- The paper introduces a pragmatic rate-distortion framework that balances communication bit-rate with task-specific distortion in collaborative perception.
- It employs task entropy discrete coding and mutual-information-driven message selection to compress features and eliminate redundant data in multi-agent systems.
- Experimental results on DAIR-V2X and OPV2V demonstrate that RDcomm significantly reduces communication volume while maintaining or improving 3D detection and segmentation accuracy.
Rate-Distortion Optimized Communication for Collaborative Perception
Introduction to Collaborative Perception and Communication Efficiency
Collaborative perception in multi-agent systems aims to enhance environmental understanding by sharing information across different agents. This approach is particularly beneficial for tasks such as 3D object detection and BEV segmentation, where single-agent systems struggle with occlusions and limited fields of view. However, a significant challenge arises in balancing the trade-off between high task performance and communication efficiency. Prior methods, largely heuristic, grapple with achieving this balance without a solid theoretical foundation.
Pragmatic Rate-Distortion Theory
Grounded in information theory, the paper introduces a pragmatic rate-distortion framework tailored for multi-agent systems. This framework provides a theoretical basis for minimizing communication bit-rate while maintaining task-specific distortion within acceptable limits. It innovatively extends Shannon's classical rate-distortion theory by introducing two key aspects: pragmatic distortion and inter-agent redundancy. Pragmatic distortion is distinctly task-oriented, focusing on how message degradation impacts task performance, rather than merely considering fidelity.
RDcomm Framework
The RDcomm framework is proposed to address the trade-off challenges identified by the rate-distortion theory. It introduces two pioneering components: task entropy discrete coding and mutual-information-driven message selection.
Task Entropy Discrete Coding: This component seeks to minimize the task-conditioned entropy by assigning shorter codewords to more pragmatically relevant features. It utilizes a novel layered vector quantization to efficiently compress BEV feature maps, ensuring that task-relevant features are prioritized during coding.
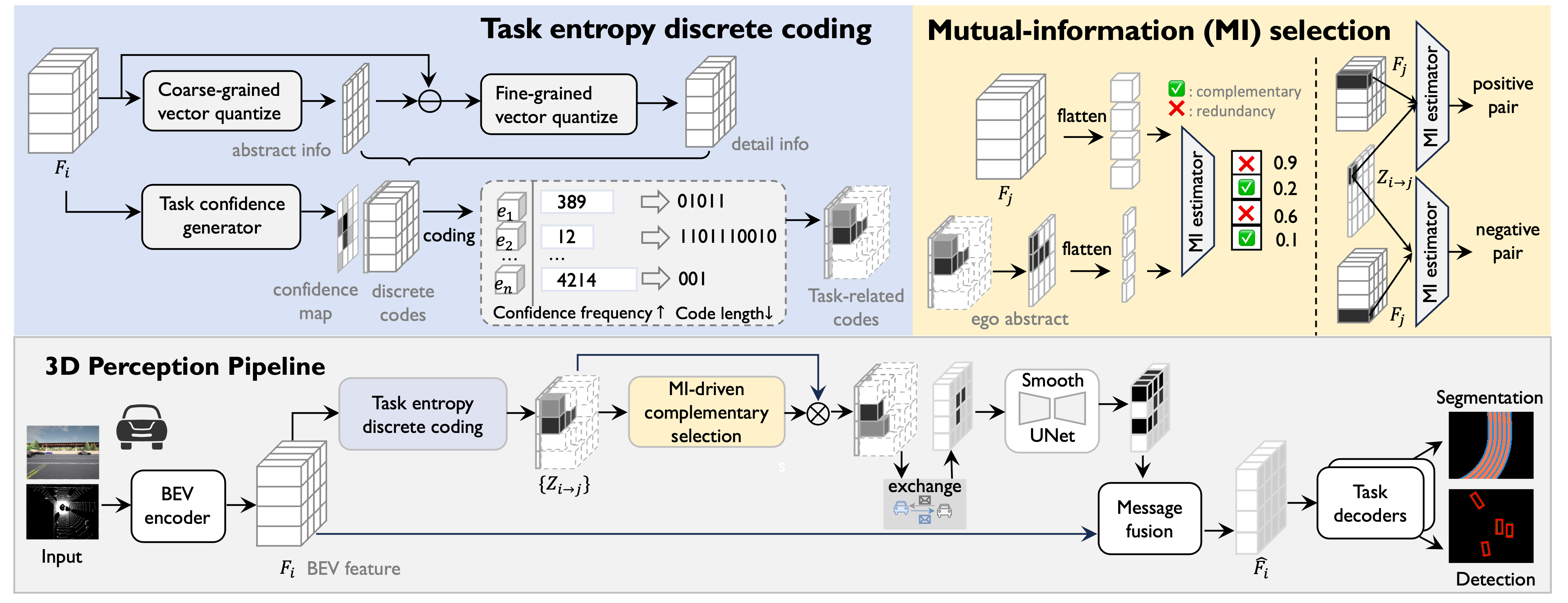
Figure 1: RDcomm features two key components: i) task entropy discrete coding for improving the pragmatic relevance of message, which assigns short codewords to the codes with high confidence frequency; ii) mutual-information-driven message selection, which measures message redundancy by mutual information estimation.
