- The paper introduces the Hockens-A Hand, an underactuated mechanism using Hoeckens linkages and silicone phalanges to achieve multifunctional adaptive grasping.
- It details a novel integration of double-parallelogram and four-bar linkages that enable three distinct grasp modes with minimal actuation and high precision.
- Experimental validation demonstrates stable grasping with success rates over 88% and effective range adaptability for varied object sizes.
Adaptive Grasping with the Hockens-A Hand: Mechanism Design, Kinematic Analysis, and Experimental Validation
Introduction
This paper introduces the Hockens-A Hand, an underactuated robotic hand that leverages a composite mechanism integrating Hoeckens linkages, double-parallelogram structures, and a specialized four-bar linkage. The design enables three distinct grasping modes—parallel pinching, asymmetric scooping, and enveloping—using a single linear actuator. The system exploits passive mechanical intelligence for compliance and adaptability in unstructured environments, with mesh-textured silicone phalanges further enhancing the hand’s ability to envelop objects of varying shapes and sizes. The work is situated within the context of underactuated hands, addressing limitations of traditional parallel grippers and advancing the state-of-the-art in adaptive manipulation.
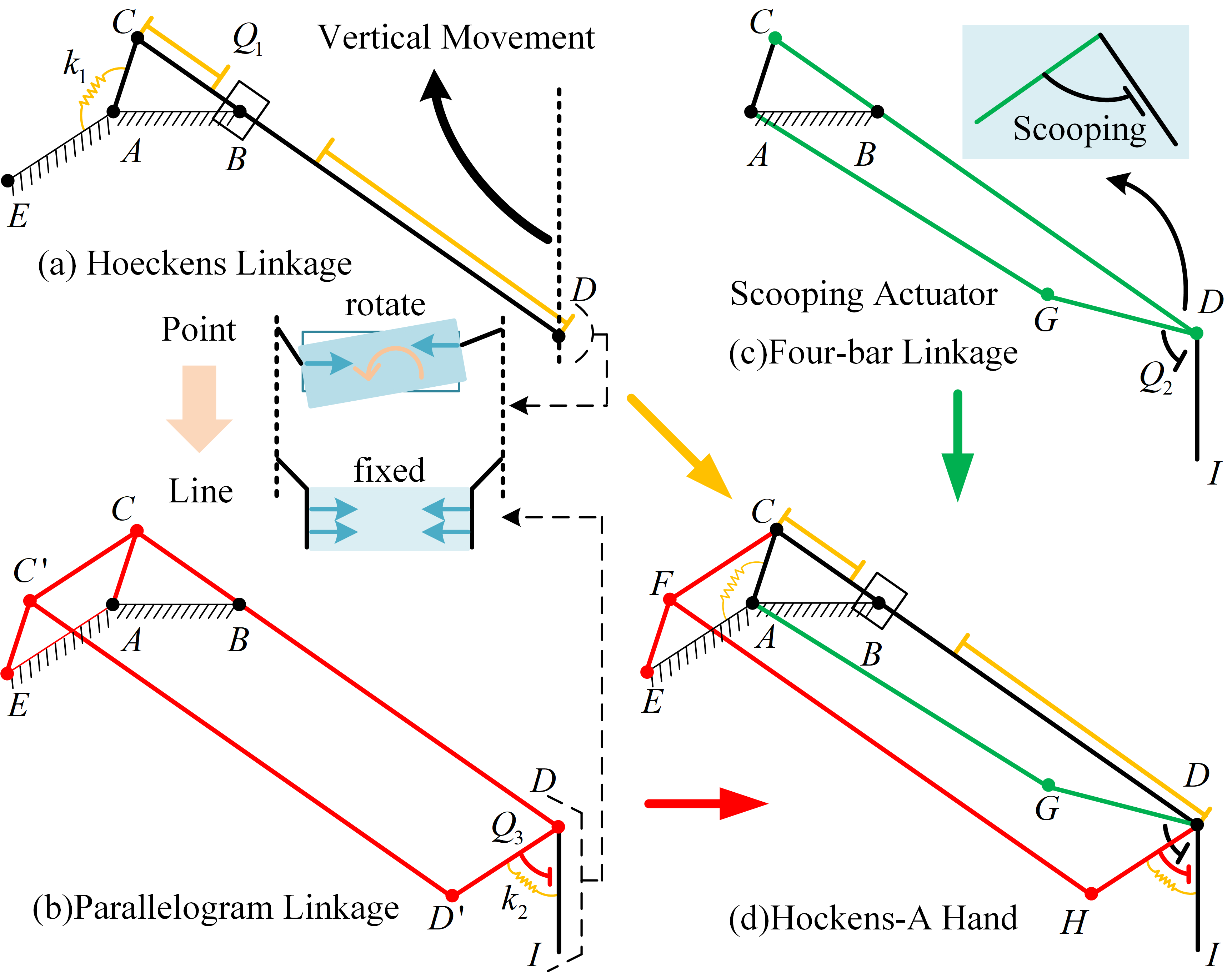
Figure 1: Mechanism evolution from basic Hoeckens linkage to the final composite system enabling multifunctional grasping.
