- The paper establishes a framework that embeds physical computing—both analog and algorithmic—into soft robotic systems to achieve programmable control and perception.
- It details three strategies: analog oscillators, physical reservoir computing, and algorithmic logic, each enabling distinct robotic behaviors.
- The work highlights future directions in physical memory, miniaturized circuits, and hybridized systems to enhance soft robot autonomy.
Embodying Physical Computing into Soft Robots: Frameworks, Mechanisms, and Future Directions
Introduction and Scope
This paper establishes a formal framework for integrating physical computing—both analog and algorithmic—into soft robotic systems. The central thesis is that by embedding computation directly into the mechanical body of soft robots, it is possible to achieve robust, programmable, and electronics-minimal control and perception. The work delineates the necessary criteria for a system to qualify as a physical computer: explicit input encoding, output decoding, and a programmable input-output evolution within a physical kernel. The paper systematically reviews three principal strategies for embodied physical computing in soft robots: analog oscillators, physical reservoir computing (PRC), and algorithmic physical computing, and discusses their implications for the future of soft robotics and mechanical intelligence.
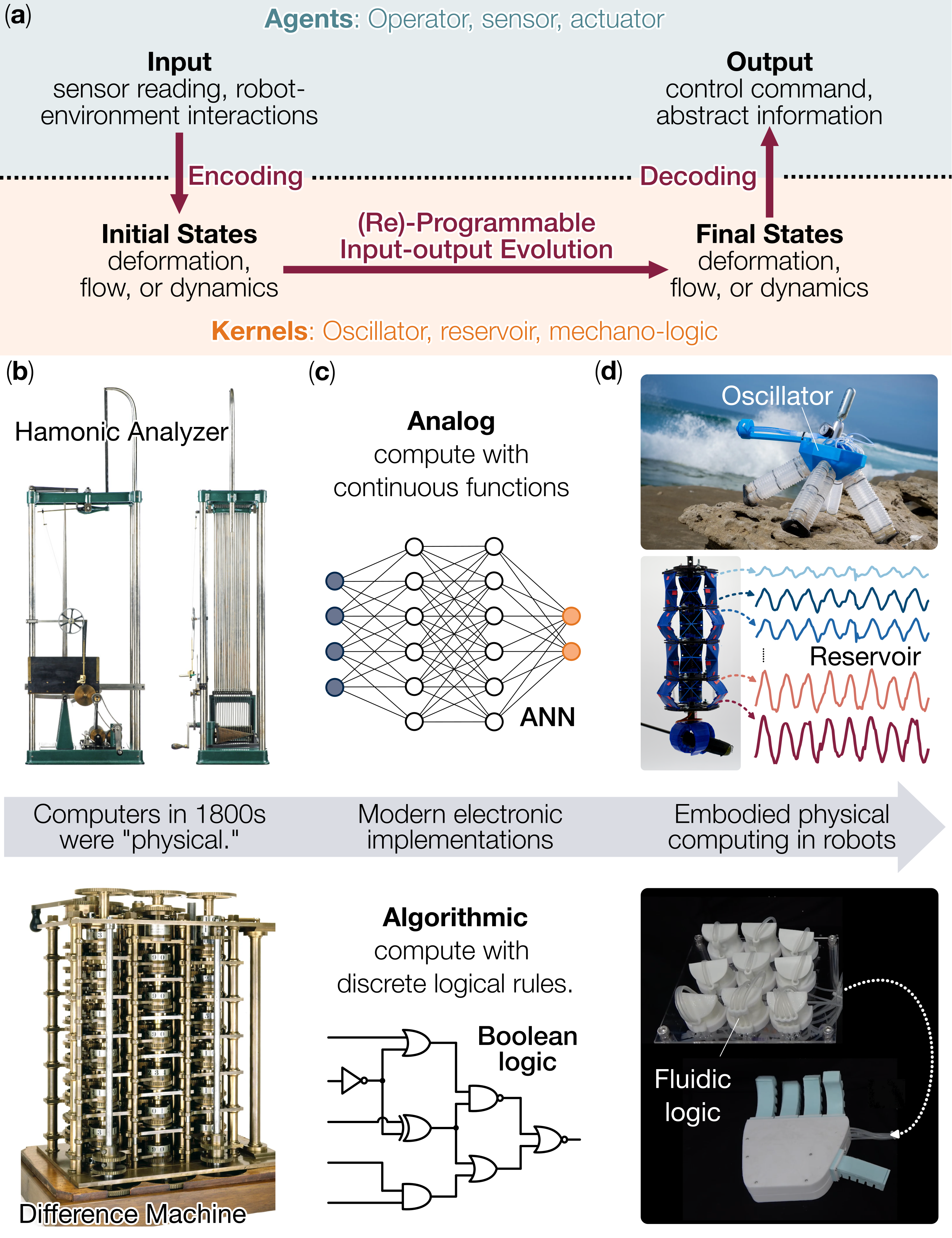
Figure 1: The architecture and categorization of physical computing, distinguishing analog and algorithmic paradigms and their historical and modern embodiments in soft robots.
