Model-free source seeking of exponentially convergent unicycle: theoretical and robotic experimental results
Abstract: This paper introduces a novel model-free, real-time unicycle-based source seeking design. This design steers autonomously the unicycle dynamic system towards the extremum point of an objective function or physical/scaler signal that is unknown expression-wise, but accessible via measurements. A key contribution of this paper is that the introduced design converges exponentially to the extremum point of objective functions (or scaler signals) that behave locally like a higher-degree power functions (e.g., fourth degree polynomial function) as opposed to locally quadratic objective functions, the usual case in literature. We provide theoretical and simulation results to support out theoretical results. Also, for the first time in the literature, we provide experimental robotic results that demonstrate the effectiveness of the proposed design and its exponential convergence ability.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper shows a new way for a small wheeled robot to “find a source” (like the brightest spot of a light) all by itself, using only what its sensors measure. The method is model-free, which means the robot doesn’t need a map of the signal (light, heat, etc.) or a detailed math model of itself. The big new idea is a control strategy that makes the robot move toward the best spot very quickly, with what scientists call exponential convergence. Even better, it works not only for simple “bowl-shaped” signals, but also for flatter, trickier shapes that are common in the real world.
Goals and Questions
The paper aims to:
- Design a simple robot controller that can find the highest (or lowest) point of a measurement (like light intensity) without knowing its formula.
- Make the robot converge exponentially fast, even when the signal near the peak is flat (like a soft plateau), which is harder than the usual “sharp bowl” case.
- Prove this behavior with math, test it in computer simulations, and show it working on a real robot (TurtleBot3).
- Compare the new method against older, standard methods to show the upgrade is real and practical.
How It Works (Methods and Ideas)
Think of “source seeking” as the hot-and-cold game: the robot moves, senses if it’s getting better or worse, then adjusts to get closer to the “hottest” spot. Here’s how the paper makes that idea work in a precise, real-time way:
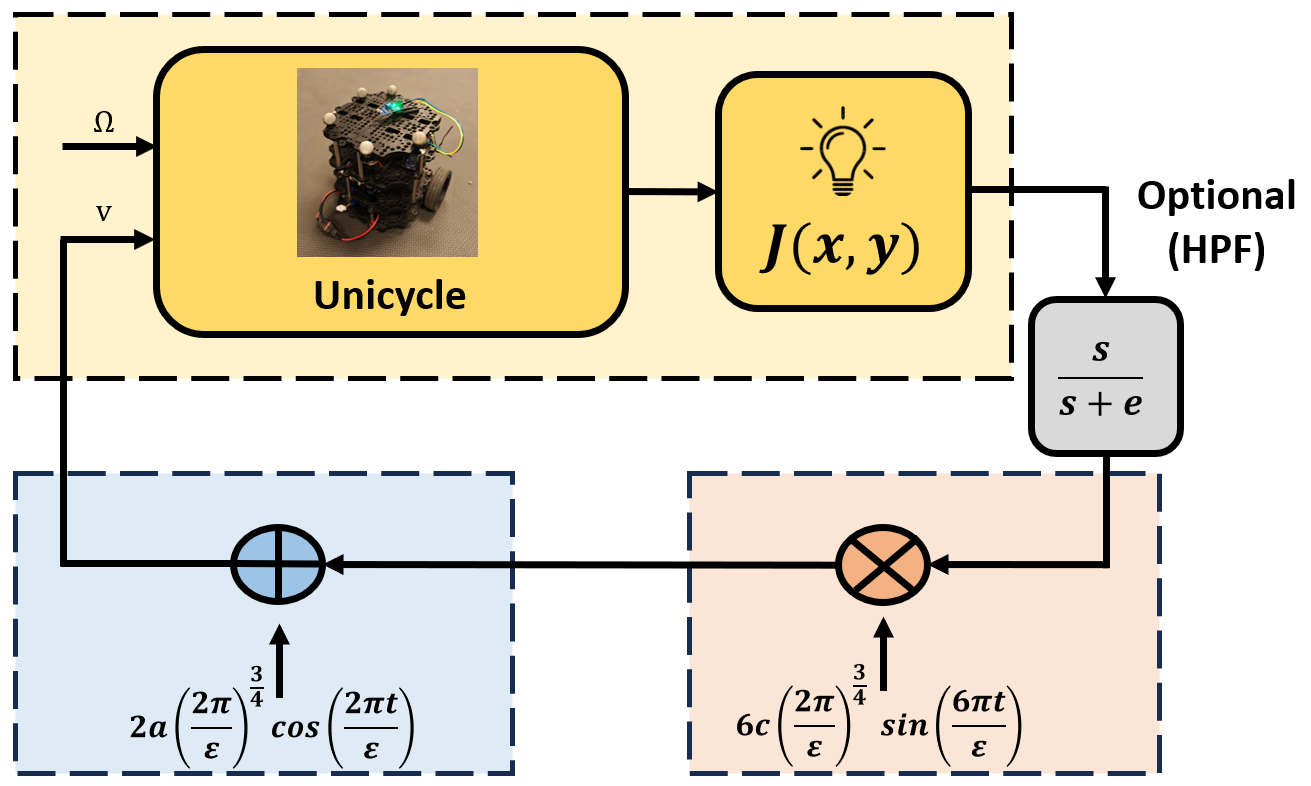
