- The paper introduces a novel Template-Aware Dynamic Convolution that encodes template features into dynamic kernels for efficient, real-time matching.
- It employs a dual-branch architecture with geometric refinement and self-supervised learning to improve in-plane pose estimation accuracy.
- Experimental results demonstrate superior speed and precision over traditional methods in multi-target and small-template scenarios.
An Efficient Deep Template Matching and In-Plane Pose Estimation Method via Template-Aware Dynamic Convolution
Introduction
This essay explores the methodologies and implementations discussed in the paper titled "An Efficient Deep Template Matching and In-Plane Pose Estimation Method via Template-Aware Dynamic Convolution." This paper presents a novel approach to template matching with a focus on improving efficiency and accuracy in estimating geometric transformations such as position, rotation, and scale. The core contribution is a lightweight framework that leverages Template-Aware Dynamic Convolution to achieve real-time performance, making it viable for industrial applications.
The task addressed involves the geometric alignment of a template image within a search image by estimating transformation parameters. This is achieved using a model represented by a parameterized function fψ that outputs the center coordinates, rotation angle, and scaling factors. The network architecture consists of a dual-branch design with a Template-Aware Dynamic Convolution Module (TDCM) and a lightweight refinement module to improve pose estimation.
The TDCM encodes template features into dynamic convolution kernels applied to search image features, facilitating efficient matching and modeling geometric transformations.
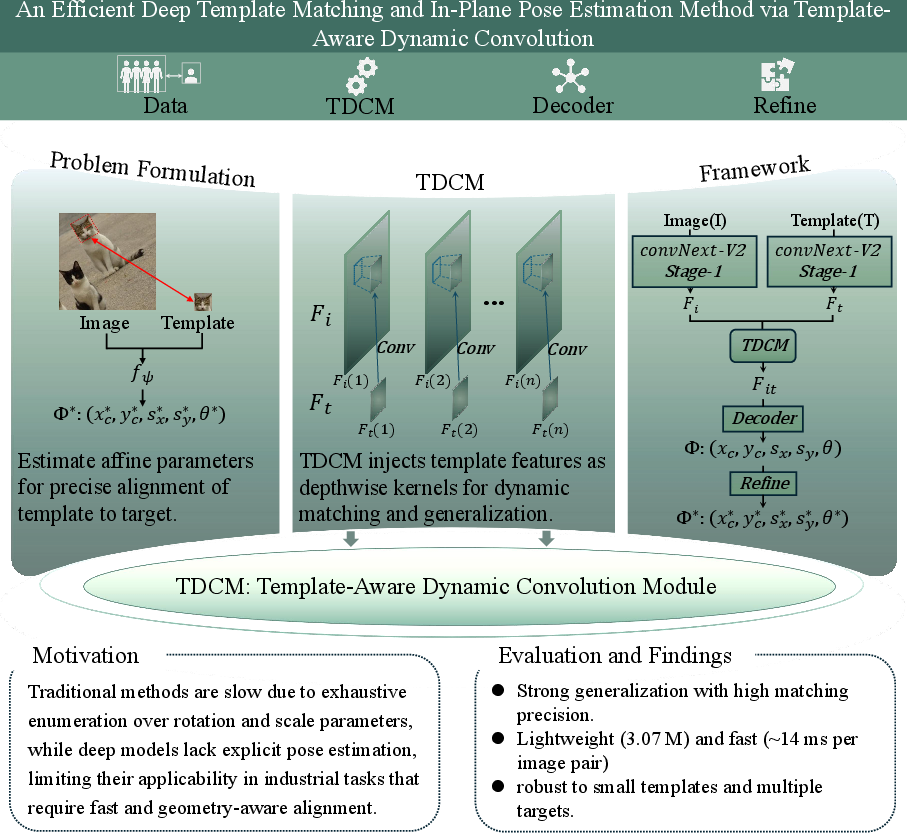
Figure 1: Overview of the proposed framework. Shallow features are extracted from template and search images; template features are encoded as dynamic kernels and applied to search features, then decoded into response and parameter maps, followed by lightweight refinement for accurate pose estimation.
Template-Aware Dynamic Convolution Module (TDCM)
The TDCM module is a key innovation in this work, using dynamic depthwise separable convolution to encode template features into convolutional kernels. It offers efficient incorporation of template-specific information during inference, promoting robust generalization to unseen templates. This design circumvents the need for exhaustive angle and scale enumeration by executing inference in a single pass.