Defining Physical Computing in Soft Robotics
The authors clarify that not all responsive or adaptive behaviors in soft robots constitute computation. Only systems with explicit mechanisms for input encoding, output decoding, and programmable evolution are considered physical computers. This distinction excludes morphological computation and mechano-intelligence that lack programmability or explicit information processing pathways. The paper adopts a taxonomy inspired by Jaeger et al., categorizing physical computers as either analog (continuous signals, physics-based evolution) or algorithmic (discrete signals, logic-based evolution).
Analog Oscillators and Rhythmic Motion
Analog oscillators in soft robots are inspired by biological central pattern generators (CPGs), which generate rhythmic outputs from simple, non-rhythmic inputs. The paper details implementations such as electronics-free pneumatic ring oscillators that drive coordinated leg motions in quadrupeds, and SMA- or LCE-based mechanisms that exploit mechanical instabilities for self-sustained oscillation and locomotion. These systems demonstrate that rhythmic, programmable motion can be achieved without digital controllers, relying instead on the intrinsic dynamics of soft materials and structures.
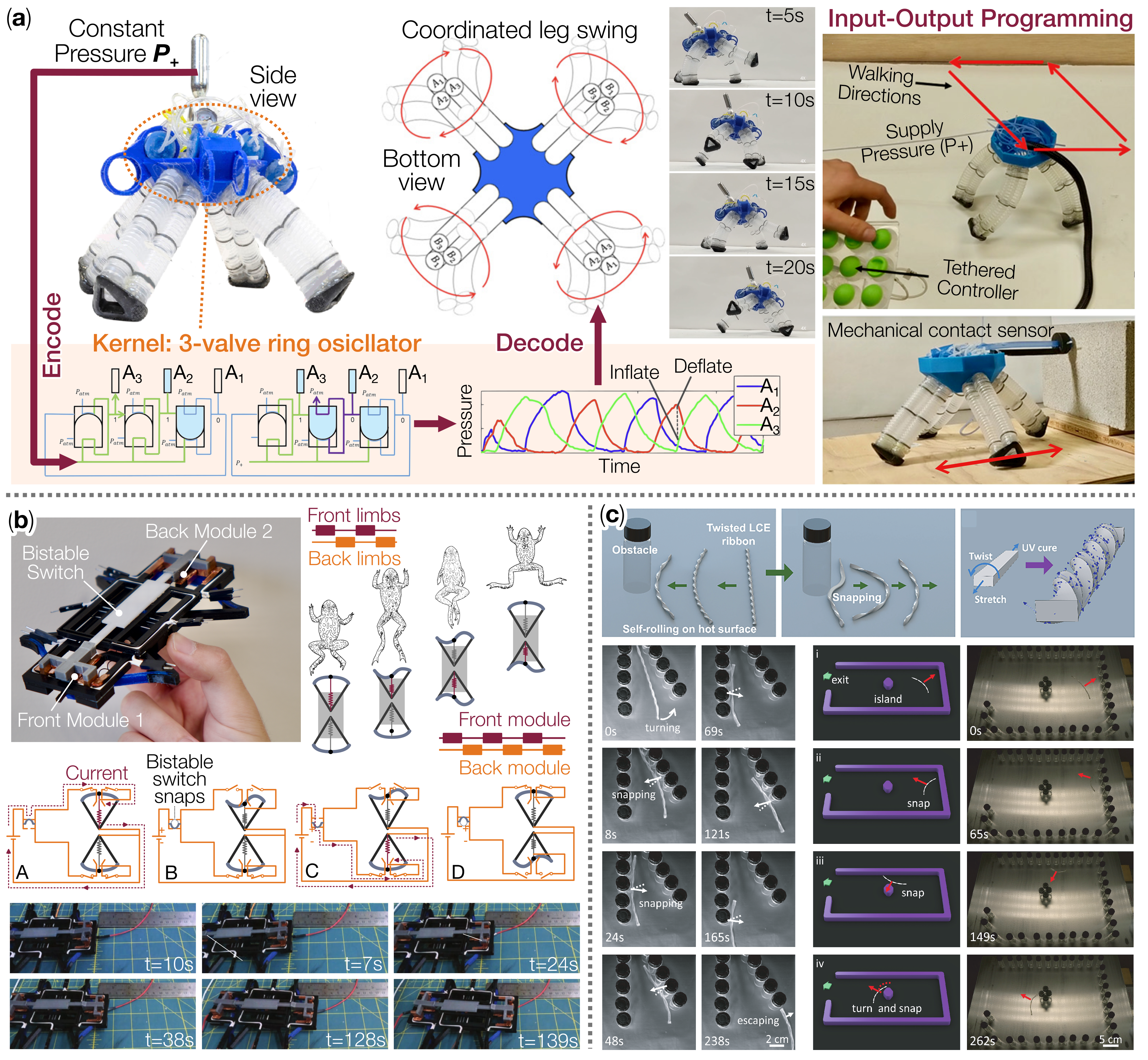
Figure 2: Examples of analog oscillators in soft robots, including pneumatic ring oscillators, SMA-driven self-oscillators, and LCE-based rolling robots for autonomous locomotion and obstacle avoidance.
Physical Reservoir Computing: Information Processing with Body Dynamics
Physical reservoir computing (PRC) leverages the high-dimensional, nonlinear dynamics of soft robotic bodies as computational resources, analogous to recurrent neural networks. The paper distinguishes between open-loop PRC (for perception) and closed-loop PRC (for control):
- Open-loop PRC: The body’s response to actuation encodes information about external stimuli (e.g., payload classification, terrain sensing) that can be decoded via a trained linear readout. This approach enables high-dimensional perception with minimal sensor arrays and low computational overhead.
- Closed-loop PRC: The reservoir’s outputs are fed back to actuators, enabling robust, adaptive, and energy-efficient control of locomotion and manipulation. The readout layer is trained (often via regression) to map body states to control signals, supporting behavior switching and disturbance recovery.
