- The paper introduces Husky v.2, a quadrupedal robot that achieves a four-fold thrust-to-weight improvement by repurposing its leg structures for aerial flight.
- The methodology leverages advanced mechanical design with a four-bar knee linkage and robust control strategies for dynamic trotting and stable hovering.
- Experimental validation demonstrates effective push recovery, dynamic morphing, and precise center-of-mass tracking, underscoring its multi-modal capabilities.
Dynamic Quadrupedal Legged and Aerial Locomotion via Structure Repurposing
Introduction and Motivation
This paper presents Husky v.2, a multi-modal quadrupedal robot capable of both dynamic legged locomotion and aerial flight through a novel approach termed "structure repurposing." The work addresses the persistent challenge in multi-modal robotics: reconciling the conflicting design requirements of terrestrial and aerial mobility. Traditional designs often suffer from increased mass and complexity when integrating flight capabilities into legged robots, which can degrade ground locomotion performance. The Husky v.2 circumvents this by reusing leg structures as part of the aerial propulsion system, thereby optimizing mass distribution and functional utility across both modes.
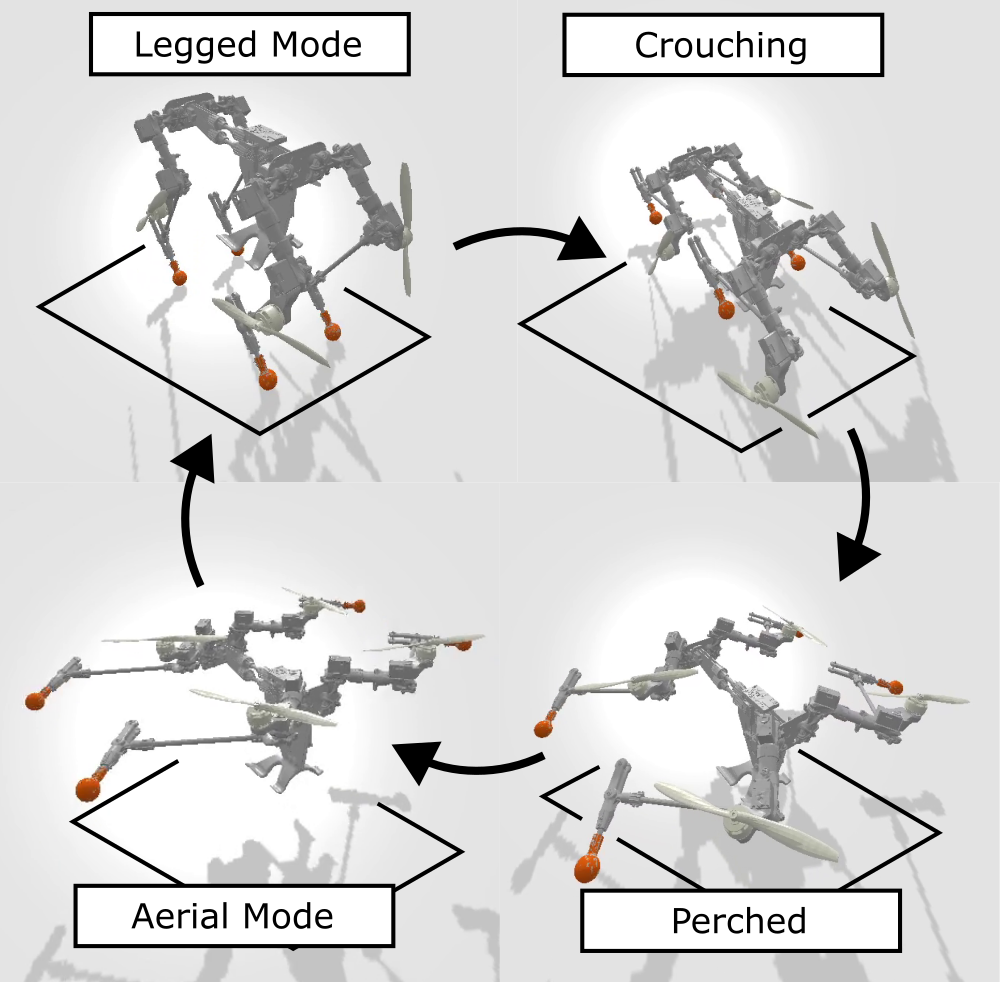
Figure 1: This work explores multi-modal dynamic-legged-aerial locomotion through appendage repurposing.
