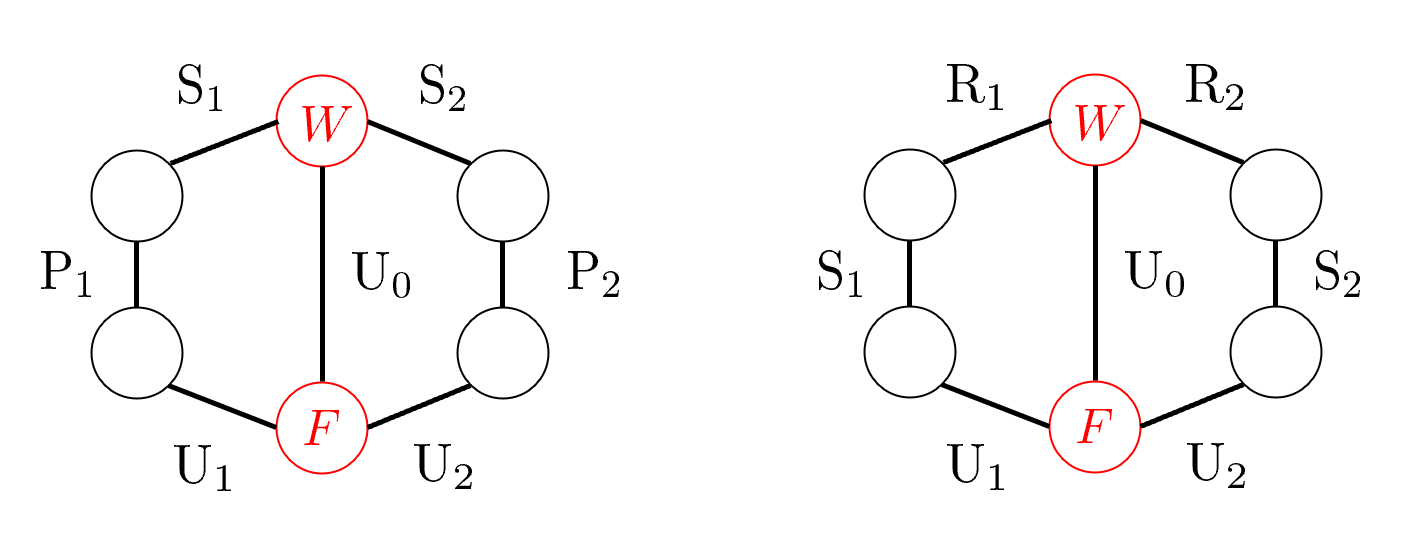
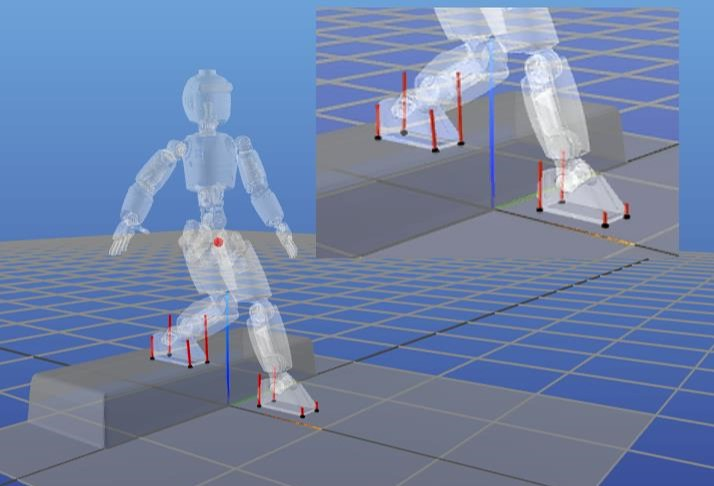
- Both designs attach the robot’s lower leg (shin) to the foot using three “legs” that form closed loops (like a sturdy triangle frame).
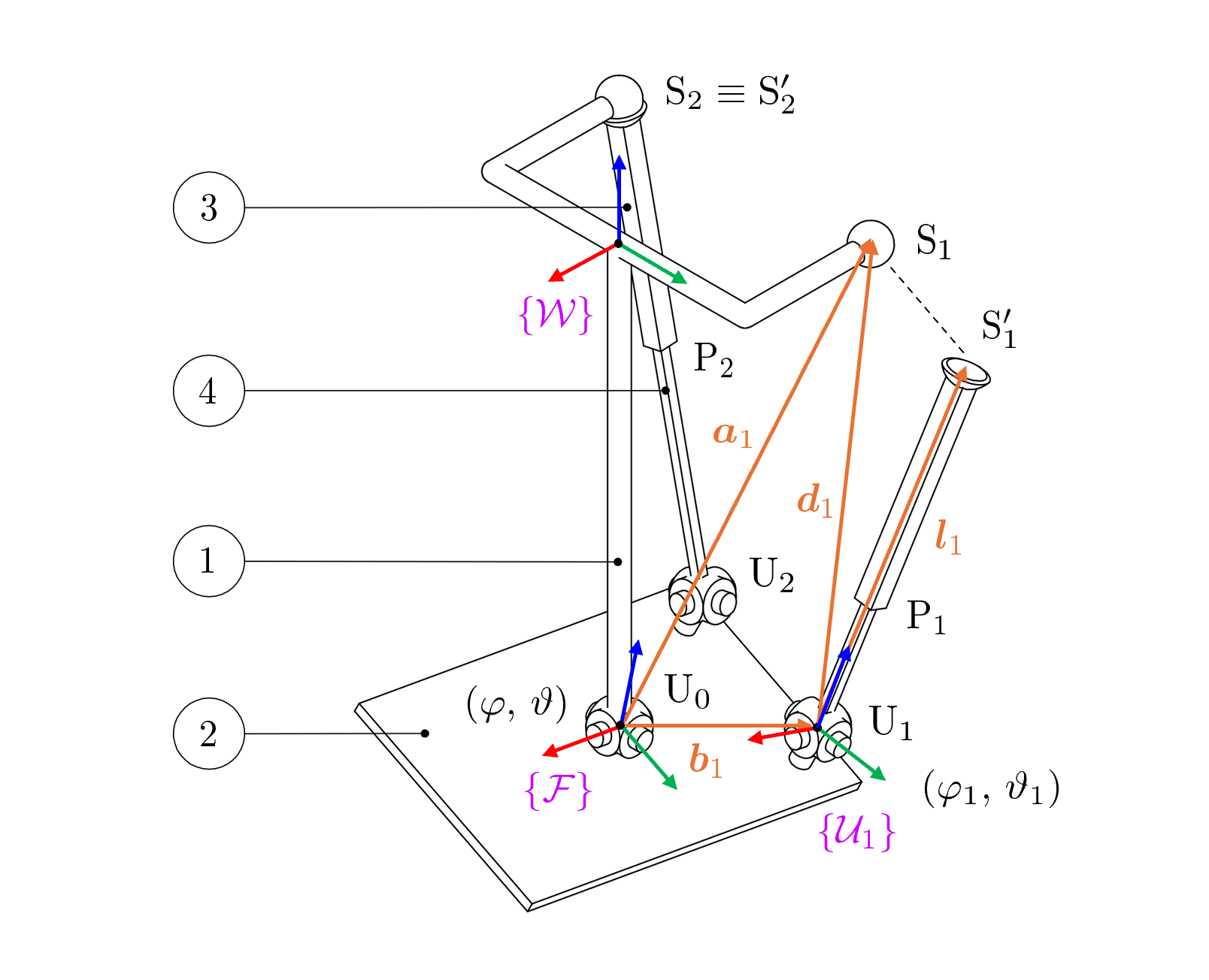
- SPU: Spherical–Prismatic–Universal
- Think of a sliding rod (prismatic = sliding joint) that can extend and retract, guided by ball-and-hinge joints.