Mutual-Information-Driven Message Selection: To adhere to the redundancy-less condition, this component utilizes neural estimation of mutual information to select only messages that add novel information not already present at the receiving agent. This innovative approach ensures that messages are not merely duplicates of the receiver's existing data.
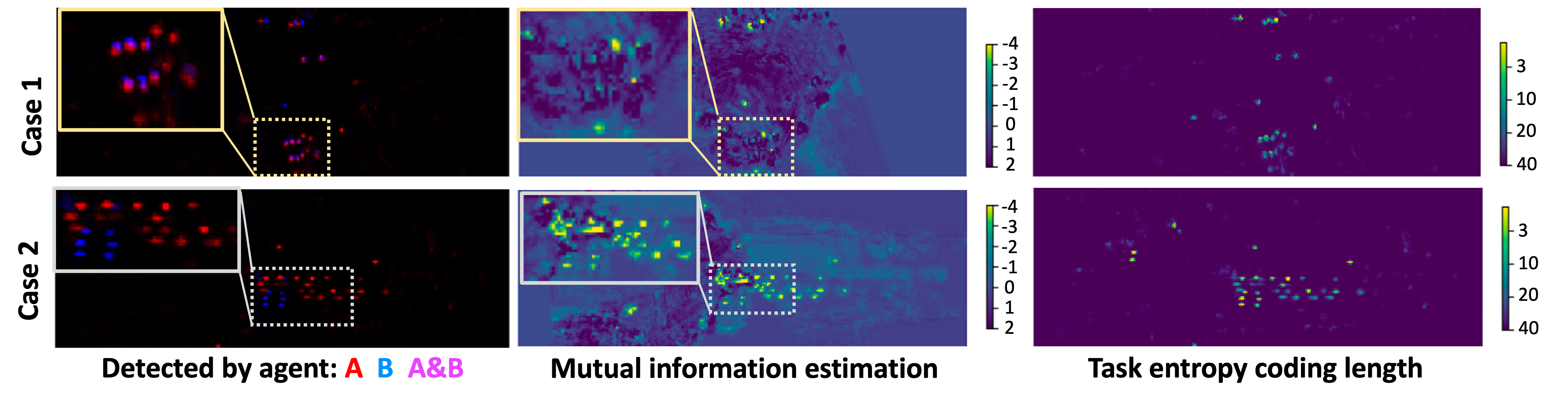
Figure 2: Visualization of mutual information estimation and task entropy coding length on DAIR-V2X.
Experimental Validation
Extensive experiments on real-world and simulated datasets, such as DAIR-V2X and OPV2V, demonstrate RDcomm's superiority in achieving a robust performance-communication trade-off. RDcomm consistently outperforms existing methods by drastically reducing communication volume while maintaining or enhancing accuracy in tasks such as 3D object detection and BEV semantic segmentation.
Implications and Future Directions
The proposed theoretical and practical frameworks mark significant progress in understanding and optimizing communication efficiency in multi-agent perception systems. By grounding communication strategies in a rigorous information-theoretic context, RDcomm sets a precedent for future research in enhancing collaborative AI systems. Future exploration could extend this framework to more diverse tasks, including navigation and scene understanding, and incorporate additional data modalities such as textual descriptions or advanced motion predictions.
In conclusion, this study not only offers a sophisticated theoretical backdrop for multi-agent communication but also delivers a practical, efficient framework demonstrably better at navigating the trade-offs inherent in collaborative perception.