Mechanical and Electromechanical Design
Structure Repurposing Rationale
The design rationale is grounded in minimizing the modal conflict between legged and aerial requirements. The robot's legs, which constitute a significant portion of the system mass, are repurposed as structural elements for flight, specifically by mounting propellers at the knee joints. This approach avoids the mass penalty typically incurred by adding dedicated aerial components, as the same appendages serve dual functions. The theoretical analysis in the paper quantifies the trade-off between leg loading and thrust-to-weight ratio, demonstrating that structure repurposing enables a four-fold improvement in thrust-to-weight without additional mass.
Hardware Architecture
Husky v.2 employs a lightweight body constructed from carbon fiber and 3D-printed Onyx-reinforced plastic, prioritizing payload reduction over leg stiffness. Each leg features three actuated DoFs: hip frontal and sagittal flexion/extension, and knee flexion/extension. The knee actuator drives a four-bar linkage, facilitating both terrestrial and aerial morphing. The electronics architecture is modular, with a front-heavy design to optimize the center of mass for both walking and flight. Power distribution is managed via DC-DC converters, and control is split between a Jetson Orin Nano onboard computer and a Cube Orange+ flight controller.
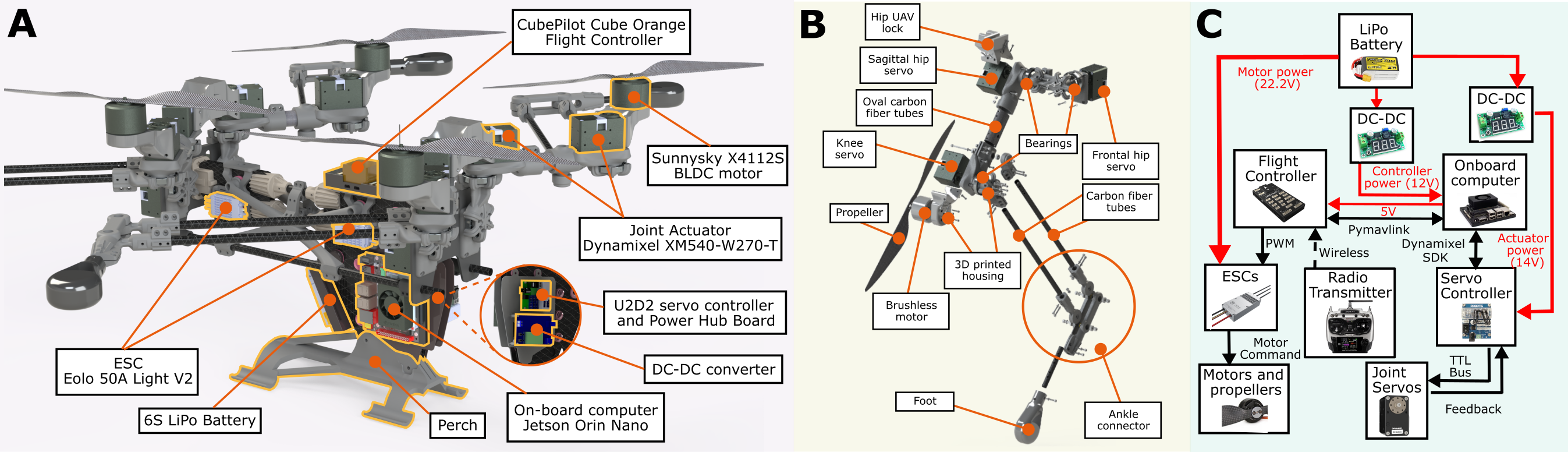
Figure 2: System overview, leg design, and electronics architecture of Husky v.2.