Mechanism Design and Kinematic Modeling
Hoeckens Linkage for Vertical Compliance
The core of the Hockens-A Hand is the offset Hoeckens linkage, which generates near-linear vertical motion at the fingertip. The kinematic closure equations establish a one-to-one mapping between the input crank angle and the displacement of the output point, ensuring precise vertical compliance. Simulation results indicate a maximum deviation of 0.0164 units in the vertical trajectory, which is sufficient for precision grasping tasks.
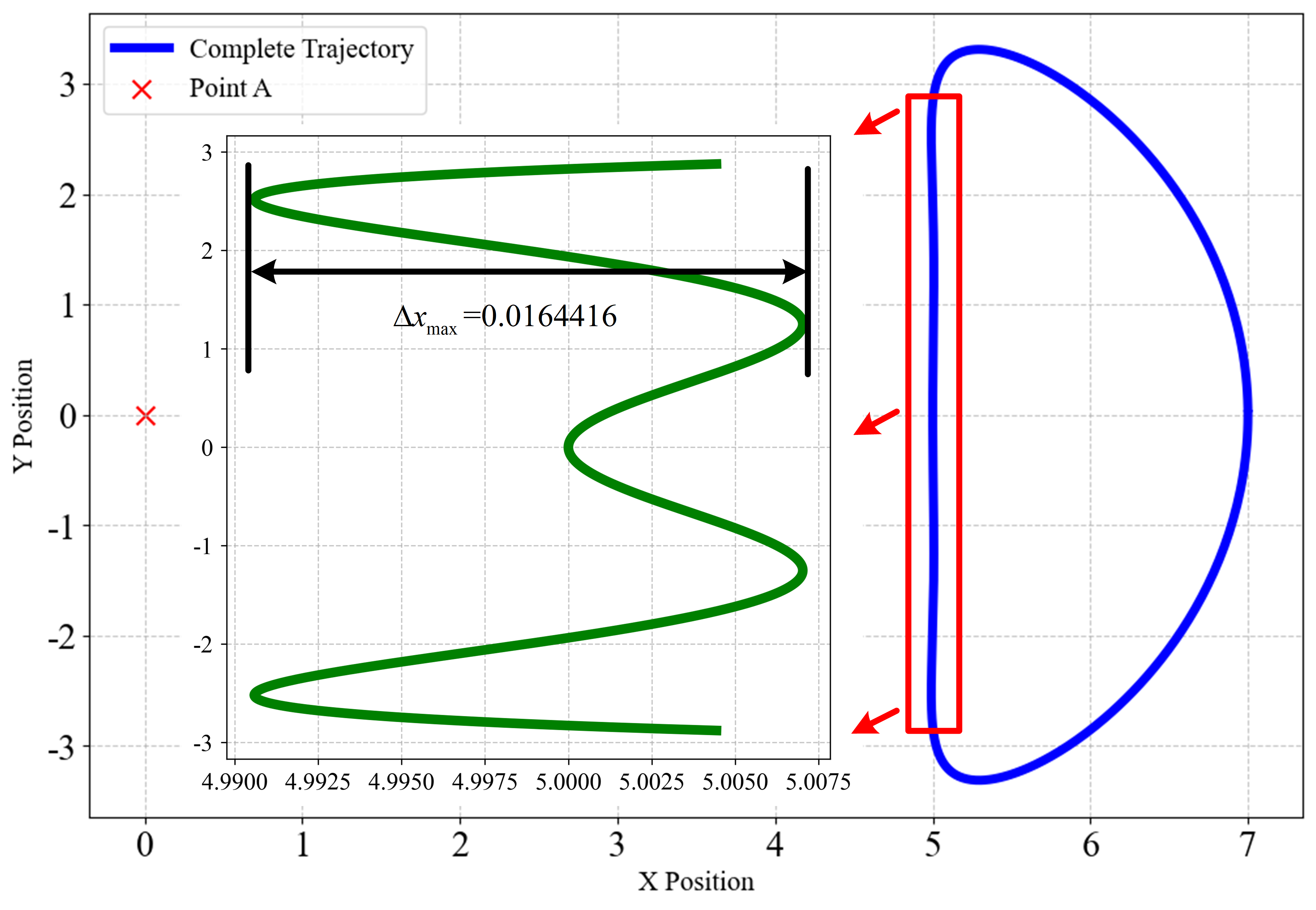
Figure 2: Displacement characteristics of point D during linkage operation, demonstrating near-linear vertical motion.
Double-Parallelogram and Four-Bar Integration
To overcome the limitations of tip-point contact in traditional Hoeckens mechanisms, the design incorporates a double-parallelogram system, ensuring line-contact and stable parallel pinching. The four-bar linkage is integrated to enable passive transitions between pinching and scooping postures, controlled by mechanical stoppers and springs. The system achieves two-stage motion: initial vertical translation followed by outward rotation of the distal phalange, triggered by environmental constraints or object geometry.