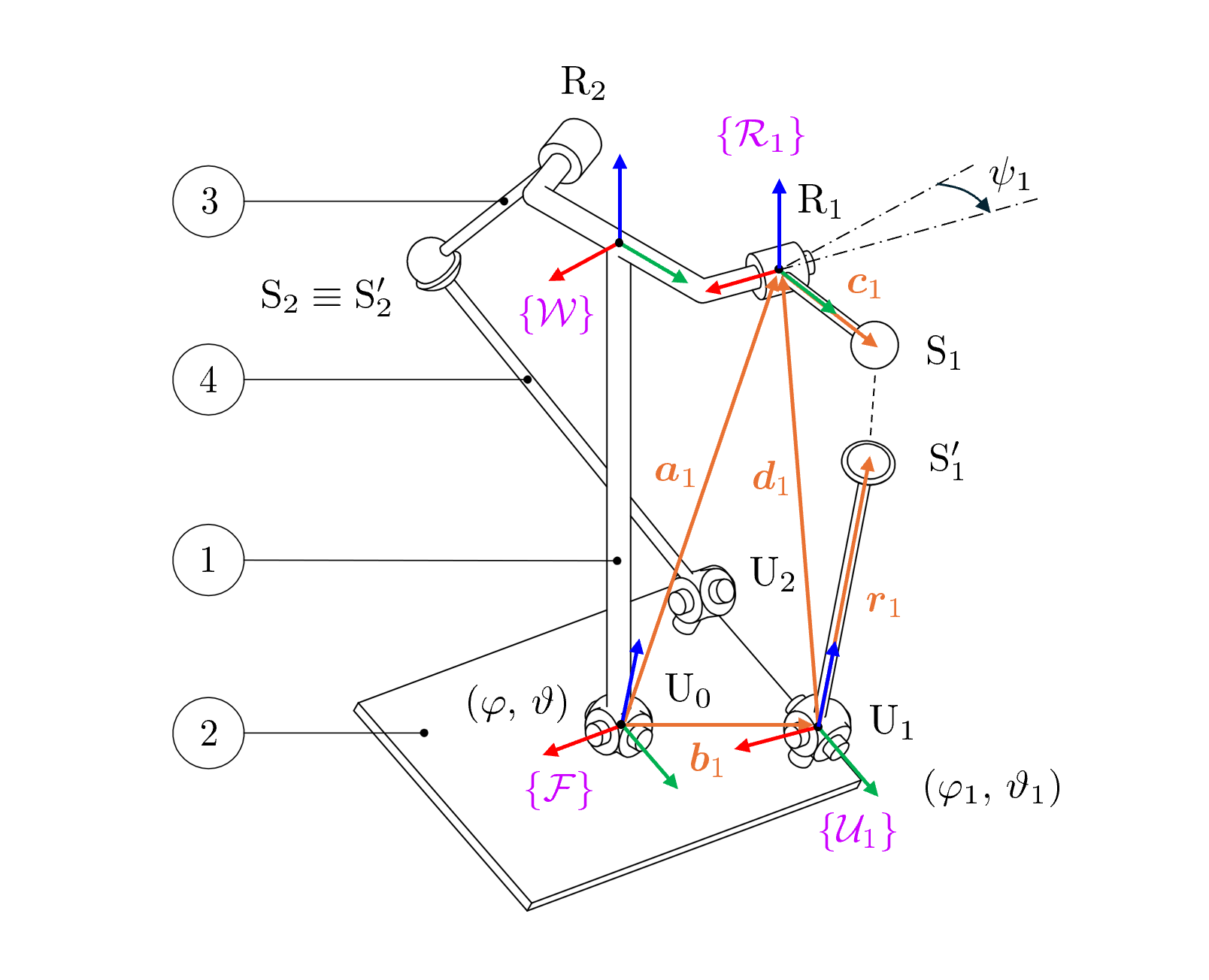
- RSU: Revolute–Spherical–Universal
- Think of a short crank connected to a rod (like parts of a bicycle or a piston crank) that rotate and push/pull, also with ball-and-hinge joints.
Parallel mechanisms (like SPU and RSU) spread loads across multiple paths. They let you place heavy motors higher up the leg, making the foot lighter. That helps balance, speed, and energy use.
2) Understanding motion with simple math “translators”
- Inverse kinematics (IK): Given a foot angle (roll and pitch), what should the motors do? The authors derived clean, exact formulas to solve this for both SPU and RSU.
- Jacobian: Think of this as a translator that tells you how motor speeds turn into ankle speeds, and how ankle forces turn into motor forces. It also warns you about “singularities,” which are awkward positions where motion is hard or requires huge forces (like trying to push a door by pressing near the hinge).
“Manipulability” measures how easily the ankle can move in any direction. A more “round” ability is better; a very stretched shape means it moves easily in some directions but struggles in others.
3) Making sure RSU always works where it should
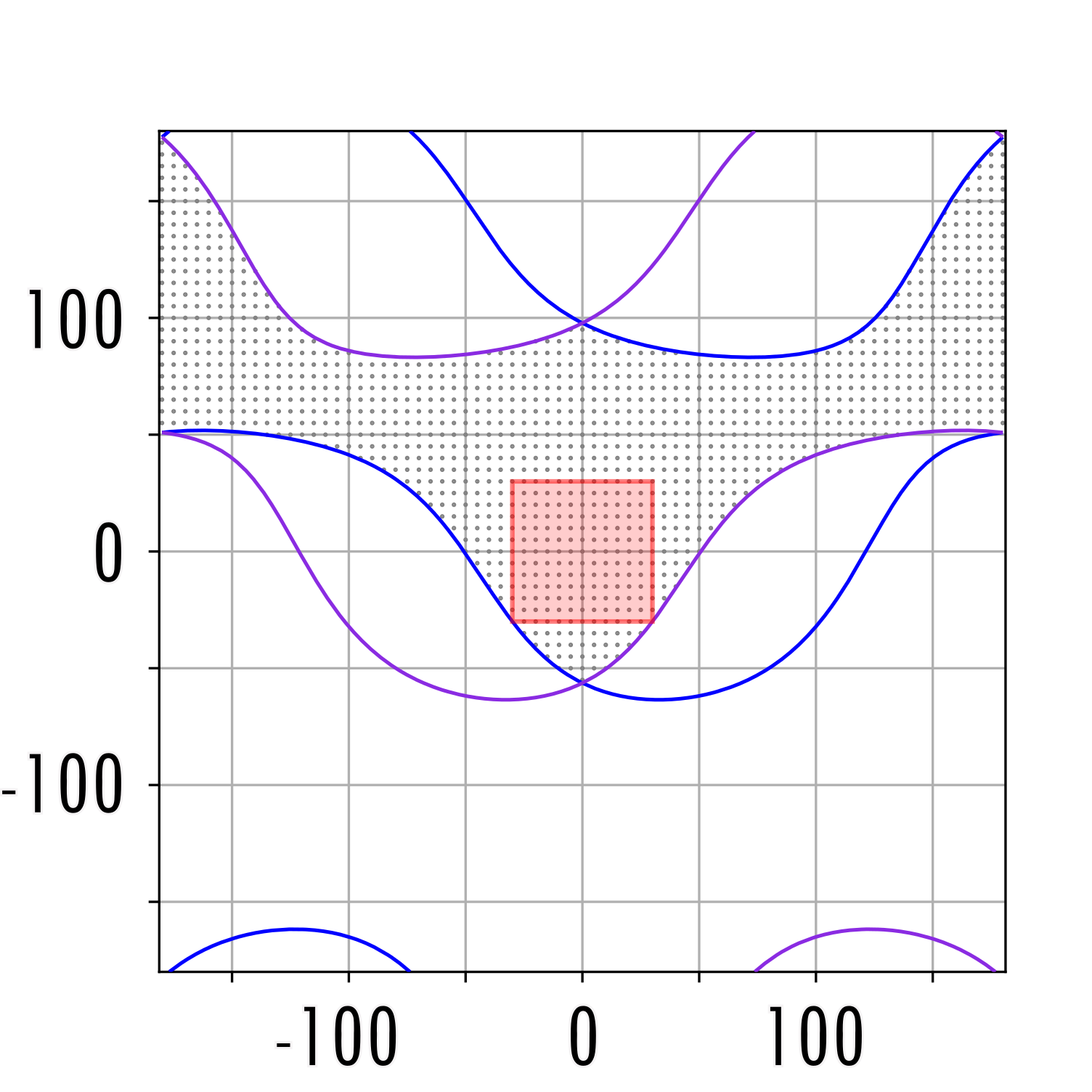
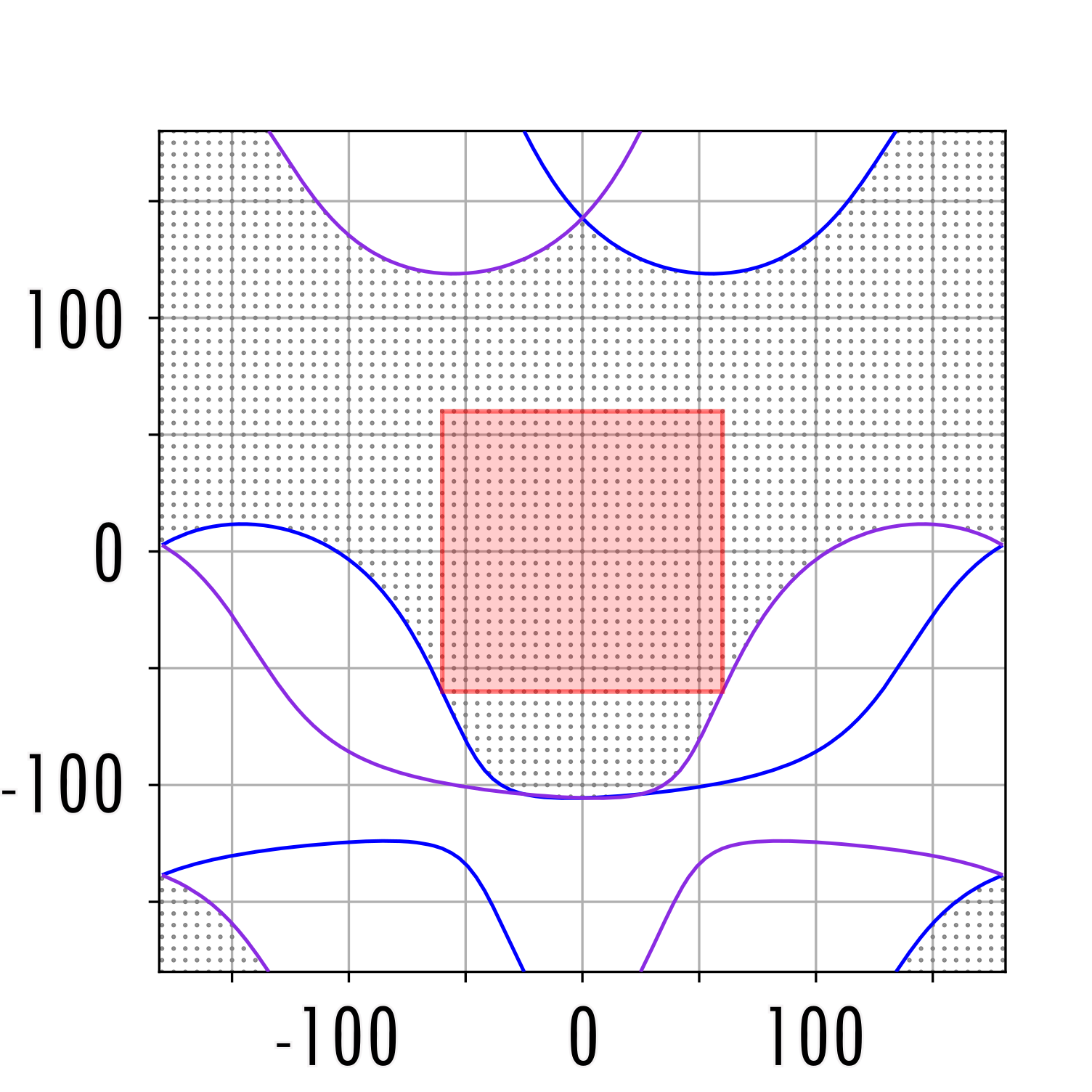
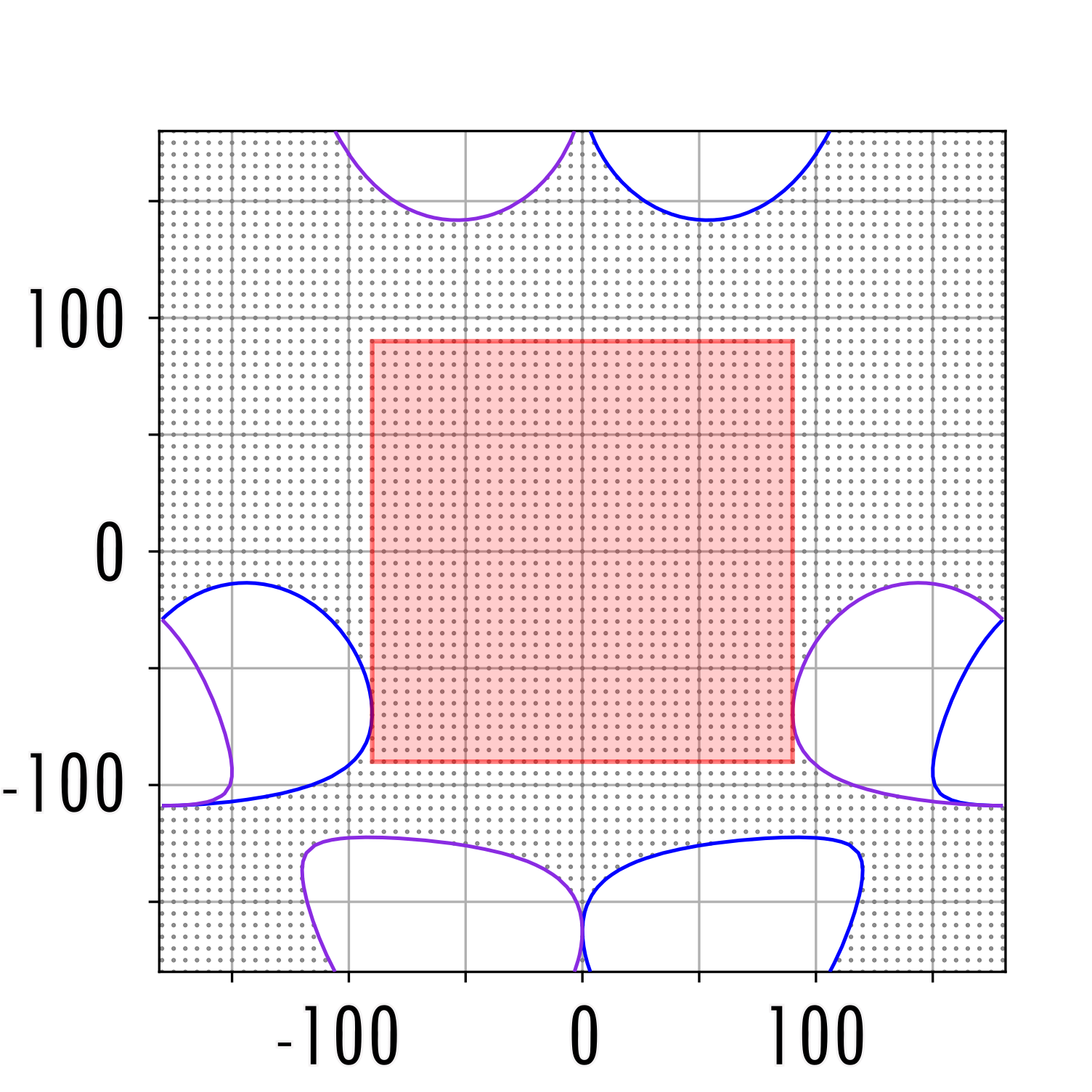
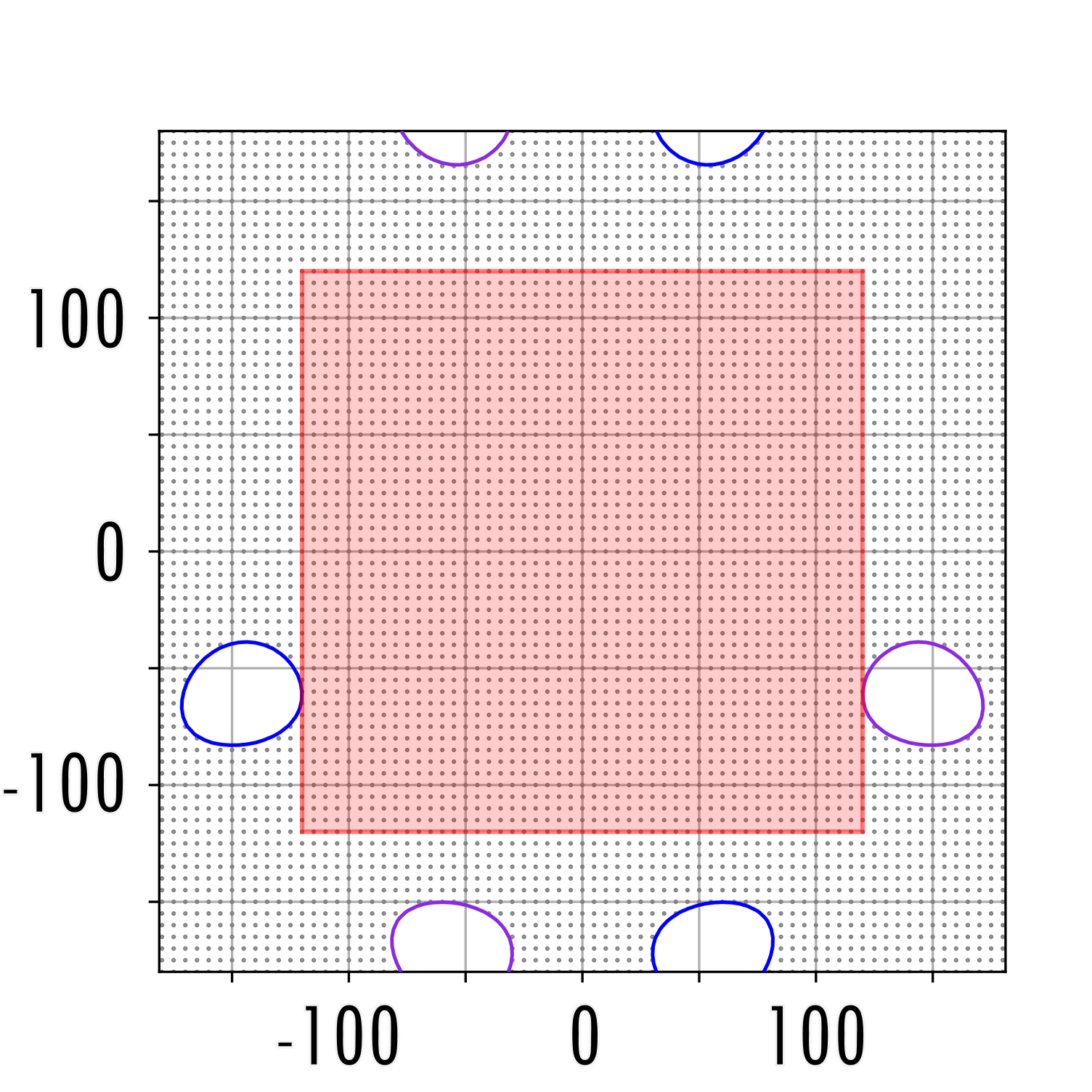
The team introduced a smart way to pick the RSU’s crank and rod lengths so the ankle can reach all the angles needed for walking tasks without “dead spots.” In everyday terms: they set the sizes so the mechanism never gets stuck in the range of motion we care about.