Experimental Validation
Dynamic Trotting and Push Recovery
The robot demonstrates untethered dynamic trotting using a Raibert-style controller, with swing trajectories generated via fourth-order Bézier curves. Joint positions are computed using Pinocchio, based on desired end-effector positions. Husky v.2 exhibits robust push recovery, maintaining stability after external perturbations through adaptive foot placement.
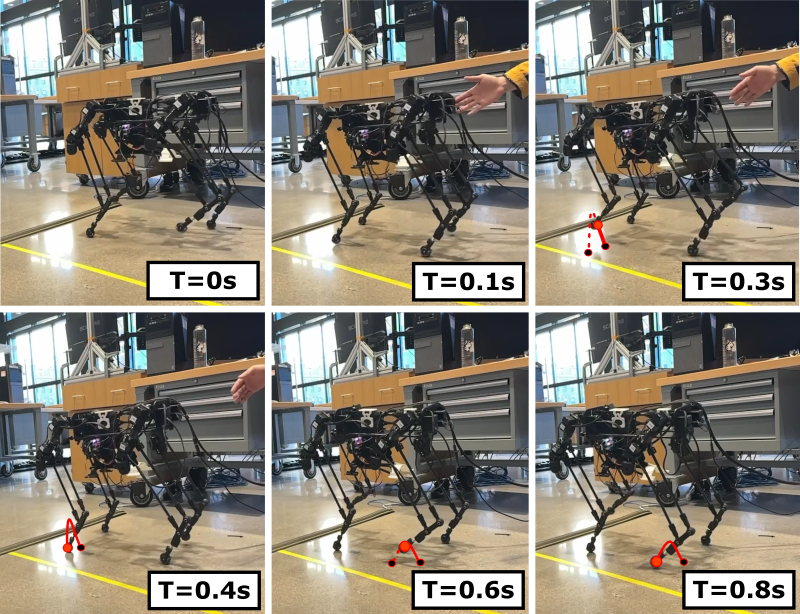
Figure 3: Husky v.2 recovers from a gentle push during untethered trotting; leg trajectories are shown in red.
Morphing and Hovering