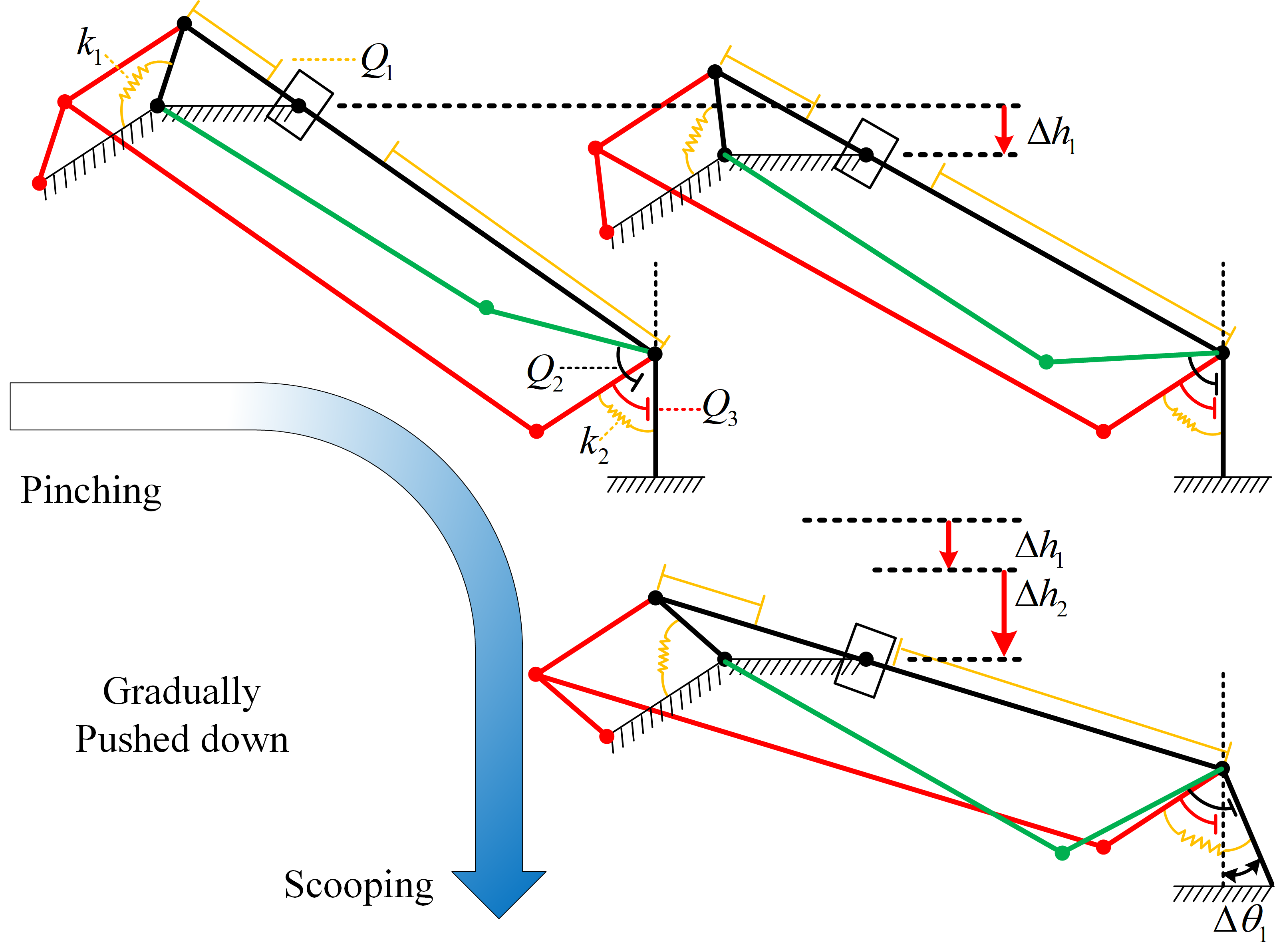
Figure 3: Posture transition sequence from pinching to scooping, illustrating the two-stage adaptive motion.
3D Embodiment and Soft Phalange Integration
The hand is realized as a 3D-printed prototype with two symmetrical fingers. The distal phalange is constructed from a mesh-textured silicone membrane, providing elastic deformation for adaptive enveloping. The mechanical details include stoppers and torsion springs for reset and stage separation, ensuring reliable operation under varying environmental constraints.