4) Two-stage design-and-compare process
- Stage A: Multi-objective optimization (finding best trade-offs)
- They explored many possible shapes and sizes for each mechanism and set of motors.
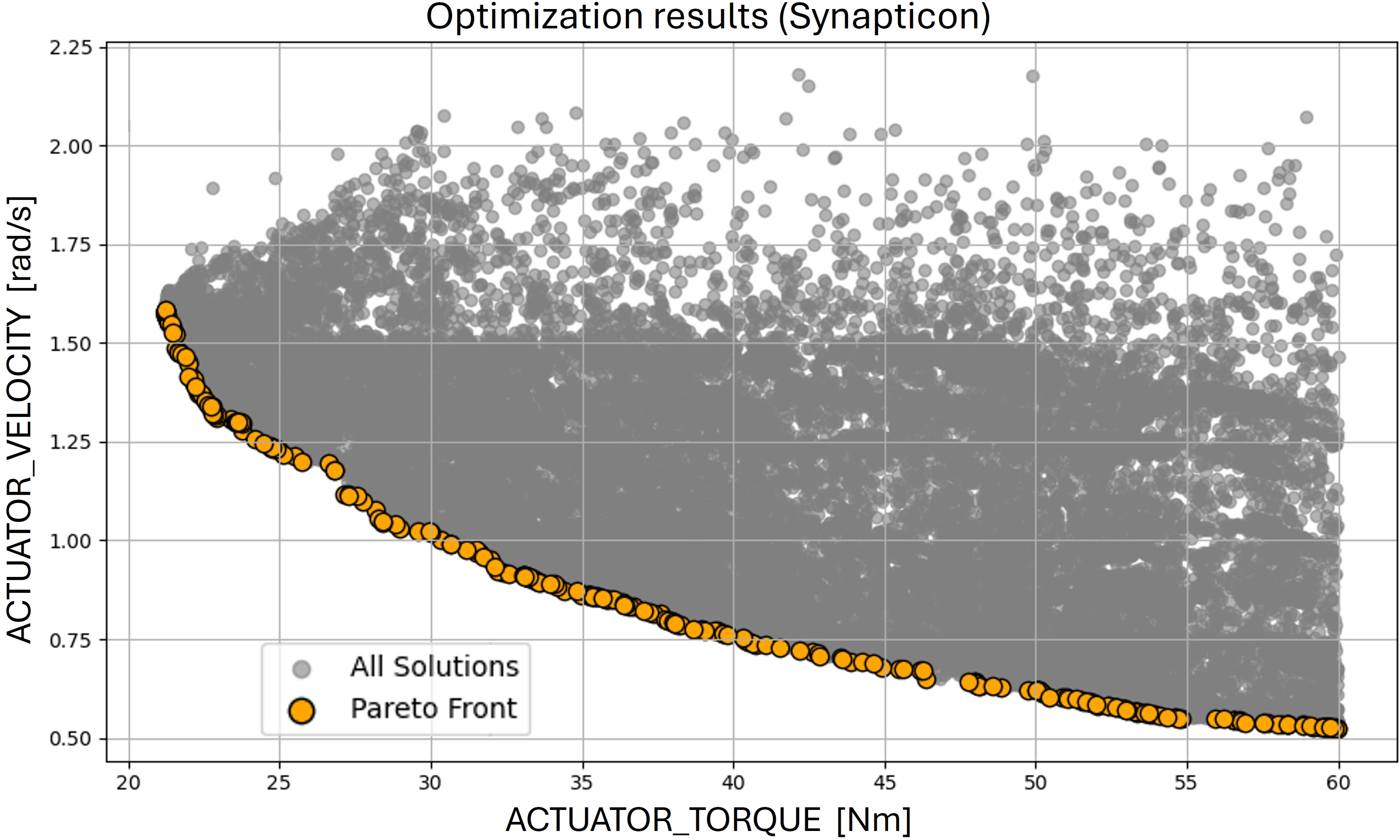
- Goals (to minimize): peak motor force and peak motor speed needed across realistic tasks (walking on flat ground, walking up/down a ramp, climbing a step).
- The result is a “Pareto front,” a set of best trade-offs where improving one goal would hurt the other.
- Stage B: One score to compare everything fairly
- After getting these good candidates, they gave each one a single overall score (a “cost”) by combining several high-level metrics that matter for the ankle itself:
- How fast the ankle can move (roll/pitch)
- How much torque (turning force) it can deliver at the ankle
- How easy it is to move the ankle backward through the mechanism (backdrivability, related to safety and compliance)
- Manipulability (how well it moves in all directions)
- Compactness (how small it is)
- Actuator mass (how heavy the motors+links are)
- Height of the motors’ center of mass (higher tends to help overall balance and energy use)
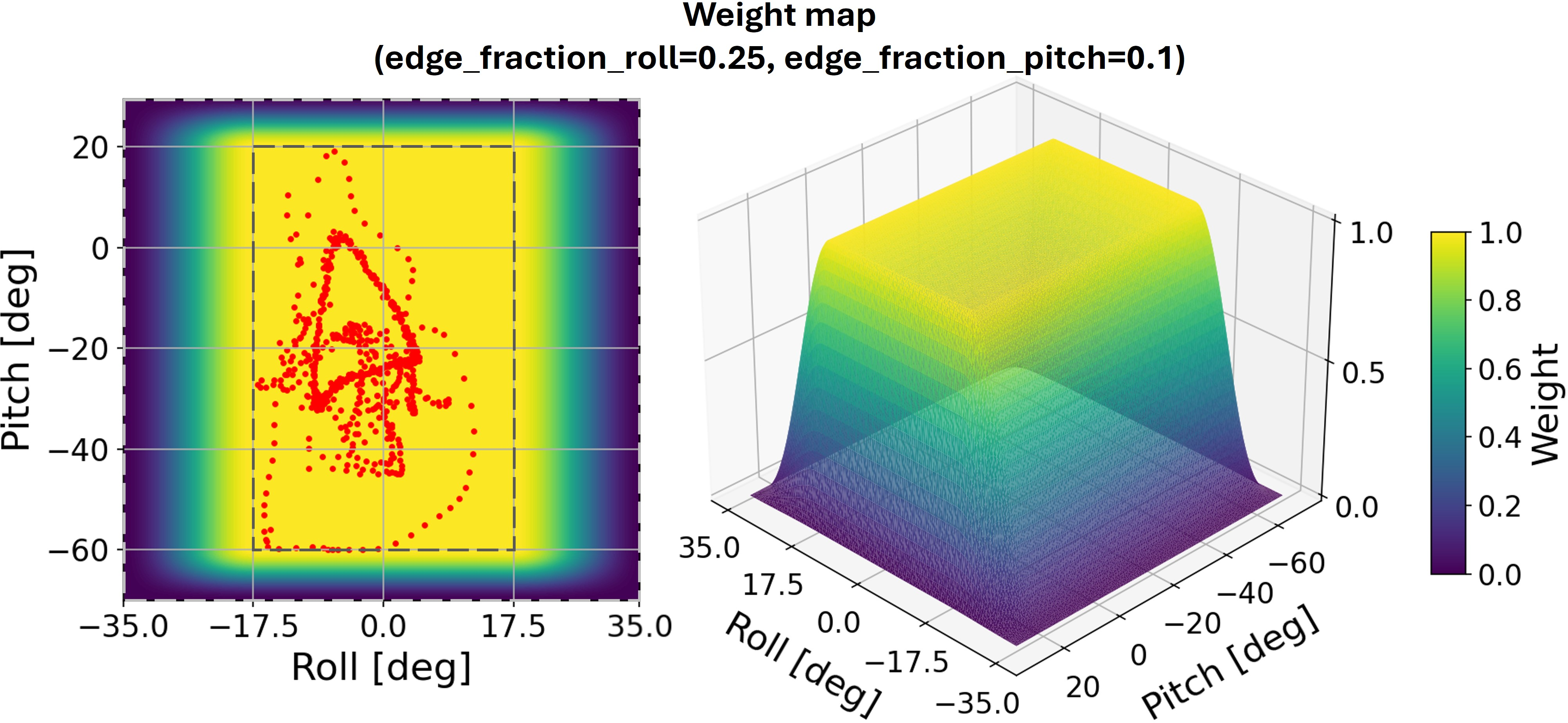
- They measured these over the angles the robot actually uses, giving more weight to the “core” region the robot spends most time in, and less weight to extreme positions.