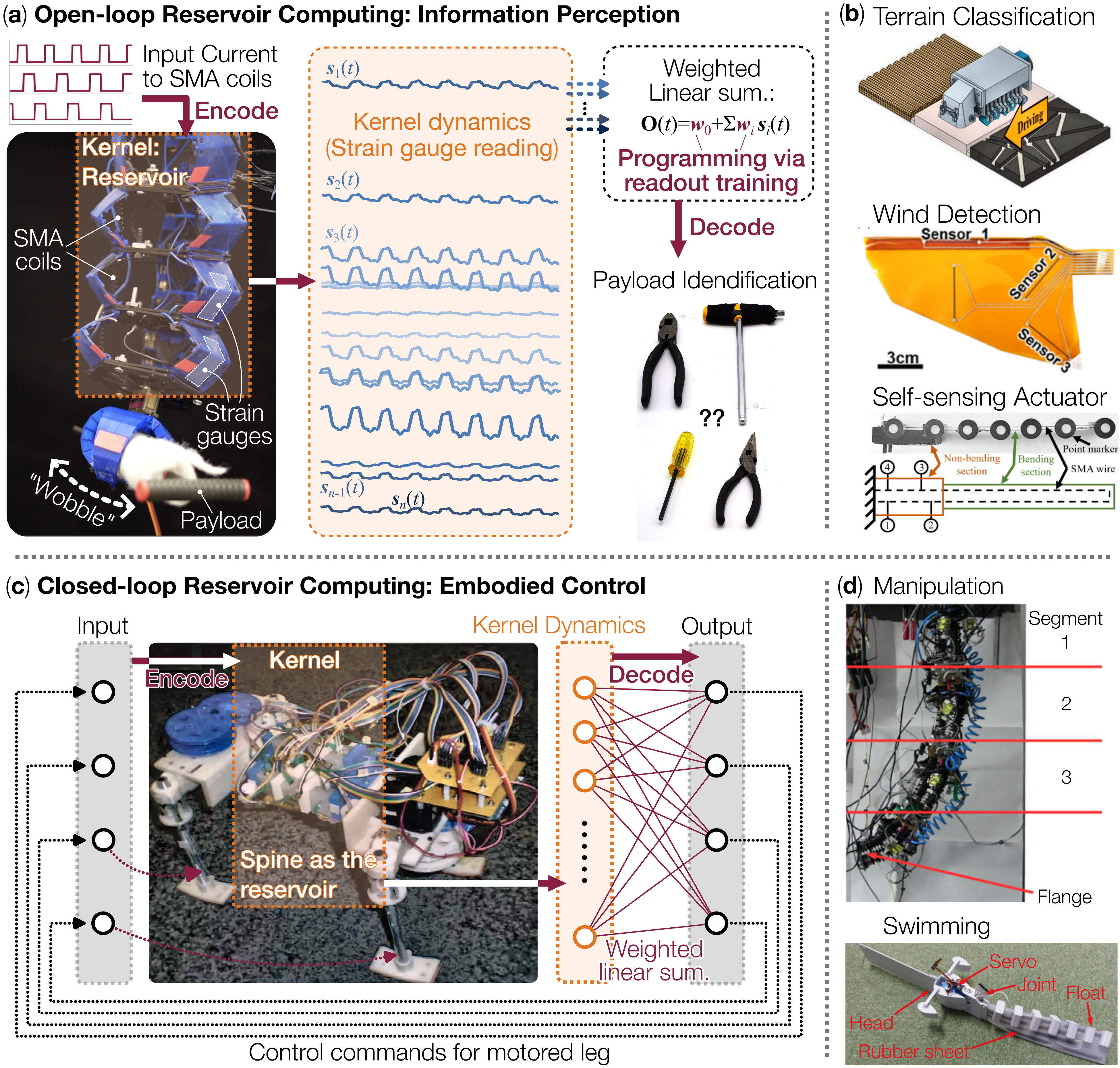
Figure 3: Open- and closed-loop PRC in soft robots, illustrating information perception (payload classification, terrain sensing) and embodied control (locomotion, manipulation) via body dynamics.
Algorithmic Physical Computing: Discrete Logic in Soft Matter
Algorithmic physical computing implements Boolean logic and sequential operations using discrete, bistable mechanical elements, fluidics, or other physical domains. Bistable mechanisms (e.g., elastic beams, membranes, origami folds) serve as mechanical analogs to transistors, enabling the construction of logic gates, memory cells, and timing circuits. The paper highlights:
- Reprogrammable metamaterial processors: Arrays of bistable fluidic unit cells are interconnected to form logic circuits (e.g., SR latches, demultiplexers, ring oscillators) that control robotic fingers, supporting mode switching and persistent memory.
- Complementary soft pneumatic valves and conductive fluidics: These enable the realization of complex logic, analog filtering, and on-body control in soft robots.
- Multi-stable and origami-based mechanisms: These architectures provide programmable logic, memory, and sequencing for locomotion and manipulation.