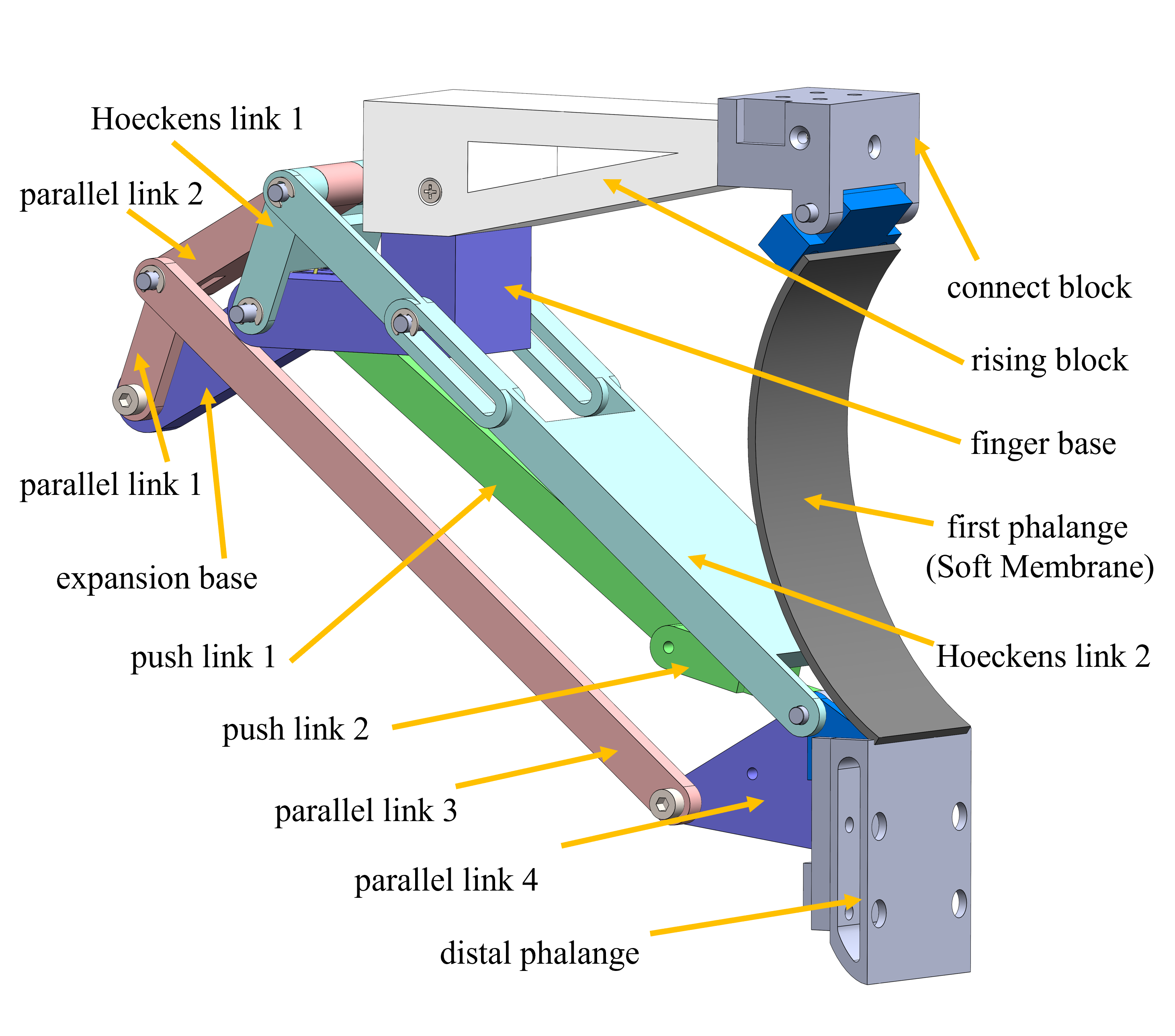
Figure 4: Configuration of the Hockens-A Hand, showing the integration of linkages and soft phalanges.
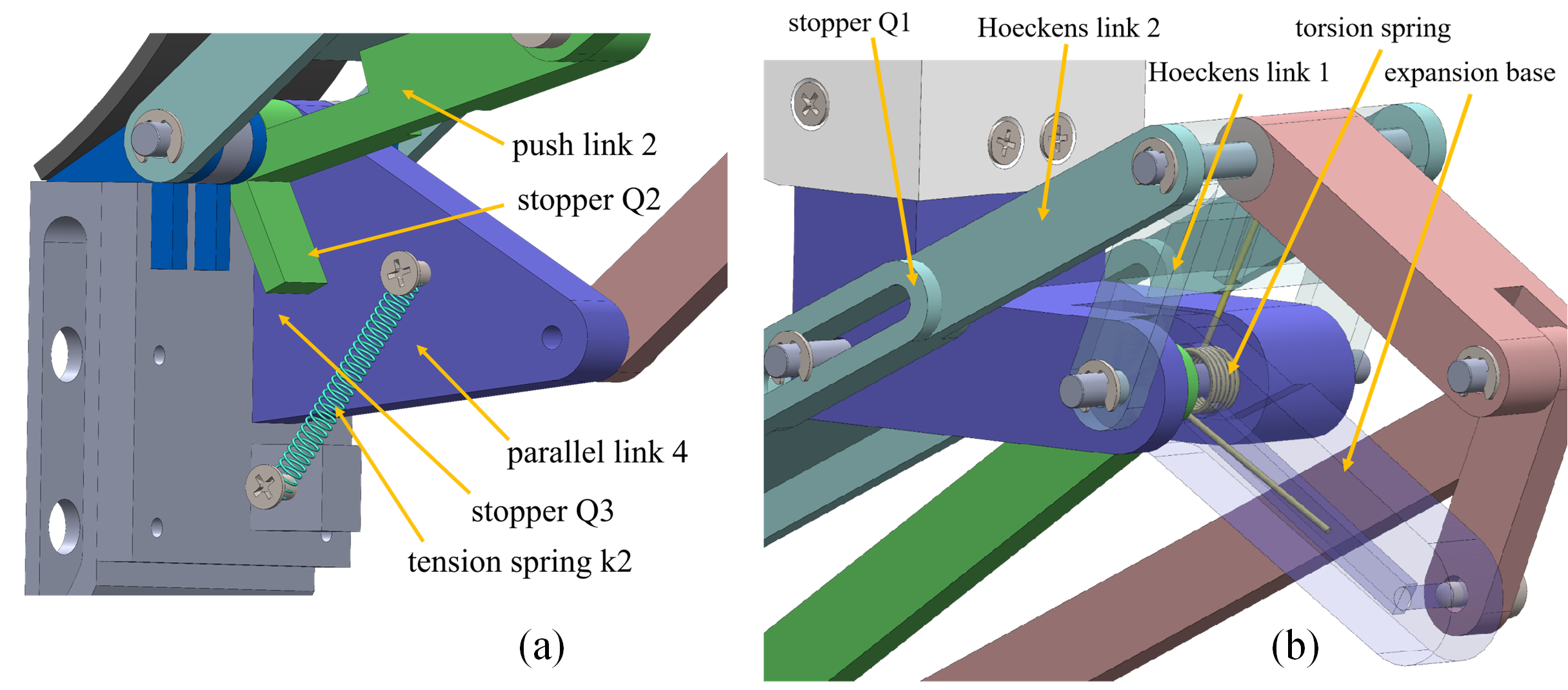
Figure 5: Mechanical details of stoppers and spring installations for motion control and reset.