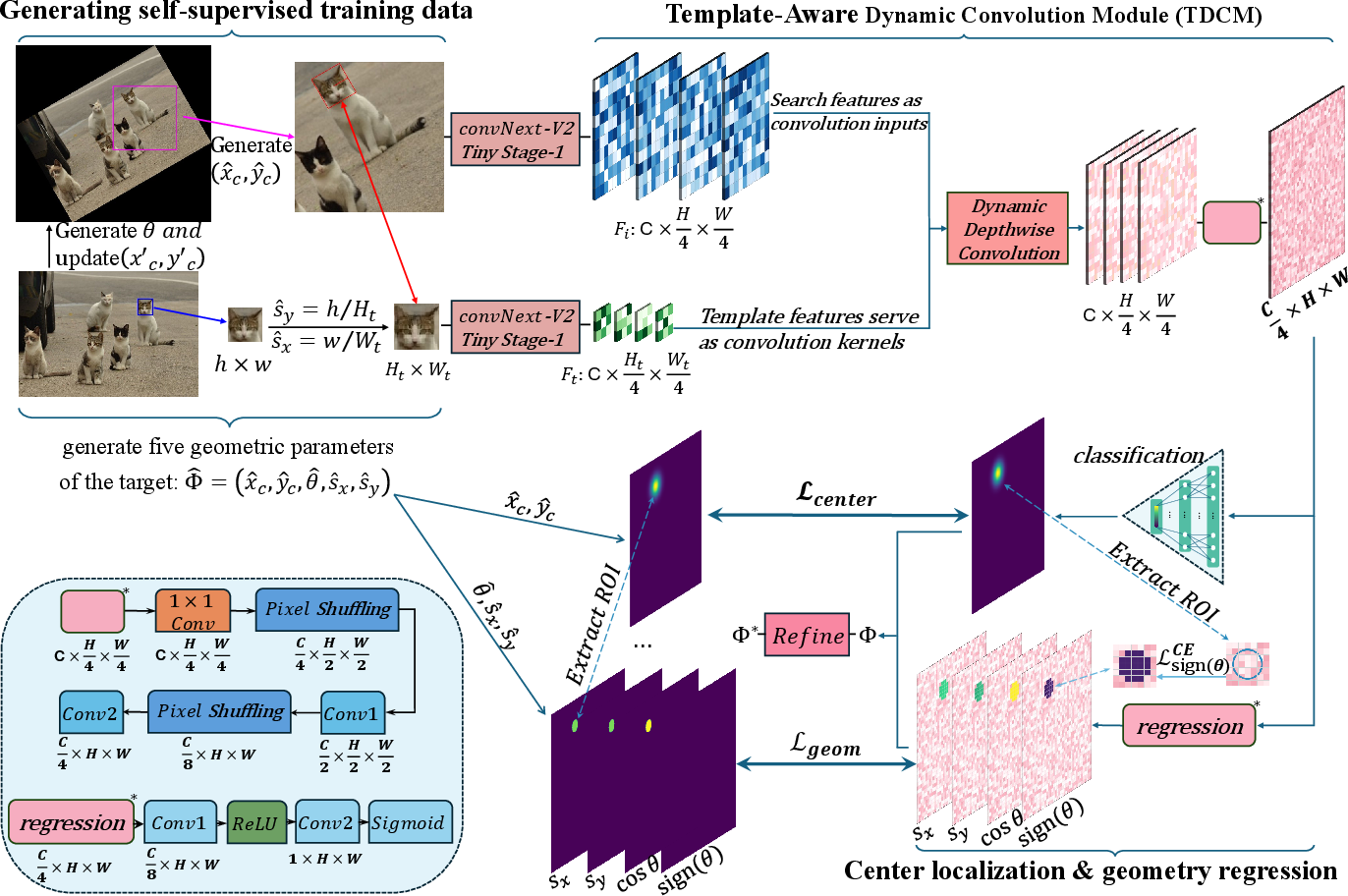
Figure 2: Architecture of the Template-Aware Dynamic Convolution Module (TDCM). The template features is encoded as a dynamic convolution kernel and applied to the shallow search features via depthwise separable convolution. This enables structure-aligned feature fusion and facilitates pose-aware representation learning.
Geometric Refinement and Self-Supervised Learning
A lightweight geometric refinement module is employed to locally correct the predictions of scale and rotation, aligning candidate transformations around initial estimates. This is supplemented by a self-supervised learning framework, generating training samples via rotation-shear transformations to enable annotation-free training.
Experiments and Results
The proposed method is validated through experiments comparing it with traditional and contemporary approaches like NCC, Fast-Match, and Halcon's Shape-Based Matching (SHM). The results illustrate superior inference speed and precision under various transformations, emphasizing robustness in multi-target and small-template scenarios.
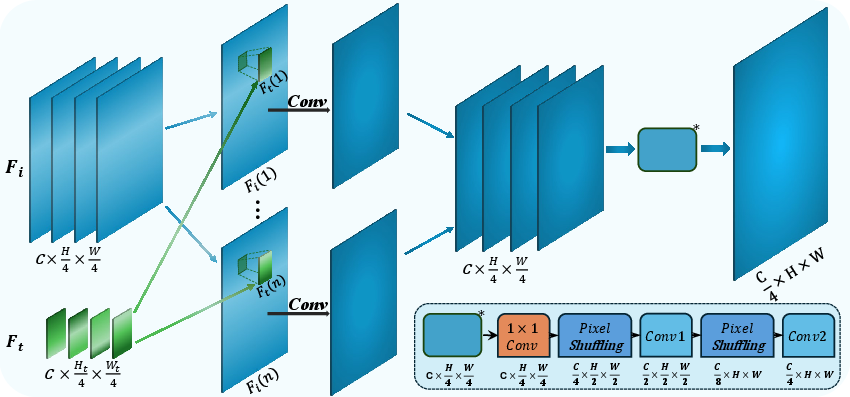
Figure 3: Performance comparison in multi-target matching scenarios. Our method achieves the highest precision and recall across all transformation levels and surpasses SHM in precision and mIoU under mild and moderate transformations (S1–S1.5). It also offers better inference efficiency in compound transformation scenarios.
Sensitivity and Ablation Studies
Comprehensive ablation studies reveal the significance of components like TDCM and the refinement module. Sensitivity analyses outline the impact of hyperparameters on performance, suggesting optimal configurations for balance between speed and accuracy.

Figure 4: Sensitivity analysis of the geometric refinement module hyperparameters. (a) Impact of step size on error improvement and runtime. (b) Impact of search range on error improvement and runtime.
Conclusion
The paper's approach provides a substantial advancement in template matching via a novel dynamic convolution method, coupled with lightweight architecture and self-supervised training. The practicality of this framework is affirmed by its competitive performance and applicability to real-time industrial environments. Future research may explore scaling mechanisms and enhanced robustness to diverse non-rigid transformations. The proposed method stands as a promising solution for precise and efficient template matching in automated systems.