- Then they normalized all metrics and blended them into one score. Lower score = better overall design.
This two-step method is efficient: the heavy search happens once, and you can reweight the final score later if your priorities change (for example, if you decide safety should matter more than speed).
What they found and why it matters
- The new RSU parameterization works
- They tested many movement ranges and confirmed the RSU design could always move through the required ankle angles without getting stuck. This makes the design safer and more reliable.
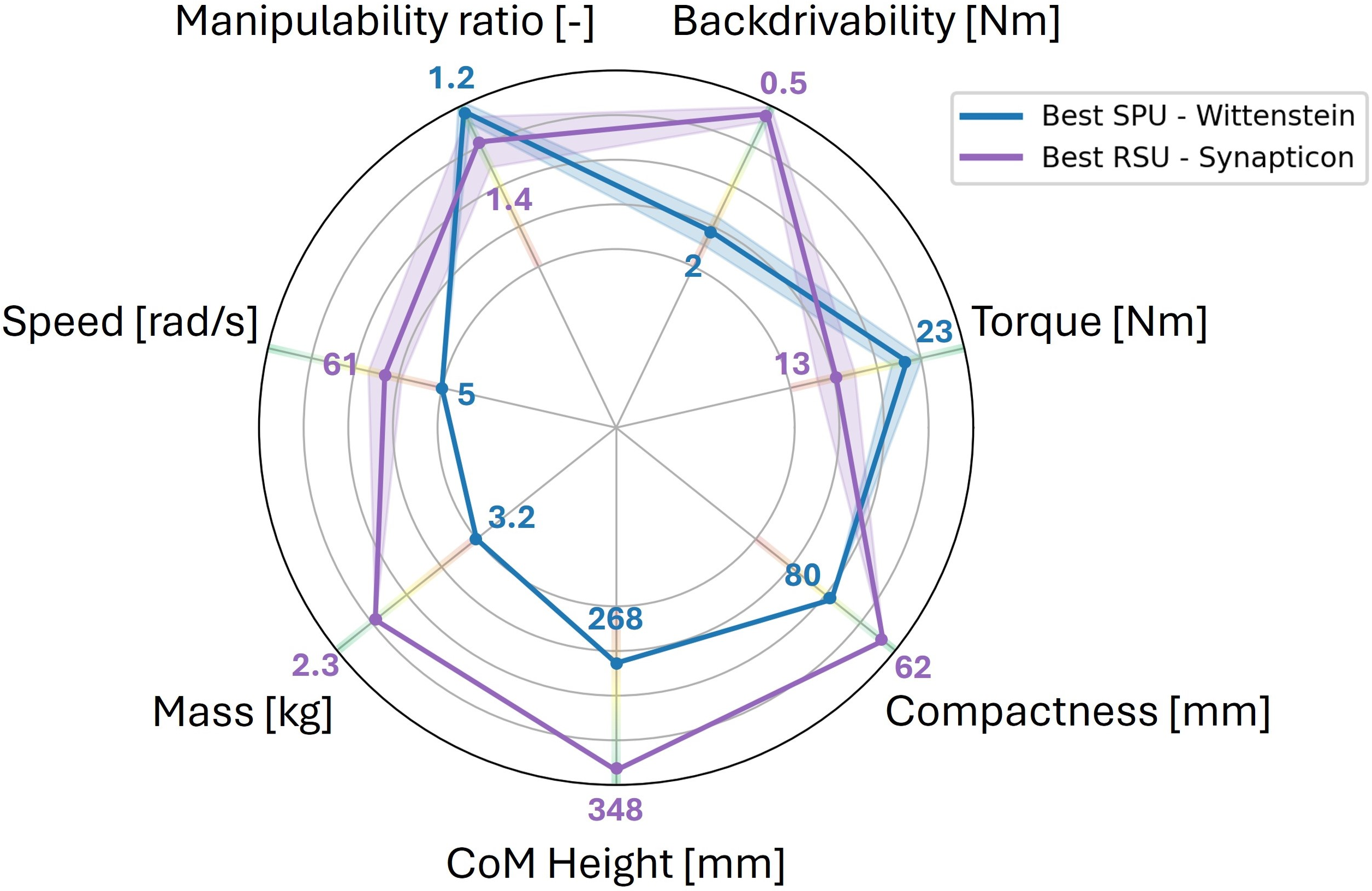
- Best overall designs favored RSU (with rotary actuators)
- When comparing the top SPU and RSU designs, the RSU usually had better speed, torque at the ankle, backdrivability, manipulability, and mass/compactness features.
- SPU had slightly more consistent performance across all angles (less variation), but the RSU’s higher average performance made it the better choice overall.
- Real-world upgrade success
- They redesigned the ankle of an existing humanoid robot using their framework.
- The optimized RSU beat:
- The original serial (non-parallel) ankle by up to 41% (lower cost score).
- A carefully hand-engineered RSU by up to 14%.
- In short: the automated design method found better solutions than the manual approach and clearly improved on the old design.
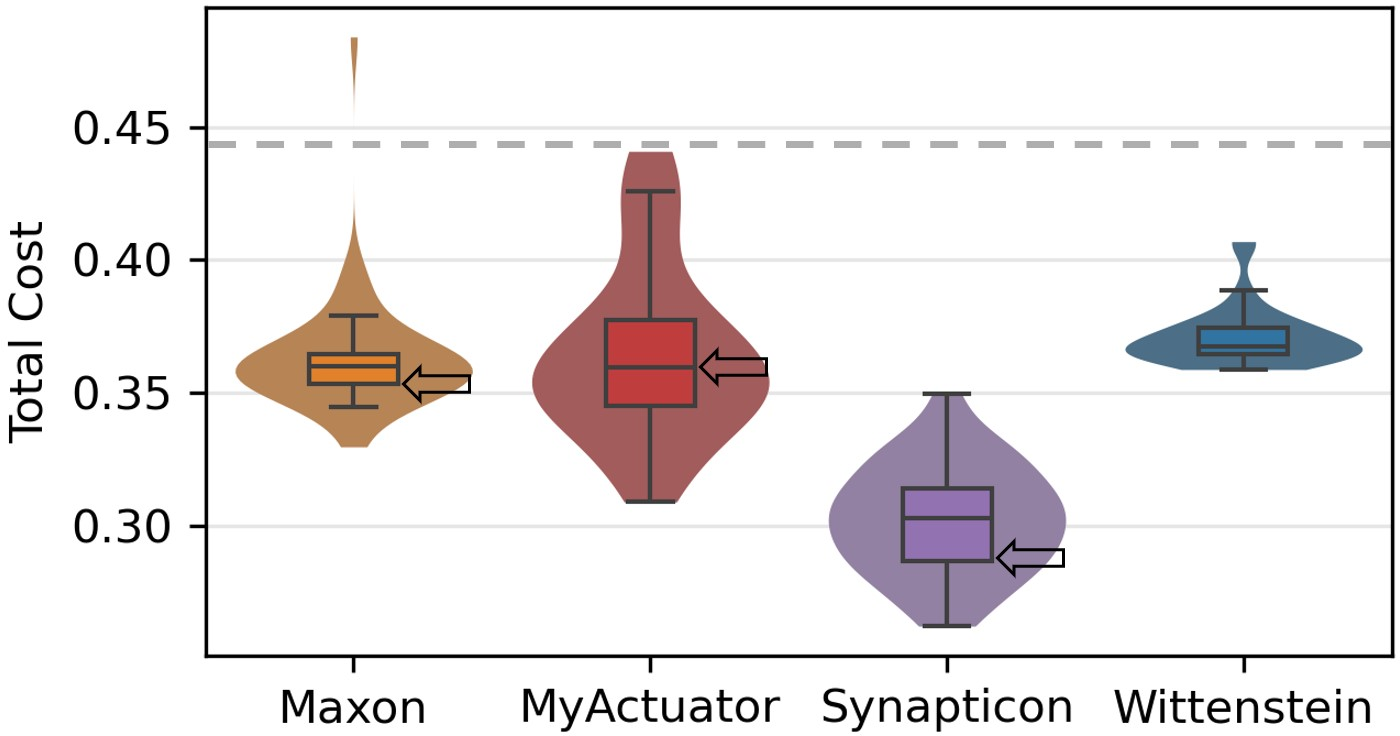
- Fair comparison across different motors and layouts
- They tried several commercial actuators and used the same scoring method to compare them fairly, showing which combinations worked best for the chosen tasks.