The transition from legged to aerial mode is achieved by collapsing and splaying the legs, aligning the propellers for optimal lift. The morphing process is completed in approximately 10 seconds, after which the robot adopts a standard quadcopter control scheme. Hovering is stable across roll, pitch, and yaw, as evidenced by flight data showing consistent orientation and motor output during takeoff, flight, and landing.
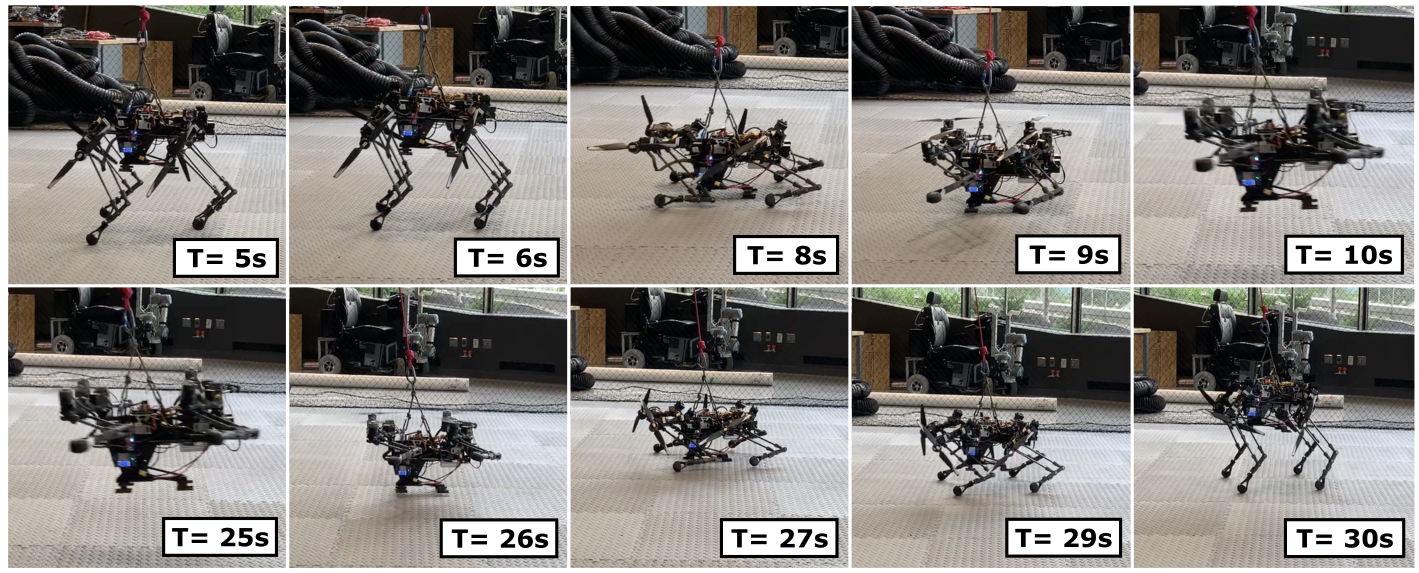
Figure 4: Husky v.2's structure repurposing during transitions between dynamic trotting and hovering.
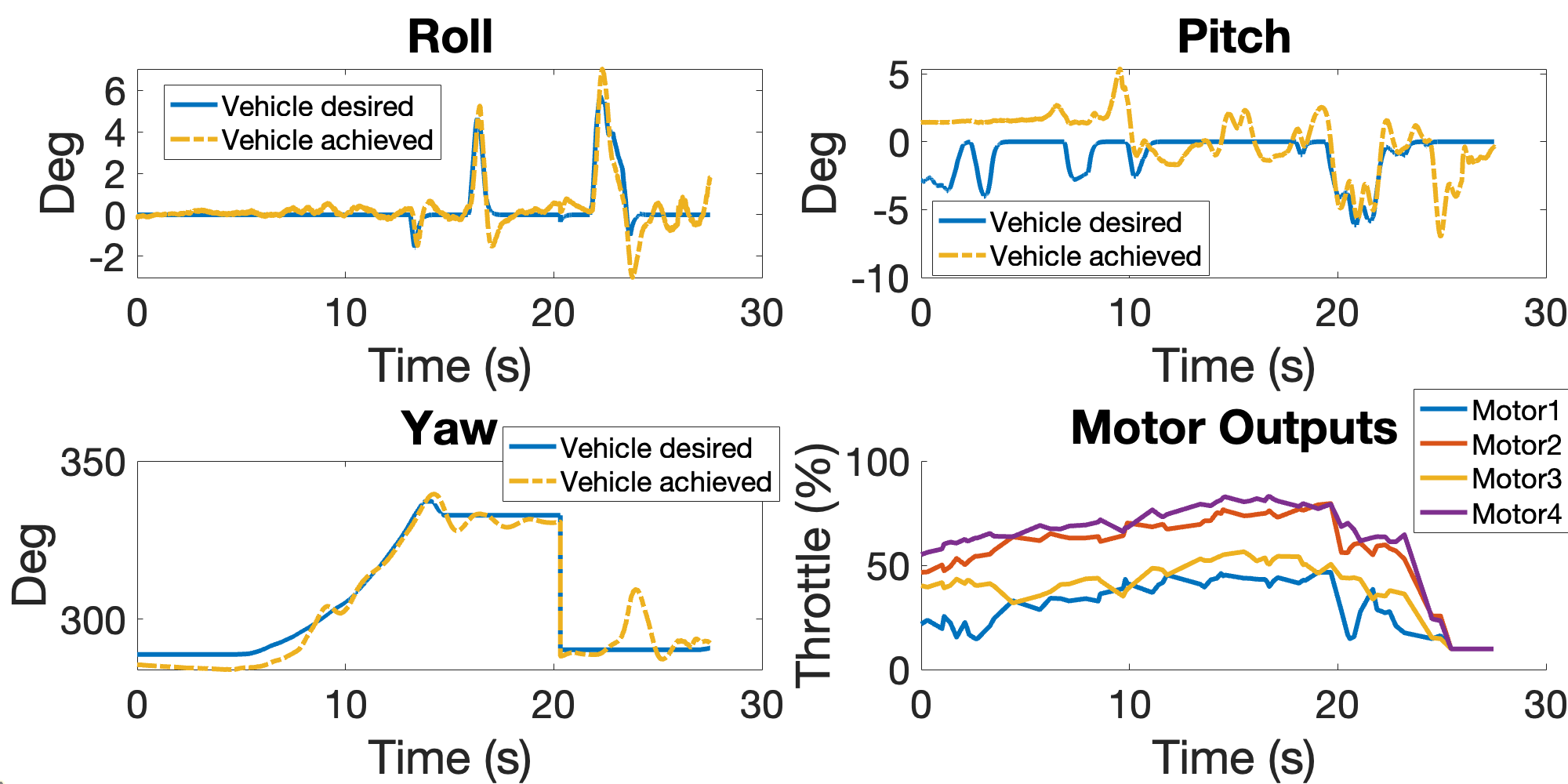
Figure 5: Vehicle orientation and motor output during transition to aerial mode; takeoff at 10s, landing at 25s.
Thrust-Vectoring and Posture Manipulation