Kinematic and Parametric Analysis
Four-Bar Linkage Optimization
Parametric kinematic modeling of the four-bar linkage reveals nonlinear relationships between link dimensions and angular variation amplitudes. The Grashof criterion and workspace constraints are used to delimit feasible design regions. Full parametric scanning identifies optimal link lengths (LAG=125 mm, LDG=50 mm) yielding an angular variation of 59.82∘±0.5∘ with less than 1% experimental error. Sensitivity analysis shows strong positive correlation for AG length and high negative sensitivity for DG length, enabling coarse and fine adjustment of the grasping range.
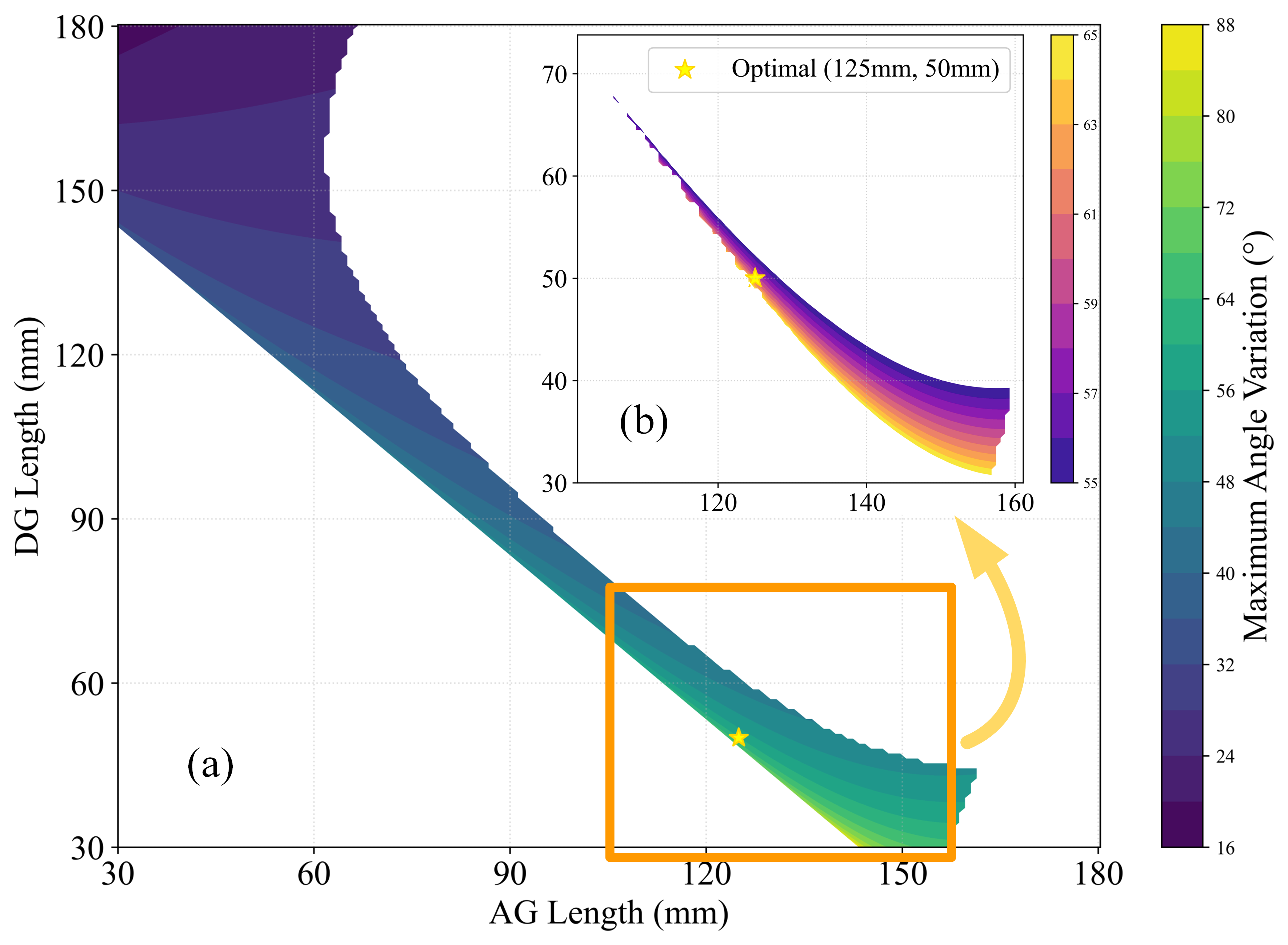
Figure 6: Four-bar parameter optimization contours, highlighting global sensitivity and local design windows.