- The robot model: The robot is treated like a “unicycle,” which is a simple way to describe a two-wheeled robot. It has a forward speed v and a steady turning rate Ω. This simple model is common in robotics.
- Model-free control (Extremum Seeking Control, ESC): The robot doesn’t know the signal shape. It only measures it (like brightness). ESC adds tiny, planned wiggles (called dithers) to the robot’s motion and watches how the measurements change. From that, it figures out how to move toward the best spot.
- The wiggle trick (Lie brackets, explained simply):
- Imagine you can only push a box forward or turn it, but by doing small pushes in a smart sequence (forward, turn, forward, turn…), the average effect over time becomes “move diagonally.” Mathematicians call the combined average effect a Lie bracket.
- The paper carefully designs these wiggles so that their average effect points toward the source.
- Importantly, they use a higher-order combination (a “third-order Lie bracket”) to handle flatter signal shapes (like a fourth-degree function near the optimum). This is the key to getting exponential convergence even when the peak is flat.
- Exponential convergence (plain meaning): The distance to the best spot shrinks very fast, like cutting the error by the same fraction over and over (for example, halving it every fixed amount of time). This makes the robot’s approach fast and predictable.
- High-pass filter (optional helper): Sensors can drift or have slow trends. A high-pass filter is like ignoring the slow background changes and focusing on the wiggle-related changes, which makes the method cleaner and more stable.
- Math proof (what they proved):
- They analyze the “average” effect of the wiggles and show the target point is exponentially stable under reasonable choices of parameters.
- Because real systems use small but nonzero wiggles, the real robot gets “practical exponential stability”: it shoots toward the source quickly and then stays in a tiny neighborhood around it (you can make that neighborhood as small as you like by choosing a smaller wiggle scale).
Main Findings and Why They Matter
Here are the key results the paper reports:
- Faster and more reliable convergence in simulations:
- When the signal near the best spot looks like a fourth-degree shape (flatter than a usual bowl), standard methods (which use only first-order wiggles) struggled or were slow.
- The new method with third-order wiggles reached the target in about 20 seconds, while the old method didn’t reach it within 100 seconds under the same conditions.
