- The paper presents a framework analyzing how proportional curvature feedback influences equilibrium shapes in slender soft robots under self-weight.
- It introduces a continuum model using Gaussian kernels to simulate finite sensor and actuator resolution, revealing bifurcation phenomena and morphological instabilities.
- The study demonstrates that optimal feedback gain selections can minimize shape error, thereby informing integrated hardware and control design for practical soft robotics.
Morphologies of a Sagging Elastica with Intrinsic Sensing and Actuation
Introduction and Motivation
This work presents a comprehensive theoretical and computational study of shape morphing in slender soft robots modeled as planar elastica, focusing on the interplay between intrinsic sensing and actuation. The central challenge addressed is the design and control of soft robotic devices capable of programmable shape change, given the practical constraints of limited sensor and actuator density, geometric nonlinearity, and feedback errors. The authors develop a continuum model that incorporates distributed curvature sensing and moment-generating actuation, parameterized by spatial filtering kernels representing the finite resolution of embedded sensors and actuators. The study systematically explores how proportional feedback strategies—where actuation is proportional to sensed curvature—affect the equilibrium morphologies and stability of the device under self-weight.
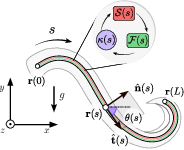
Figure 1: Schematic of a slender soft-robot (elastica) with distributed sensors and actuators, illustrating the feedback loop from curvature sensing to actuation.
Mathematical Model and Feedback Architecture
The elastica is described by the planar Kirchhoff rod equations, with the centerline parameterized by arc length s and local tangent angle θ(s). The internal moment m(s) comprises a passive elastic component Bpκ(s) and an active component ma(s) generated by feedback. Sensing and actuation are modeled as spatial convolutions with Gaussian kernels of widths σ (sensing) and γ (actuation), capturing the effects of finite sensor/actuator density. The feedback law is proportional: ma(s)∼F(s), where F(s) is a filtered version of the sensed curvature S(s).
The governing equilibrium equation is:
Bpds2d2θ+dsdma−ρg(L−s)cosθ=0
with geometric constraints dx/ds=cosθ, dy/ds=sinθ.
Regimes of Sensing and Actuation
The analysis considers four canonical regimes:
- Local Sensing and Actuation (σ,γ→0): Idealized case with dense sensors/actuators, yielding pointwise feedback. The system is governed by a single gravito-bending number Geff, and the device can be straightened efficiently by increasing feedback gain.
- Global Sensing and Actuation (σ,γ→L): Sensing and actuation are spatially uniform, sensitive only to net angular change. The device exhibits non-monotonic tip deflection as a function of global feedback gain, with persistent tip curling even at high gravity.
- Mixed Sensing/Actuation (σ or γ finite): One kernel is local, the other nonlocal. The feedback moment is a spatially filtered average of curvature, leading to rich bifurcation phenomena and non-monotonic response as kernel width and gain are varied.
- Nonlocal Sensing and Actuation (0<σ,γ<L): Both kernels are finite, representing realistic devices with limited sensors/actuators. The system exhibits a hierarchy of morphological instabilities and multi-stability, with phase diagrams parameterized by G, A, Ws, and Wa.
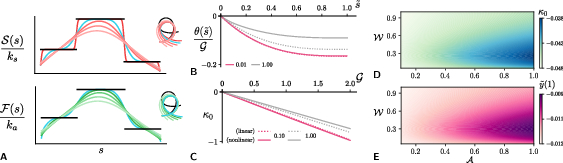
Figure 2: Effects of finite sensor/actuator density on sensing and feedback functions, and comparison of linearized vs. nonlinear solutions for device shape.
Morphological Instabilities and Phase Diagrams
A key result is the identification of bifurcation surfaces in the multi-dimensional parameter space (G,A,Ws,Wa), delineating distinct equilibrium morphologies. For intermediate kernel widths, the device undergoes abrupt shape transitions as feedback gain is tuned, with multiple stable branches corresponding to different deformation modes. The nonlocality of sensing and actuation introduces a trade-off: narrow kernels enable fine feature reproduction but are prone to instability, while wide kernels suppress high-frequency modes but reduce control accuracy.