Fingertip Trajectory and Workspace
Simulation of the fingertip trajectory demonstrates two-stage motion: initial vertical translation followed by horizontal extension. The working area, calculated via the Shoelace Formula, is 153.95 mm², indicating efficient coverage with compact motion.
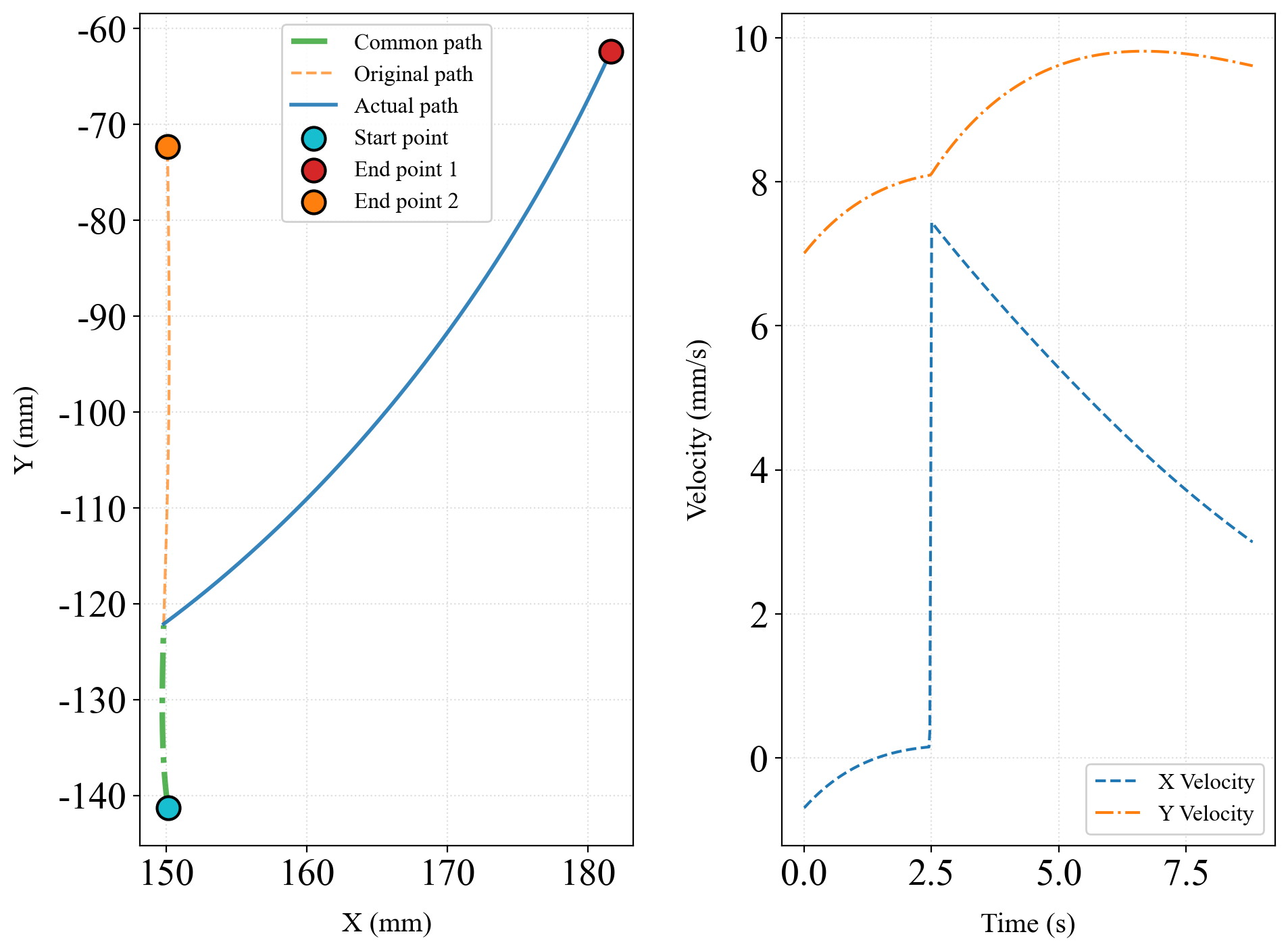
Figure 7: Fingertip trajectory and velocity components, showing distinct motion stages and efficient workspace utilization.