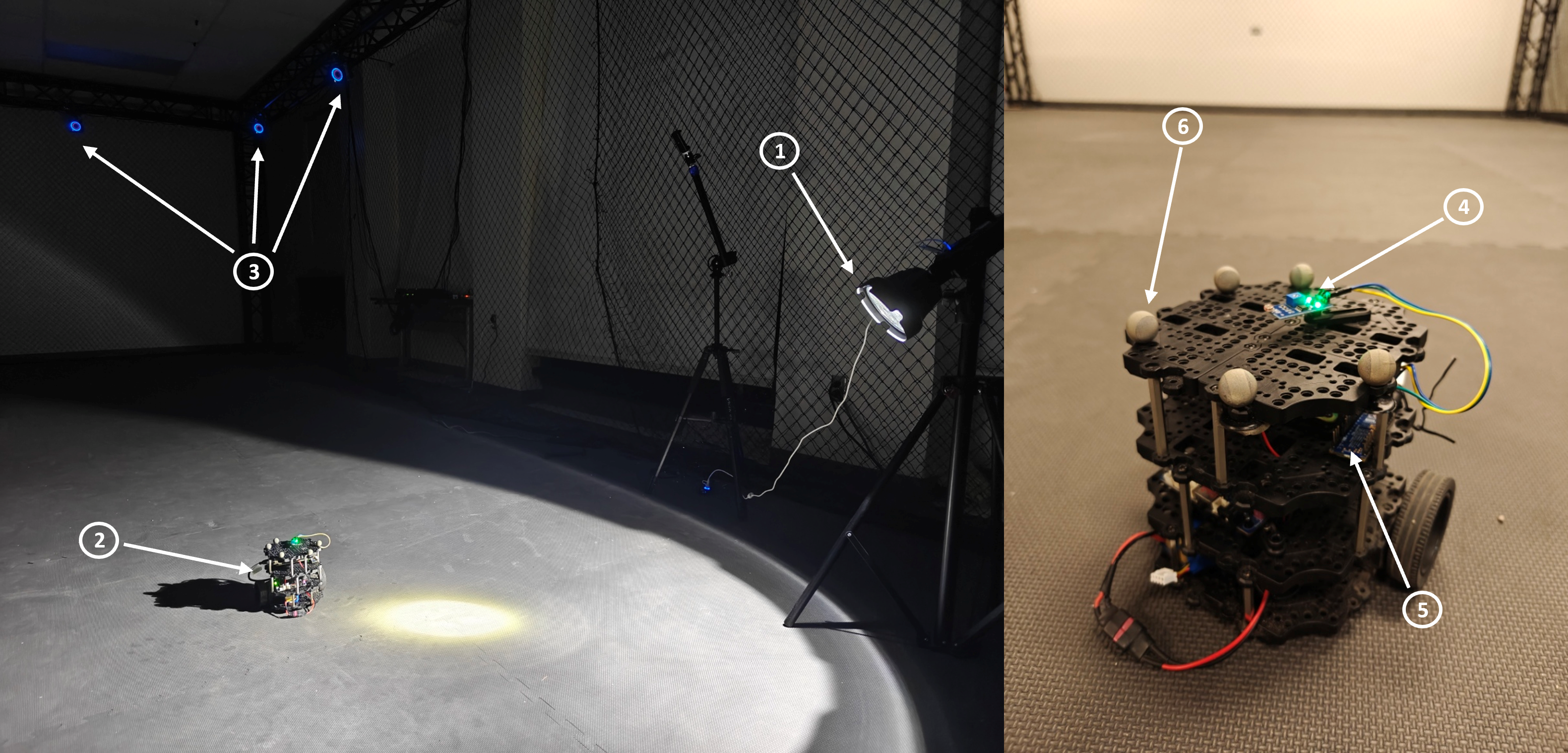
- Real robot experiments with a known test signal:
- Using TurtleBot3 and motion capture, the new method reached the target in roughly 350 seconds and stayed near it.
- The older method didn’t fully reach the true best point even after 1200 seconds, ending with noticeable errors.
- This shows the new design is not just theory—it works in practice and copes with real-world issues like sensor resolution and noise.
- Real robot experiment with a light source (completely model-free):
- The robot used a light sensor reading directly (no math formula of the light field).
- It successfully moved to and hovered around the brightest spot, even though the light field was unknown and could fluctuate.
- This demonstrates true model-free, real-time source seeking in a physical environment.
Why this matters:
- Many real signals are not sharp near their best point—they’re flat and tricky. The new method handles these well and still converges fast.
- Reliable, fast convergence can make robots better at tasks like finding light, chemical leaks, Wi‑Fi hotspots, or heat sources without a map.
What It Means and Where It Could Go
- Practical impact: Robots can now find sources faster and more reliably using only sensor readings, even when the “landscape” near the target is flat and hard to climb.
- Broad applications: Environmental monitoring (finding pollution sources), search-and-rescue (heat or sound), agriculture (sunlight or moisture peaks), and industry (maximizing signal strength).