During ground locomotion, the thrusters can be activated for roll stabilization, enabling dynamic posture manipulation and thrust-vectoring. This capability is critical for tasks requiring enhanced stability or maneuverability, such as narrow path walking or slacklining.
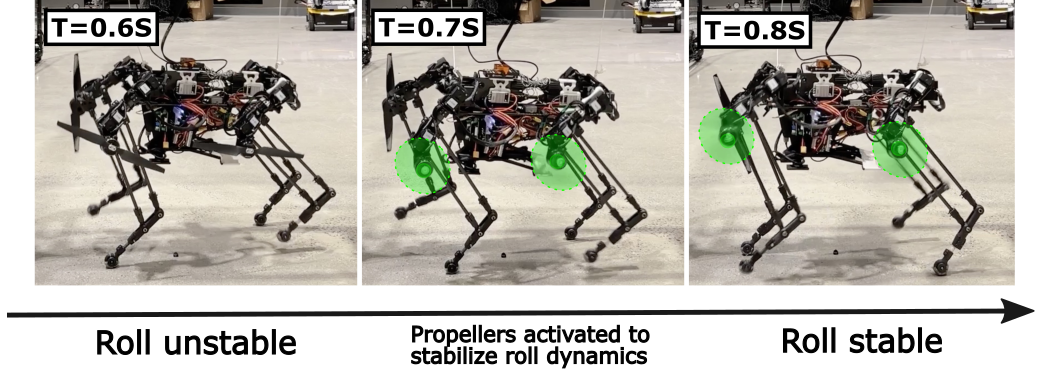
Figure 6: Husky v.2 during untethered trotting with active thrusters for roll stabilization.
The robot achieves precise tracking of desired body CoM velocity during dynamic trotting, with minimal deviation between commanded and actual leg endpoints. Close-up analysis of stance and swing phases confirms the efficacy of the control strategy.