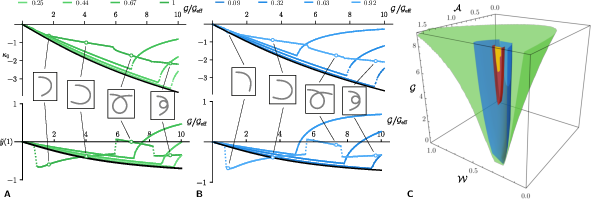
Figure 3: Phase-space diagrams showing bifurcations and morphological transitions as a function of sensing/actuation kernel width and feedback gain.
Shape Morphing and Error Minimization
The framework is extended to complex shape morphing tasks, where the device is required to match a prescribed target curvature profile. The authors introduce an error metric quantifying the deviation between the achieved and target shapes, and demonstrate that for a fixed kernel width, there exists an optimal feedback gain minimizing this error. The locus of minimal error follows a power-law scaling W∗∼(K−K∗)0.5, where K∗ is the critical gain to overcome gravity. This result provides a quantitative guideline for selecting sensor/actuator density and feedback strength in practical soft robotic design.
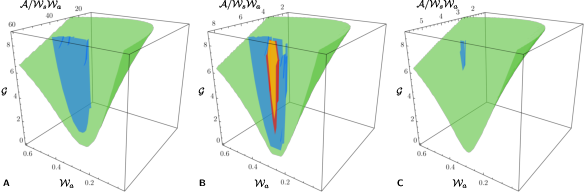
Figure 4: Shape morphing algorithm and error landscape, illustrating optimal combinations of actuation gain and kernel width for minimal shape error.
Implications and Future Directions
The study offers several important insights for the design and control of soft robots:
- Hardware-Software Co-Design: The trade-off between sensor/actuator density and feedback gain is quantitatively characterized, enabling informed choices in hardware design for desired morphing accuracy and stability.
- Control Strategies: Simple proportional feedback can induce complex multi-stability and morphological transitions, necessitating careful tuning to avoid undesired instabilities.
- Generalizability: The theoretical framework is extensible to three-dimensional rods, torsional modes, and more sophisticated feedback laws, with direct relevance to biomedical, service, and bio-inspired robotics.
- Computational Methods: The use of spectral collocation and Clenshaw-Curtis quadrature provides a robust approach for solving nonlinear integro-differential equations in continuum soft robotics.
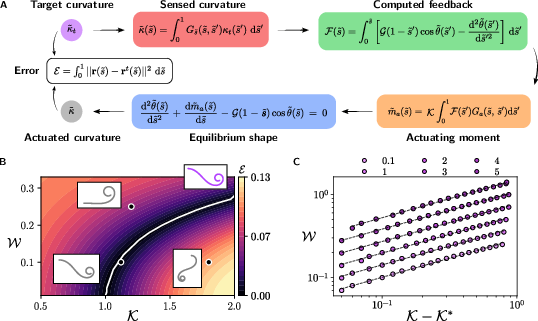
Figure 5: Algorithmic flow for shape morphing with limited sensing and feedback, and contour plot of shape error as a function of actuation gain and kernel width.
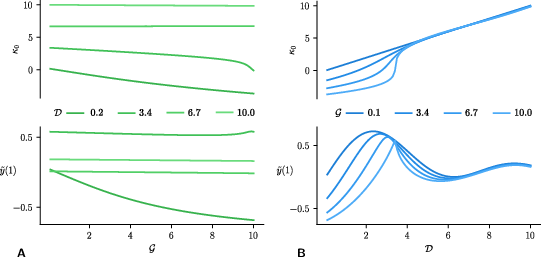
Figure 6: Bifurcation diagrams for shape morphing under uniform global feedback, showing non-monotonic tip deflection and persistent tip curling.
Conclusion
This work establishes a rigorous quantitative framework for understanding and designing shape-morphing soft robots with intrinsic sensing and actuation. By mapping the morphological phase space and elucidating the trade-offs imposed by limited sensor/actuator density and feedback strategies, the study provides actionable guidelines for both theoretical analysis and practical implementation. The results highlight the necessity of co-optimizing hardware and control parameters to achieve robust, accurate, and stable shape morphing in soft robotic systems. Future research may extend these principles to adaptive feedback laws, learning-based control, and multi-material devices, further advancing the capabilities of soft robotics in complex, real-world environments.