- Scientific contribution: It’s the first unicycle-based, model-free source-seeking method that proves and demonstrates exponential convergence for higher-order signal shapes.
- Future directions: The authors plan to extend the method to even more complex shapes, reduce small steady wiggles around the target, and design versions with strictly bounded update rates (making it easier to implement on hardware).
In short, this paper upgrades the “hot-and-cold” game for robots: smarter wiggles, faster learning, stronger math guarantees, and real-world success.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise list of what remains missing, uncertain, or unexplored in the paper, framed to be actionable for future research.
- Generalization beyond fourth-degree objectives: The analysis and experiments are restricted to objective functions that behave locally like fourth-degree polynomials; there is no proof or characterization for higher-degree power functions, mixed-degree objectives, or non-polynomial signals.
- Non-separable objective functions: The theory and LBS derivation assume a separable form . Stability for general with mixed partials (e.g., , ) and cross-coupling terms is not addressed.
- Global vs local convergence: The results establish local practical exponential stability on compact sets but do not quantify the region of attraction or provide conditions for global convergence.
- Conservativeness of stability conditions: Theorem 1 imposes narrow ratios between and and a high lower bound on . More general (less conservative) conditions—e.g., time-periodic Lyapunov functions or Barbalat’s lemma—are suggested but not developed.
- Explicit treatment of the high-pass filter: Stability and convergence are analyzed without the HPF; the closed-loop system that includes the filter state (and parameter ) lacks a formal stability proof and sensitivity analysis.
- Parameter tuning guidelines: There is no systematic methodology to select that trades off convergence speed, robustness, and actuator limits. Sensitivity to mis-tuning and robustness margins are not quantified.
- Interaction of dither and heading frequency: The effect of choosing dither frequencies (e.g., , ) relative to the heading rotation on excitation quality, cross-terms, and averaging validity is not analyzed.
- Digital implementation and sampling effects: Timing jitter, sampling/aliasing, and discretization in the embedded implementation (Arduino/ROS) and MCS feedback are not modeled; performance degradation and design adaptations for discrete-time ESC are not studied.
- Robustness to measurement noise and disturbances: Formal robustness guarantees (ISS, bounded disturbance rejection) against sensor noise, drift, bias, and light-field variability are missing, particularly for the model-free light-seeking case.
- Actuator saturation and safety constraints: Theoretical and experimental assurances that the commanded linear velocity and angular rate stay within hardware limits, avoid instability, and ensure safety (e.g., collision avoidance) are absent.
- Steady-state oscillations and energy usage: There is no quantitative characterization of steady-state oscillations, energy consumption, or path efficiency; comparisons to attenuating-oscillation or bounded-update-rate ESC schemes are not provided.
- Domain-specific signal classes: The light source is treated purely experimentally; there is no mathematical class of admissible spatial fields (e.g., smoothness, Lipschitz continuity, unimodality) under which exponential convergence is guaranteed.
- Initialization and region-of-attraction quantification: The influence of initial conditions, especially far from the extremum or in flat regions, on convergence speed and success is not analyzed.
- Multi-agent and cooperative seeking: The design and analysis are single-agent; scalability to multi-robot coordination, collision avoidance, and cooperative extremum seeking remains unexplored.
- Obstacles and environmental constraints: Path feasibility in cluttered environments and integration with obstacle avoidance or MPC layers is not considered.
- Extension to richer robot dynamics: The unicycle model with fixed omits actuator dynamics, slip, delays, and inertia; extension to differential-drive with dynamic heading control or to 3D aerial/underwater vehicles is not analyzed.
- Formal convergence rate bounds: While exponential convergence is stated, explicit bounds on the rate (as functions of ), tracking error, and ultimate bound are not quantified for the full (non-averaged) system.
- Frequency-selective dithers and bracket isolation: The paper assumes C3 isolates the third-order bracket, but rigorous guarantees that other brackets and time-varying terms vanish under the chosen dithers in the time-varying unicycle setting are not detailed.
- Experimental breadth and statistical validation: Results are shown for a single robot and limited scenarios; repeatability, statistical performance metrics across trials, and sensitivity to environmental changes (lighting, surfaces) are not reported.