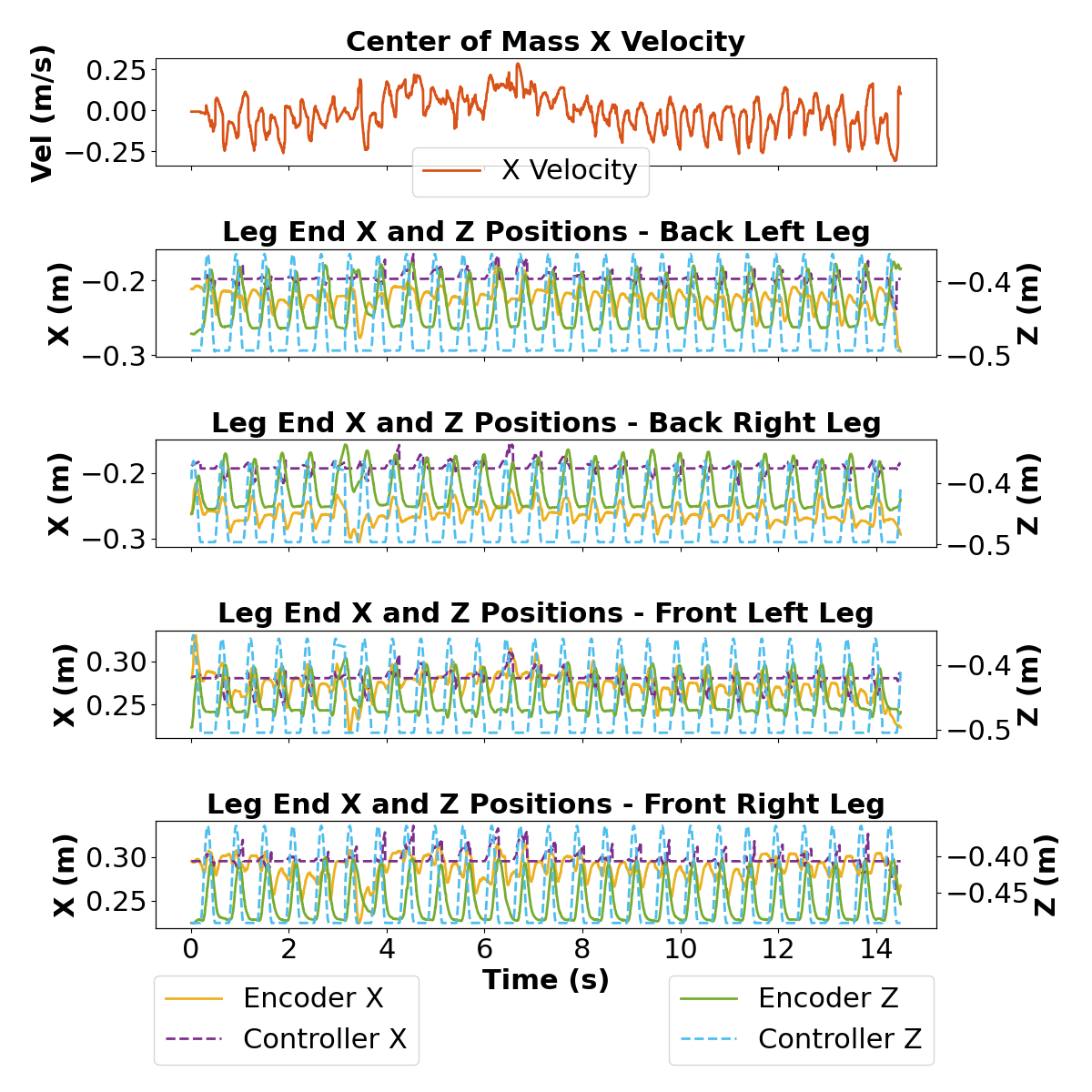
Figure 7: Body CoM x-axis velocity, desired, and actual leg ends during dynamic trotting.