What this means for the future
- Smarter, safer, and more agile robot ankles: The framework helps designers pick the right mechanism, geometry, and motors so humanoid robots can walk more smoothly, handle uneven ground, and better absorb bumps without damage.
- Faster development: Because the scoring step is separate from the heavy search, teams can quickly adjust priorities (like favoring compactness over speed) without redoing everything.
- General tool, beyond one robot: Although they focus on two popular parallel ankle types (SPU and RSU), the method can be extended to other designs and even used to fairly compare serial and parallel joints.
- Better use of off-the-shelf parts: The process shows how to choose commercial actuators that fit both performance and safety needs for human-like motion.
In short, this research gives a clear, practical roadmap for building better robot ankles—ones that are lighter at the foot, more controllable, safer to interact with the world, and better suited to real walking tasks.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise list of what remains missing, uncertain, or unexplored in the paper, articulated to enable concrete follow-up work.
- Limited architecture scope: only SPU and RSU (2-DoF roll/pitch) are analyzed; other parallel ankle architectures (e.g., UPS/RUS/PRU, 3-RPS, serial–parallel hybrids) and 3-DoF ankles including yaw are not evaluated or supported in the framework.
- No dynamic/structural modeling: the analysis is kinematic/Jacobian-based; stiffness, compliance, vibration modes, deflection under load, and structural safety (e.g., via FEA) are not modeled or optimized.
- Backdrivability/friction simplification: backdriving torque uses manufacturer static friction; dynamic friction, stick–slip, cogging torque, backlash, gearbox efficiency, and temperature-dependent behavior are not accounted for.
- Energy and thermal performance absent: objectives ignore time-integrated energy consumption, efficiency, actuator heating, and thermal limits during tasks.
- Task set breadth: validation tasks cover walking, ramp ascent, and 20 cm step transitions; highly dynamic maneuvers (running, jumping, push recovery, foot scuffing), uneven terrain, and shock/impact loads at heel-strike/toe-off are not included.
- Experimental hardware validation missing: the optimized RSU/SPU designs are not built and tested on a physical robot; no measured gait quality, energy use, robustness, or safety outcomes under control are reported.
- Singularities handled only by existence: the RSU reparameterization ensures IK existence but does not guarantee practical singularity margins, conditioning, or avoidance along trajectories; control behavior near singularities is not studied.
- IK branch management: RSU closed-form IK admits two solutions; strategy for branch selection, hysteresis, and avoidance of configuration flips during continuous motion is not addressed.
- Packaging/collision guarantees incomplete: RSU reparameterization does not inherently enforce geometric packaging or dynamic clearance; collision constraints are “manually defined” and not systematically integrated or validated across the full motion envelope.
- Joint limit treatment: realistic angular limits and friction/compliance in spherical and universal joints are not modeled; potential limit violations under tasks are not checked.
- Whole-body effects omitted: CoM height is computed for actuator/link subsets; impact on whole-limb/robot CoM, whole-body dynamics, balance margins, and energy expenditures is not analyzed.
- Cost function normalization dependence: min–max scaling is performed over the candidate population, making rankings dependent on the set composition; absolute benchmarks and normalization sensitivity are not studied.
- Weight selection and sensitivity: equal metric weights are used; no sensitivity analysis, multi-criteria preference exploration, or task-specific weight determination (e.g., via user studies or optimization) is provided.
- Region-based weighting rationale: choice of core/extended regions and raised-cosine taper is heuristic; robustness of rankings to region definitions and grid resolution is not analyzed.
- Objective function scope: multi-objective optimization minimizes peak actuator force/velocity only; important criteria like energy, thermal load, fatigue life, noise, reliability, manufacturability, and maintenance are not optimized.
- Robustness to uncertainty: manufacturing tolerances, sensor/estimation errors, friction variability, and wear are not modeled; no robust optimization or Monte Carlo analysis of parameter uncertainties is performed.
- Actuator selection breadth: SPU uses a single linear actuator variant (AL32, 2 mm lead) and RSU uses three rotary actuators; systematic exploration of alternative leads, transmissions, custom actuators, or variable-stiffness/series elastic options is absent.
- Control co-design: controller bandwidth, impedance control, and interaction with mechanical compliance/backdrivability are not co-designed or evaluated; no closed-loop performance metrics are included.
- Workspace assumptions: analysis focuses on orientation (roll/pitch) rectangles; foot pose translations and compliance at the contact (micromotions required during stance) are not considered, potentially limiting realism.
- Optimization details/reproducibility: NSGA-II hyperparameters, convergence diagnostics, runtime, and reproducibility are not reported; alternative solvers, surrogate modeling, or gradient-based methods are not compared.
- Correlation to real performance: the scalar cost’s predictive validity for actual locomotion quality, safety, and efficiency is not established via empirical correlation.
- Incomplete reporting: the comparison with the original serial architecture appears truncated in the text; full quantitative details and metrics are missing.
- Lifecycle and environmental factors: durability, wear, sealing, contamination resistance, maintainability, and serviceability of proposed designs are not assessed.
- Integration constraints: cable routing, connectors, sensor placement, and thermal management in tight ankle packaging are not modeled or constrained in the design space.
- Safety margins: margin to structural failure, to actuator saturation, and to singularities under worst-case perturbations is not quantified; no fault tolerance or failure-mode analysis is provided.
Practical Applications
Immediate Applications
The following applications can be implemented now by leveraging the paper’s unified ankle design framework, closed-form kinematics, RSU reparameterization, and comparative cost-based evaluation.
- Robotics industry — Upgrade existing humanoid ankles to parallel architectures (RSU/SPU) using the paper’s workflow
- Use the multi-objective optimization per actuator-architecture pair to synthesize geometry, apply the RSU reparameterization to guarantee workspace coverage for task-defined roll/pitch regions, and rank candidates with the scalar cost function across the seven metrics (speed, torque, backdriving torque, manipulability, compactness, actuation mass, CoM height).
- Expected outcomes: lower distal mass, improved backdrivability and robustness to terrain; empirically supported by up to 41% cost reduction vs serial and 14% vs an engineered RSU.
- Potential workflow/product: “Ankle Design Assistant” plugin for CAD (Grasshopper) + Python NSGA‑II (Tunny), with actuator libraries and region-based weighting presets for common tasks (ramps, steps, dynamic gait).
- Dependencies/assumptions: accurate actuator data (nominal speed/torque, friction), reliable CAD mass and geometry, defined operational/core regions from target tasks, collision constraints, min–max normalization across candidate sets, and appropriate metric weights.
- Robotics startups — Actuator selection and procurement guidance for parallel ankles
- Use the framework’s cross-architecture cost to compare low-reduction rotary actuators vs linear actuators in SPU/RSU, including trade-offs in compactness, manipulability, and backdrivability.
- Potential tools/products: “Cross-Architecture Ankle Scorecard” that converts datasheets into normalized performance estimates; reference RSU parameter generator (γ, δ) to ensure feasibility in specified task regions.
- Dependencies/assumptions: consistent test tasks and weighting map; availability of low-reduction rotary gearboxes (9:1–19:1) to retain backdrivability; validation on platform-specific constraints.
- Academic research — Reuse of closed-form IK and Jacobian-based analysis for SPU/RSU
- Adopt the provided closed-form inverse kinematics for SPU and RSU and the manipulability analysis for singularity avoidance and curriculum development.
- Use the RSU reparameterization to guarantee solvable IK across a predefined task envelope and to study alignment singularities systematically.
- Dependencies/assumptions: correct implementation of equations and existence conditions; faithful reproduction of the operational region and weighting; experimental validation of friction/backdrive thresholds.
- Education (engineering courses and capstone projects) — Hands-on design-to-evaluation pipeline
- Turn the paper’s pipeline (task definition → operational region → geometric synthesis → optimization → normalized cost ranking → CAD integration) into a course module or senior project.
- Potential tools: small-scale kits with commercial actuators and printable linkage parts; graded assignments on metric weighting and Pareto trade-offs.
- Dependencies/assumptions: access to Grasshopper/Python/NSGA‑II or equivalent toolchain; simplified collision and manufacturability checks; safe lab testing protocols.
- Actuator vendors — “Framework-ready” datasheets and design services
- Provide friction, backdrive torque, mass, and geometry models in a format consumable by the optimization pipeline to enable accurate normalized comparisons across catalog devices.