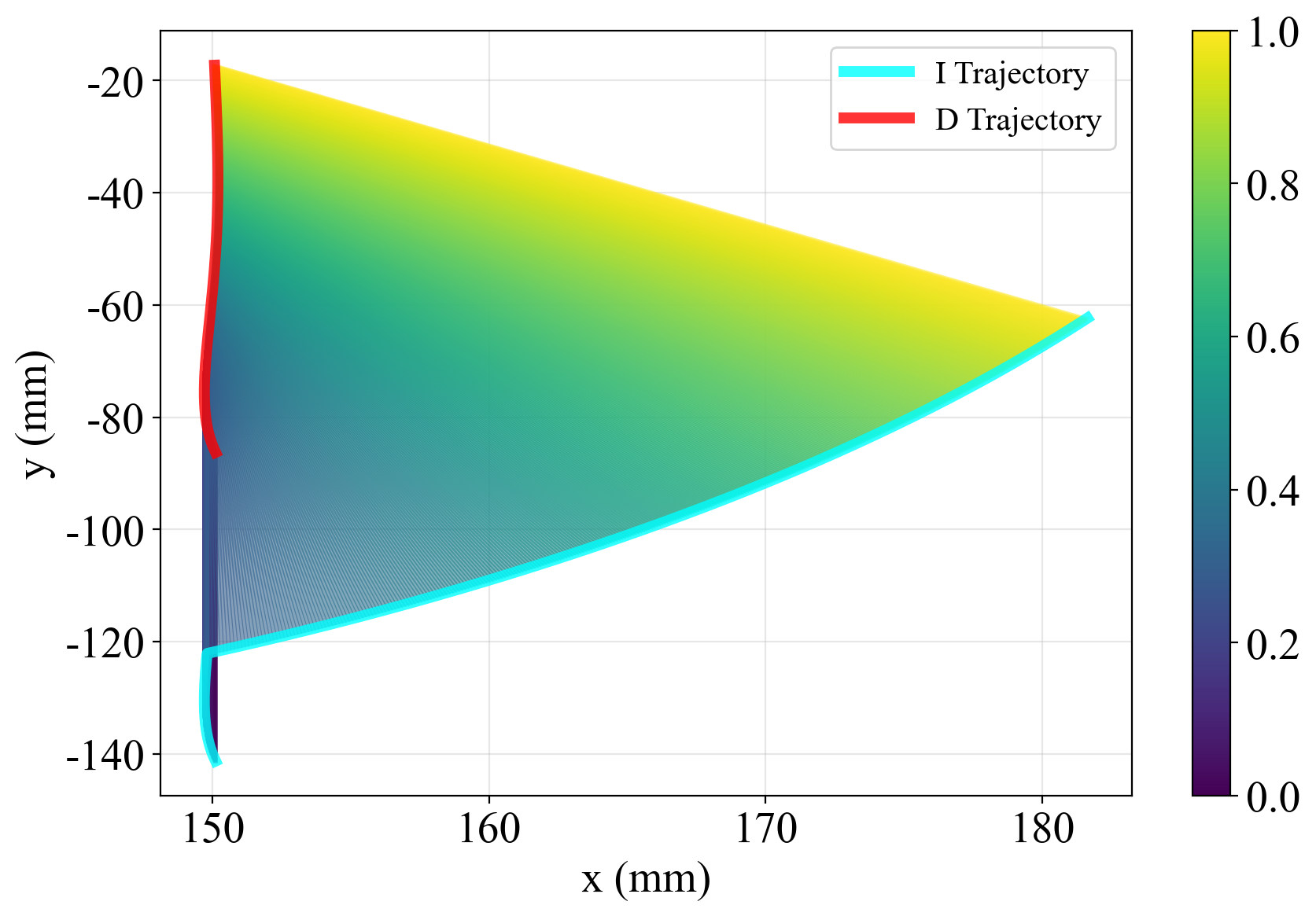
Figure 8: Complete motion trajectory of the distal phalange, quantifying the adaptive range.
Grasping Force Analysis
The grasping force FN is analyzed using power equations, incorporating spring constants, displacement, and angular velocities derived from the kinematic model. The results show that FN is positively correlated with pressing power and varies with the position and rotation angle. Notably, the force is higher at larger input angles, and pressure decreases toward the fingertip, which has implications for grasp stability and object retention.