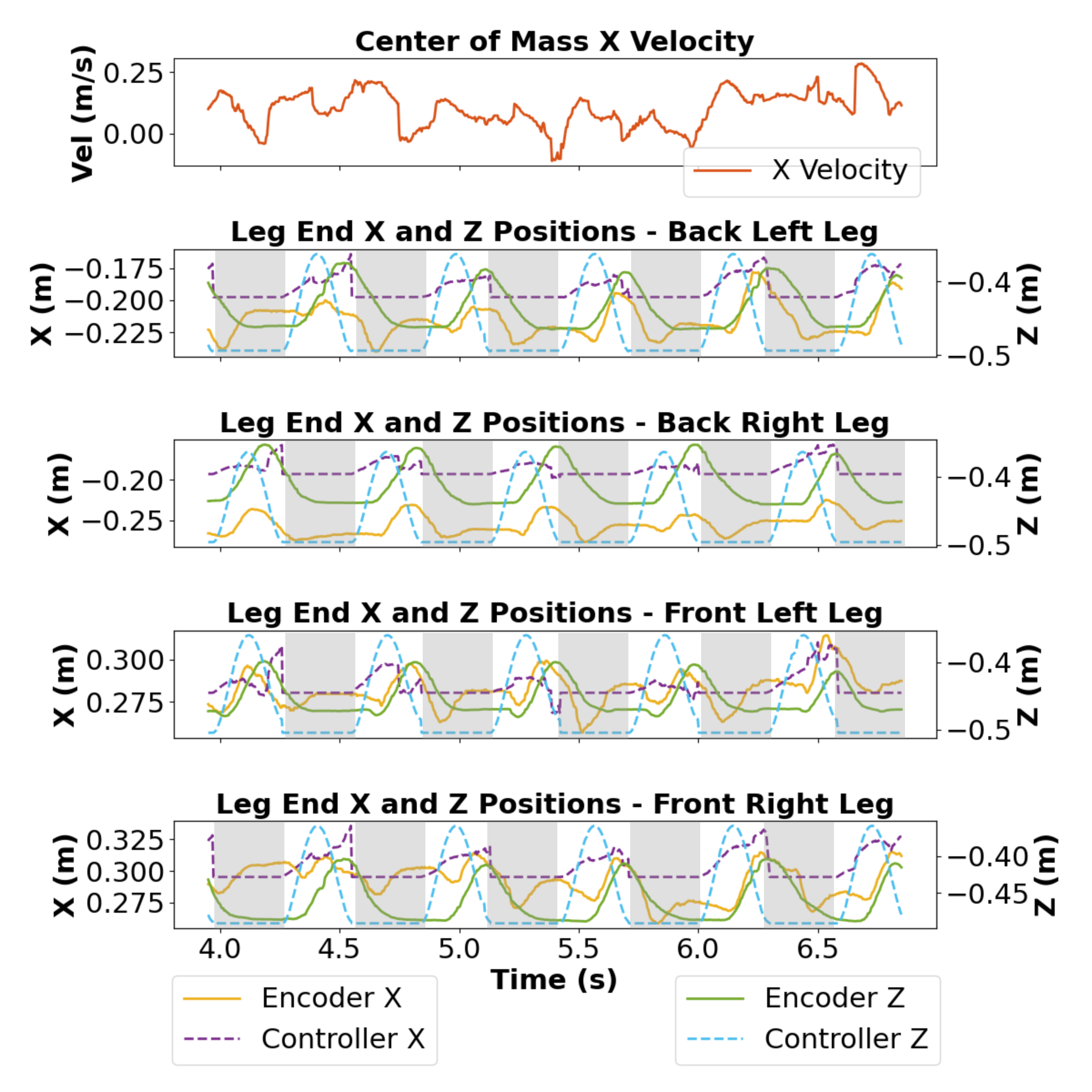
Figure 8: Closeup of body CoM x-axis velocity and leg ends; stance phases indicated by shaded regions.
Implications and Future Directions
The Husky v.2 validates the concept of structure repurposing for multi-modal locomotion, achieving both dynamic quadrupedal walking and stable hovering without the mass penalty of redundant hardware. The design supports thrust-to-weight and leg loading ratios conducive to both modalities. However, the paper notes that further work is required to assess payload capacity for additional sensors and autonomous navigation systems.
Future research will focus on:
- Unified control strategies integrating thruster and ground reaction forces for advanced locomotion tasks.
- Exploiting multimodality for complex environment negotiation, including obstacle traversal and fault recovery in flight.
- Enhancing posture manipulation capabilities for specialized tasks such as slacklining and steep slope locomotion.
Conclusion
This work demonstrates a practical solution to the modal conflict in multi-modal robotics through hardware structure repurposing. Husky v.2 achieves efficient dynamic legged and aerial locomotion, validated by experimental results in trotting, push recovery, morphing, and hovering. The approach offers a promising direction for future multi-modal robotic platforms, with potential applications in autonomous delivery, search and rescue, and exploration in unstructured environments.