- Offer co-design services (linkage mass estimates for RSU crank/rod) and parametric CAD for rapid feasibility checks.
- Dependencies/assumptions: transparent, standardized datasheet fields; joint characterization under typical humanoid duty cycles; shared test protocols with OEMs.
- Test and validation teams — Region-based performance maps for ankle certification
- Use the raised-cosine weighting approach to report averaged and variance metrics (speed/torque/backdrive/manipulability) over core and extended regions, supporting design gates and regression tracking.
- Potential workflow: publish radar plots for candidates; track core-region stability vs extended-region degradation as tasks evolve.
- Dependencies/assumptions: stable definition of core/extended regions; consistent measurement methods; normalization scope fixed per comparison set.
- Hobbyist and prototyping communities — Rapid RSU/SPU ankle builds for small bipeds/exosuits
- Apply simplified versions of the framework to select actuators and linkage dimensions that maintain IK solvability and avoid singularities for common motions (flat ground, mild ramps).
- Dependencies/assumptions: scaled-down geometry, cost function weights tuned for compactness and mass; off-the-shelf safety margins; limited terrain variability.
Long-Term Applications
The following applications will likely require further research, scaling, productization, or standardization before broad deployment.
- Robotics industry — Modular, standardized parallel-ankle units for humanoids
- Productize RSU/SPU ankles with configurable operational region presets, built-in workspace guarantees (γ, δ parameterization), and cross-architecture scorecards for procurement.
- Sector: robotics manufacturing.
- Dependencies/assumptions: interface standards (mechanical/electrical), robust manufacturability and reliability testing, field serviceability, and lifecycle support.
- Healthcare — Exoskeleton and prosthetic ankle design informed by backdrivability and manipulability metrics
- Extend the framework to human-interactive devices prioritizing safety, energy dissipation, and adjustable compliance; tailor region-based weighting to typical gait envelopes.
- Sector: healthcare/assistive devices.
- Dependencies/assumptions: clinical constraints (weight, comfort), regulatory approvals, human-in-the-loop contact modeling, expanded metrics for comfort/safety.
- Whole-limb co-design — Integrate ankle optimization with knee/hip (and wrist) parallel mechanisms
- Expand the methodology to multi-joint co-optimization (including yaw), coupling mass distribution and compliance across the leg or arm for global agility and energy efficiency.
- Sector: humanoid robotics and manipulation.
- Dependencies/assumptions: extended kinematics and singularity analysis, multi-joint collision and packaging constraints, computational scalability, controller co-design.
- Digital twin and cloud design services — Automated trade-off exploration at scale
- Offer “Design-as-a-Service” platforms that run large NSGA‑II sweeps, parameterization routines, and cost rankings in the cloud, linked to CAD and procurement systems.
- Sector: software/services for robotics OEMs.
- Dependencies/assumptions: scalable compute, secure data pipelines for OEM tasks and IP, standardized actuator/linkage libraries, robust result reproducibility.
- AI-driven co-design — Joint optimization of morphology and control
- Combine the framework with learning-based controllers and trajectory optimization to simultaneously tune geometry, actuation, and control policies for target task suites.
- Sector: robotics AI/software.
- Dependencies/assumptions: stable sim-to-real pipelines, controller robustness, safety monitors, extended metrics (energy, fatigue, reliability).
- Standards and policy — Benchmarking and procurement guidelines for humanoid ankles
- Develop sector-wide specifications for backdrivability, manipulability ratios, compactness, and CoM height, with region-based reporting to compare designs apples-to-apples.
- Sector: policy/standards (robotics safety and performance).
- Dependencies/assumptions: consensus on metric definitions and weighting, test protocols, independent certification bodies, alignment with safety regulations.
- Terrain-aware design libraries — Task-specific operational regions and weighting maps
- Curate open libraries of gait tasks (ramps, stairs, uneven terrain) mapping to operational regions and weighting tapers, enabling rapid, application-specific ankle design.
- Sector: academia/industry collaboration.
- Dependencies/assumptions: shared datasets, representative task coverage, continuous updates as use-cases evolve.
- Sustainable robotics — Energy-aware ankle designs via mass redistribution and compliance
- Use the framework to reduce distal mass and improve energy efficiency over typical duty cycles; integrate lifecycle analyses (material choices, actuator efficiency).
- Sector: sustainability in robotics.
- Dependencies/assumptions: reliable energy models for tasks, expanded metrics (power, thermal), vendor transparency on efficiency and materials, end-of-life planning.
Notes on key assumptions and dependencies common across applications
- The framework’s comparative validity depends on comprehensive, accurate actuator data (including friction/backdrive characteristics) and realistic task definitions (operational/core regions).
- The scalar cost ranking is sensitive to metric weighting; application-specific tuning is required to avoid bias.
- RSU reparameterization guarantees IK feasibility within the prescribed roll/pitch region but still requires attention to singularity proximity and physical packaging/collisions.
- The current analysis focuses on two degrees of freedom (roll, pitch); yaw or more complex contact dynamics may necessitate model and metric extensions.
- Robustness in real-world deployment depends on manufacturing tolerances, structural stiffness, and controller integration, which are outside the scope of the paper’s geometric/kinematic focus.
Glossary
- Anisotropy: Direction-dependent performance or properties, often indicating uneven capability across axes. "anisotropic behavior"
- Backdrivability: The ability of a mechanism or actuator to be driven backward by external forces with low resistance, improving safety and compliance. "high backdrivability"
- Backdriving Torque: The torque required at the output (ankle) to overcome actuator friction when backdriven. "Backdriving Torque [Nm]: roll and pitch torques required at the ankle joint to overcome static friction at the actuators (using manufacturer-specified data)."
- Closed-form IK: An analytical solution to the inverse kinematics problem, avoiding numerical solvers. "based on closed-form IK (Sec. \ref{sec:kinematic_analysis})"
- Closed kinematic chain: A linkage containing one or more loops, leading to loop-closure constraints. "A closed kinematic chain is defined as any kinematic chain that contains one or more loops in its connectivity graph representation"
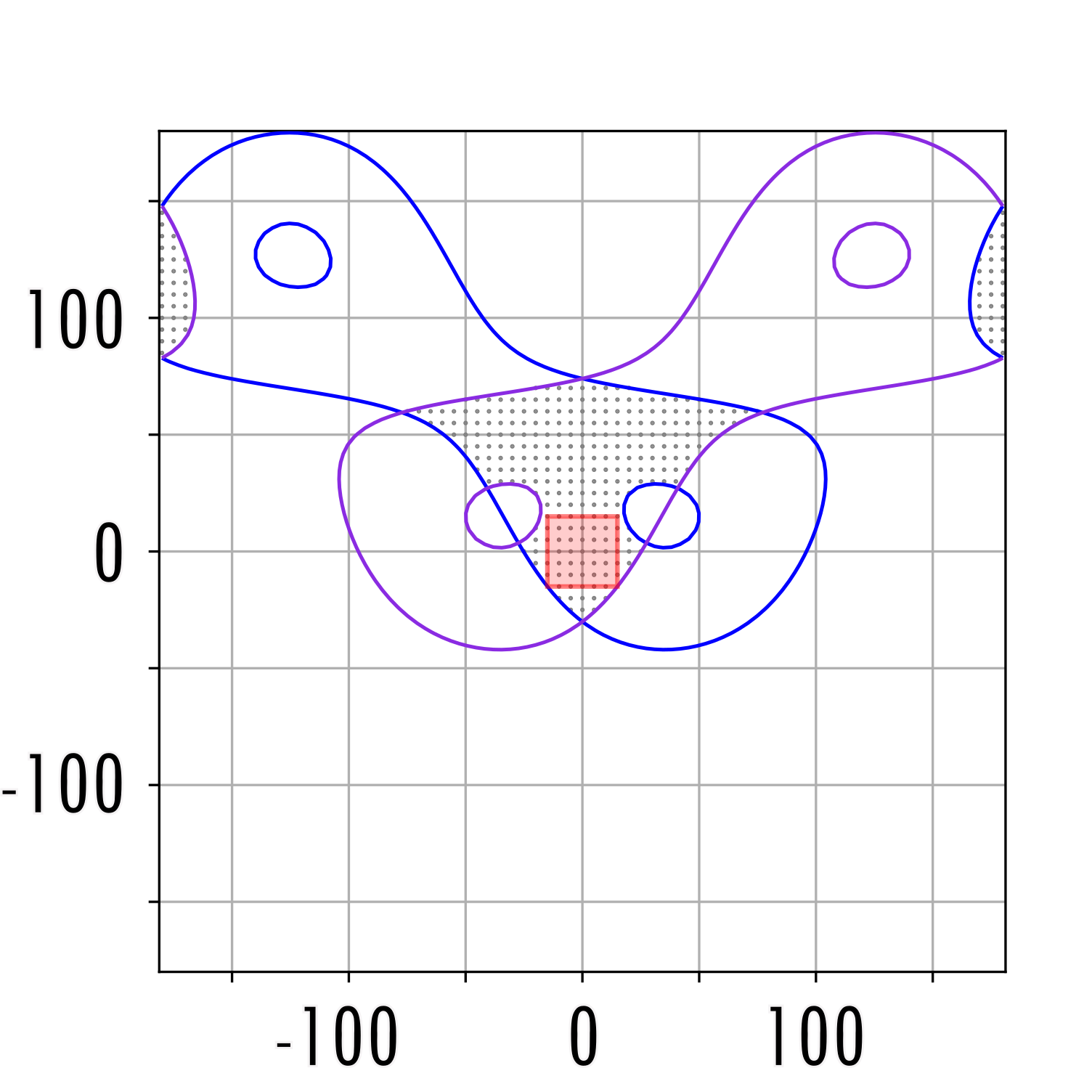
- Configuration space: The set of configurations a mechanism can achieve (often plotted over task angles), indicating feasibility regions. "the configuration space of the mechanism"
- Connectivity graph: A graph-based representation of a mechanism where links are nodes and joints are edges. "connectivity graph representation"
- Convex combination: A weighted linear combination of values with weights summing to one, used to bound parameters. "can be expressed as a convex combination"
- End-effector (EE): The moving platform or output link of a mechanism that performs the task. "end-effector (EE)"
- Feasible set: The set of design parameters that satisfy all constraints in an optimization. "feasible set "
- Grübler-Kutzbach criterion: A mobility formula used to compute the degrees of freedom of mechanisms. "can be evaluated using the Grübler-Kutzbach criterion"
- Inverse kinematics (IK): The computation of joint variables that achieve a desired end-effector pose. "The inverse kinematics (IK) problem"
- Isotropy: Direction-independent performance; uniform capability in all directions. "a property known as isotropy."