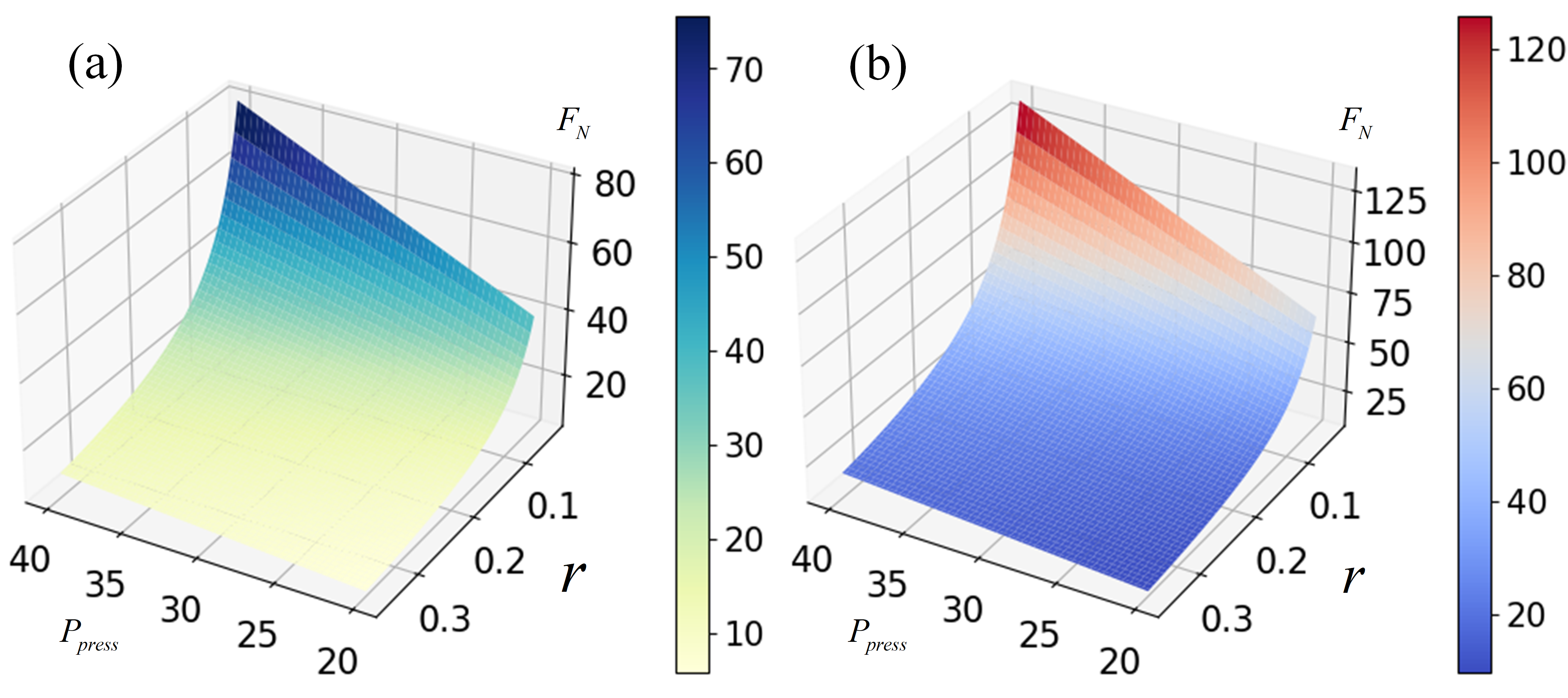
Figure 9: Analysis of FN under variations of pressing power, distance, and rotation angle, demonstrating parametric effects on grasping force.
Experimental Validation
A 3D-printed prototype was fabricated and tested across a range of grasping scenarios. The hand achieves a linear grasping range of 0–122 mm and a vertical lifting height of 87 mm. Three grasping modes were validated:
The enveloping ability of the silicone phalange was tested on objects with diameters from 60 mm to 100 mm, achieving optimal performance within this range. Stability decreases slightly outside these bounds, but the system retains some adaptability.
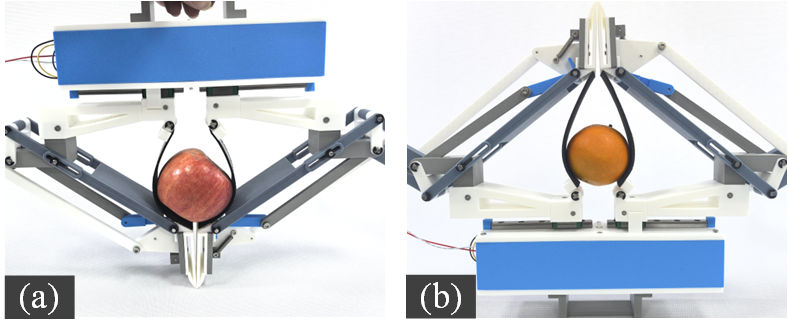
Figure 11: Experiments of the enveloping ability of soft silicone, confirming adaptive grasping across object sizes.
Implications and Future Directions
The Hockens-A Hand demonstrates that passive mechanical intelligence, when combined with soft materials and optimized linkages, can achieve multifunctional adaptive grasping with minimal actuation. The design reduces system complexity and cost, while maintaining robust performance in unstructured environments. Theoretical contributions include the parametric sensitivity analysis and kinematic modeling, which inform future mechanism optimization.
Practically, the hand is suitable for service robotics, industrial automation, and assistive devices where environmental constraints and object diversity are prevalent. Future work may explore integration with tactile sensing, further miniaturization, and extension to multi-fingered hands with distributed compliance. The approach also invites investigation into learning-based control strategies that exploit the passive adaptability of the mechanism.
Conclusion
The Hockens-A Hand advances underactuated robotic grasping by integrating Hoeckens linkages, double-parallelogram structures, and four-bar amplification with soft phalanges. The system achieves three adaptive grasping modes using a single actuator, validated through kinematic analysis and experimental trials. The design offers a compact, cost-effective solution for versatile manipulation, with implications for both theoretical mechanism design and practical deployment in real-world environments.