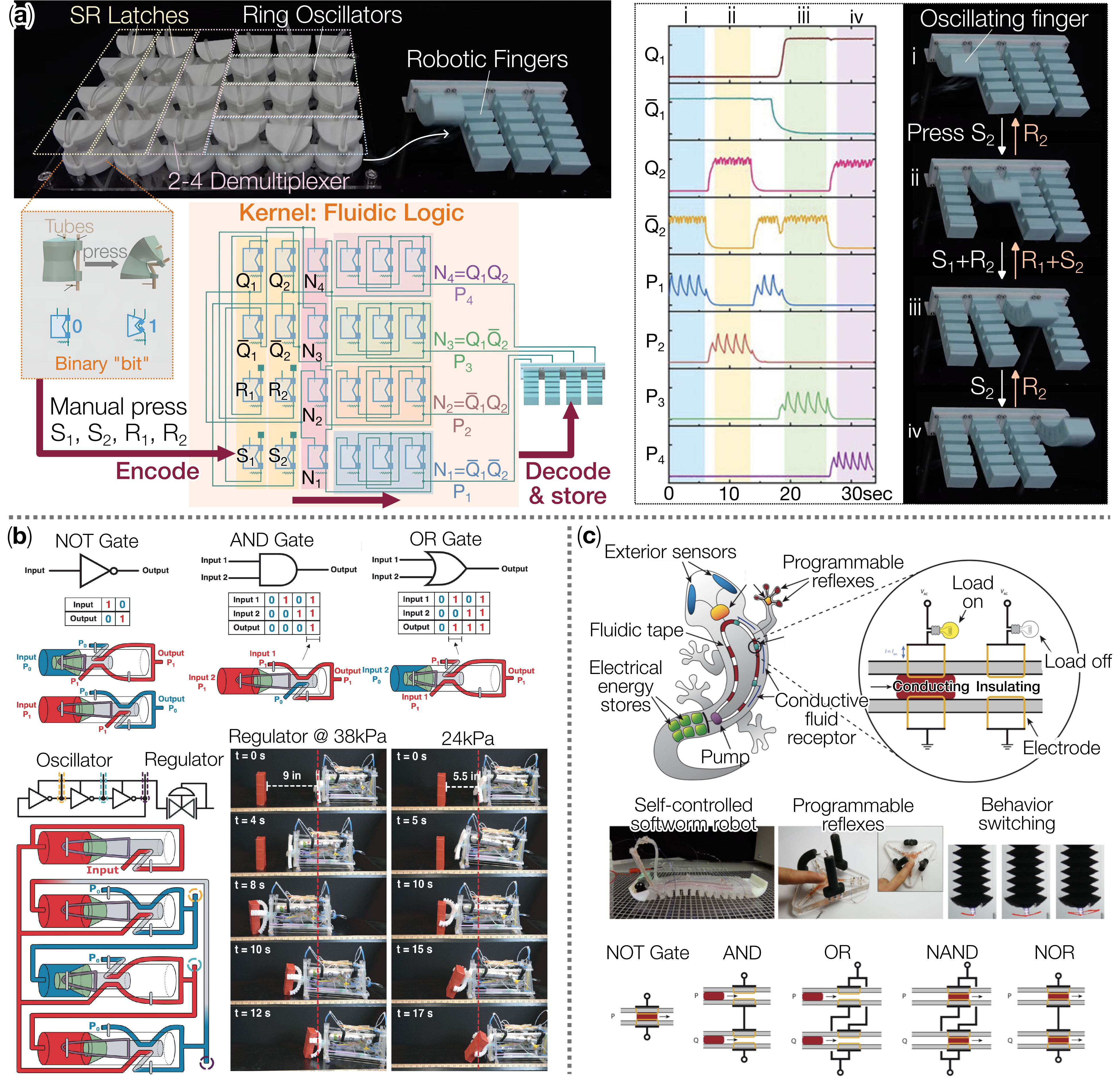
Figure 4: Physical algorithmic computing in soft robots, including reprogrammable metamaterial processors, complementary pneumatic valves, and conductive fluidic logic for actuation and control.
Future Directions: Memory, Miniaturization, and Hybridization
The paper identifies several promising avenues for advancing physical computing in soft robotics:
- Physical Memory: Mechanical metamaterials with bistable or multi-stable units can serve as non-volatile memory (m-bits), enabling robots to store and retrieve information mechanically. Integration of memory with computation remains a key challenge.
- Miniaturized and High-Capacity Circuits: Advances in additive manufacturing and metamaterial design are enabling the development of compact, reprogrammable logic units (e.g., mechanical full-adders, ALUs) that can be embedded in soft robots for onboard computation.
- Mechanical-Electrical Hybrid Circuits: Hybrid systems that combine mechanical computing kernels with simple electronic readouts (e.g., op-amp-based summation) offer enhanced reprogrammability and multi-tasking, bridging the gap between pure physical and digital computation.