- Jacobian matrix: The configuration-dependent matrix mapping joint velocities to end-effector twist and relating wrenches to joint torques. "The Jacobian matrix is a fundamental tool in the differential analysis of mechanism motion"
- Loop closure equations: Constraints ensuring that all kinematic loops close consistently, central to IK of closed chains. "The loop closure equations, which are essential for the kinematic analysis of these mechanisms,"
- Manipulability ellipsoid: A geometric construct derived from the Jacobian that visualizes directional motion/force capabilities. "The manipulability ellipsoid is a valuable geometric construct"
- Manipulability ratio: A scalar measure (sqrt of max/min eigenvalues of JJT) indicating isotropy of motion/force capability. "Manipulability Ratio [--]: as defined in \eqref{eq:manipulability_ratio}."
- Multi-objective optimization: An optimization framework that balances competing objectives simultaneously. "A multi-objective optimization synthesizes the mechanism geometry"
- NSGA-II algorithm: A popular evolutionary algorithm for multi-objective optimization and Pareto-front approximation. "solved with the NSGA-II algorithm"
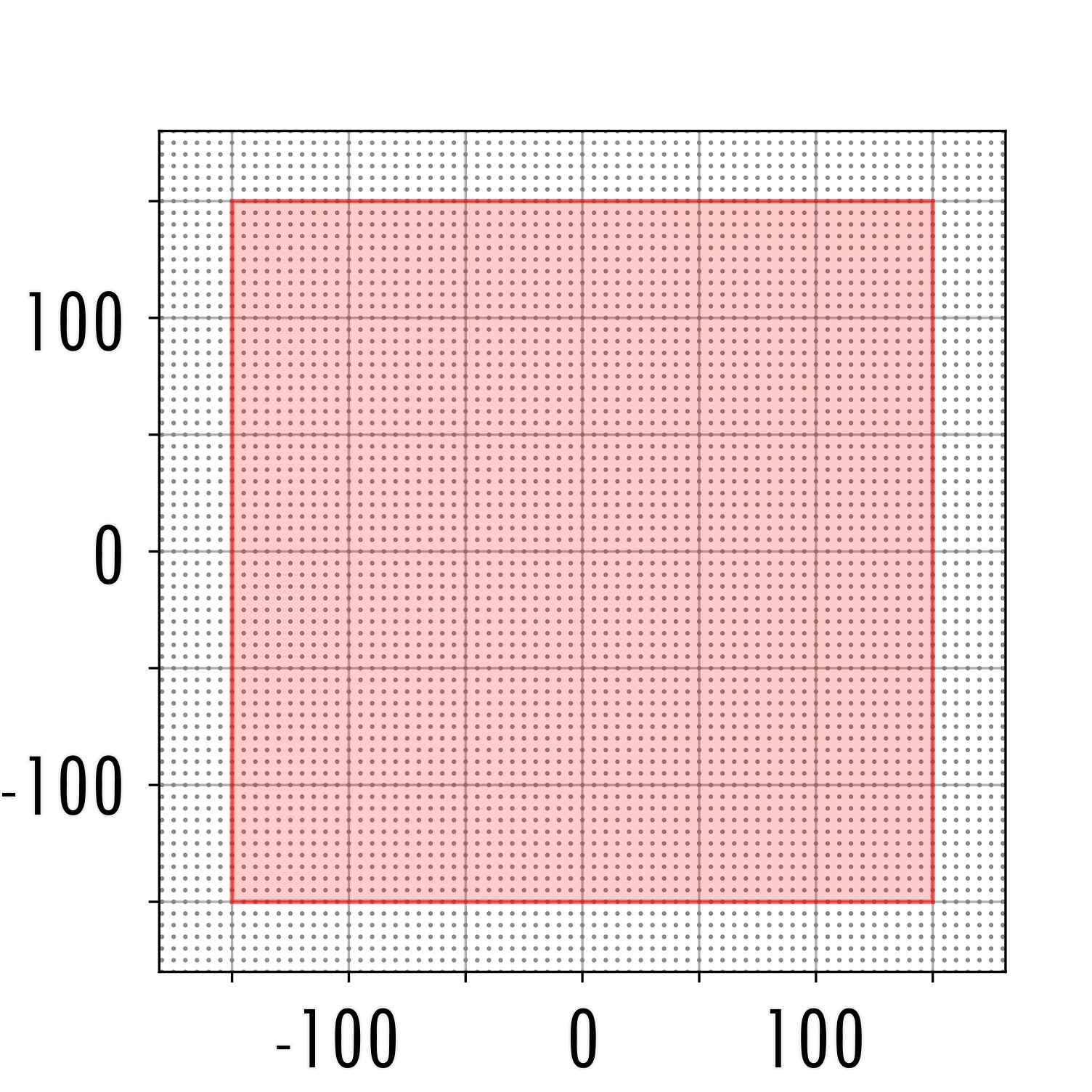
- Operational region: The required range of output orientations (e.g., roll/pitch) that the mechanism must achieve. "desired operational region"
- Parallel mechanisms: Closed-loop architectures with multiple legs connecting a base to a moving platform. "Parallel mechanisms represent a distinct class of mechanical systems"
- Pareto front: The set of non-dominated solutions representing trade-offs among objectives. "defines the Pareto front."
- Planetary gearboxes: Compact epicyclic gear trains often used to achieve gear reduction in actuators. "low-reduction planetary gearboxes (ratios 9:1--19:1)"
- Raised cosine taper: A smooth weighting function that decays to zero at the boundary of a region. "raised cosine taper"
- Reparameterization: Redefining design parameters to ensure properties like IK existence across a target region. "perform a reparameterization of the mechanism"
- Revolute joint: A 1-DoF rotational joint about a fixed axis. "actuated revolute joints"
- Revolute-Spherical-Universal (RSU) mechanism: A parallel architecture whose legs comprise a revolute, spherical, and universal joint. "the Revolute-Spherical-Universal (RSU) mechanism"
- Scalar cost function: A single aggregated measure combining multiple normalized performance metrics for comparison. "evaluated using a scalar cost function"
- Singular configurations: Configurations where the Jacobian loses rank, causing loss of controllability or infinite internal forces. "identifying singular configurations"
- Spherical-Prismatic-Universal (SPU) mechanism: A parallel architecture whose legs comprise spherical, prismatic, and universal joints. "the Spherical-Prismatic-Universal (SPU) mechanism"
- Spherical joint: A 3-DoF ball-and-socket joint allowing rotation about all axes. "feature a spherical joint"
- Twist: The 6D vector of linear and angular velocity of a rigid body. "the resulting twist (linear and angular velocities) of the EE"
- Universal joint: A 2-DoF joint allowing rotation about two orthogonal axes. "a single universal joint"
- Wrench: The 6D vector of forces and torques applied to a rigid body. "the wrench (forces and torques) applied at the EE"
- Workspace feasibility: The property that valid IK solutions exist throughout the specified operational region. "ensures workspace feasibility"
Collections
Sign up for free to add this paper to one or more collections.