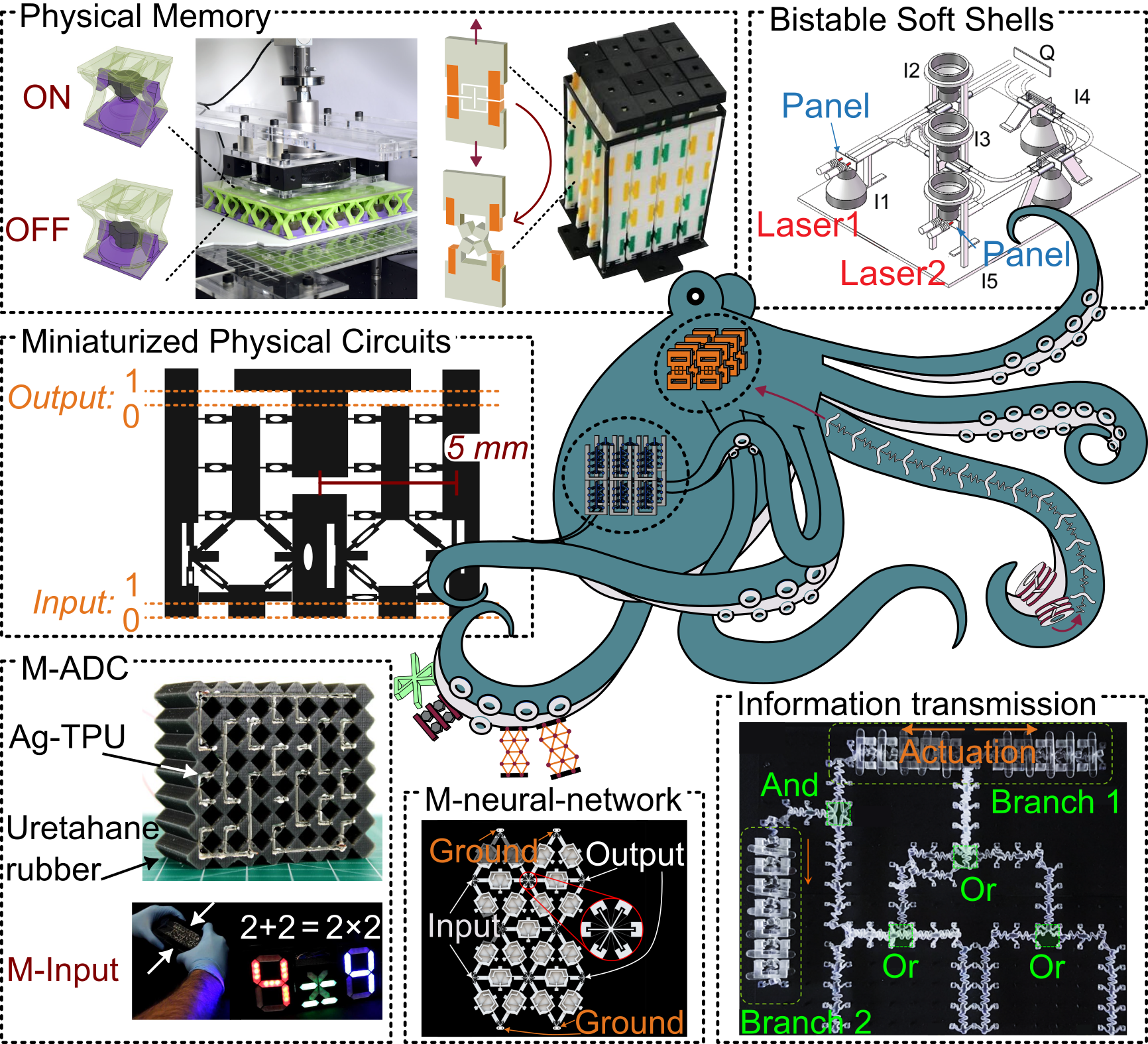
Figure 5: Vision for future soft robots with distributed and centralized physical computing, integrating mechanical memory, logic, analog-to-digital conversion, and hybrid circuits for advanced autonomy.
Implications and Outlook
The integration of physical computing into soft robots has significant implications for the design of robust, energy-efficient, and adaptive autonomous systems. By offloading computation and control to the mechanical domain, these robots can operate with minimal reliance on conventional electronics, enhancing resilience in harsh or resource-constrained environments. The approach also opens new directions for embodied intelligence, where perception, memory, and decision-making are realized through the interplay of material properties, geometry, and physical interactions.
Theoretically, this work bridges material science, information theory, and robotics, suggesting a new paradigm for computation that is not limited to silicon-based electronics. Practically, the demonstrated systems already achieve complex behaviors—such as coordinated locomotion, environment-adaptive control, and programmable manipulation—using purely mechanical or hybrid mechanisms.
Conclusion
This paper provides a comprehensive framework and survey for embodying physical computing in soft robots, spanning analog oscillators, physical reservoir computing, and algorithmic logic. The explicit criteria for physical computation, the detailed mechanisms for input encoding, output decoding, and programmability, and the roadmap for future integration of memory, miniaturized logic, and hybrid circuits collectively establish a robust foundation for the development of mechanically intelligent soft robots. The convergence of these technologies is poised to enable soft robots with advanced autonomy, resilience, and adaptability, with broad implications for robotics, AI, and unconventional computing.