- Calibration and sensor modeling: The photoresistor’s nonlinear mapping to intensity, orientation effects, saturation, and ambient light variability are not modeled; the impact on ESC performance and required preprocessing is not quantified.
- Comparative benchmarking: Beyond first-order Lie bracket ESC, comparisons to alternative ESC designs (e.g., vanishing dithers, Kalman-filter-based gradient estimation, bounded-update-rate methods) in terms of convergence speed, robustness, and oscillation levels are missing.
- Practical design constraints: Guidelines for preventing excessive commands near the extremum (to reduce jitter), and ensuring smooth trajectories with bounded update rates are not implemented; these are deferred to future work without concrete designs.
Practical Applications
Practical Applications Derived from the Paper
The paper presents a novel, model-free extremum seeking control (ESC) design for unicycle-type robots that achieves exponential convergence to the extremum of a scalar field, even when the field behaves locally like higher-degree power functions (e.g., quartic). It demonstrates real-world robotic experiments (TurtleBot3) and provides stability conditions for third-order Lie bracket excitation. Below are actionable applications grouped by deployment horizon.
Immediate Applications
These applications can be prototyped or deployed now using the methods, parameters, and workflows described in the paper (e.g., TurtleBot3, Arduino-based sensors, ROS, high-pass filtering, third-order Lie bracket dithers, constant angular velocity unicycle kinematics).
- Autonomous light source seeking for lab robots — sector: robotics, education
- Description: Use the ESC controller to locate maxima/minima of light intensity in indoor environments for calibration, inspection, or demonstration.
- Tooling/workflow: TurtleBot3 + photoresistor + Arduino Nano ESP32; ESC node generating C3 dither signals; optional high-pass filter; ROS for telemetry.
- Assumptions/dependencies: Scalar measurement available; relatively smooth light field locally approximable by higher-degree polynomials; constant angular velocity maintained; no obstacles considered.
- RF/Wi‑Fi signal hotspot localization — sector: telecom, facility operations
- Description: Mobile robot automatically finds strongest Wi‑Fi/RF signal “hotspots” for infrastructure placement, troubleshooting, or coverage mapping.
- Tooling/workflow: Replace light sensor with RSSI module; identical ESC pipeline; visualization via motion capture or onboard odometry.
- Assumptions/dependencies: RSSI sampling rate adequate relative to dithering frequency; multipath effects not overly dominant; local field possesses a single dominant extremum.
- Leak/odor source localization in controlled indoor environments — sector: industrial maintenance, safety
- Description: Find sources of gas leaks or odors by following concentration extremes without explicit modeling.
- Tooling/workflow: Chemical concentration sensor (e.g., VOC, methane); HPF to mitigate sensor drift; safety envelope to cap linear velocity; ESC parameter tuning (ε, Ω) per Theorem constraints.
- Assumptions/dependencies: Safe gas levels; well-ventilated, non-turbulent space; local monotonic gradient toward leak; non-reactive sensor dynamics.
- Heat hotspot detection for electronics racks — sector: data centers, manufacturing
- Description: Navigate to thermal hotspots for preventive maintenance.
- Tooling/workflow: Infrared temperature sensor; ESC pipeline; motion capture or SLAM for tracking; bounded update rates to avoid excessive oscillations.
- Assumptions/dependencies: Accessible scalar temperature field; minimal airflow disturbances; unicycle model-valid motion.
- Autonomous docking signal seeking — sector: consumer robotics
- Description: Vacuum/warehouse robots seek docking station by maximizing beacon signal strength.
- Tooling/workflow: Beacon sensor; ESC velocity modulation; set dwell logic near extremum; ROS integration.
- Assumptions/dependencies: Single beacon dominant; obstacle-free or basic avoidance; docking precision handled by local controller near extremum.
- Fast parameter tuning in testbeds without gradients — sector: software/hardware R&D, academia
- Description: Model-free tuning of testbed parameters (e.g., PID gains, calibration offsets) by mapping performance metrics to a scalar objective and applying ESC.
- Tooling/workflow: ESC with high-order Lie bracket dithers to accelerate convergence in “flat” objective regions; HPF to suppress noise; logging via ROS.
- Assumptions/dependencies: Objective measurable in real time; local high-order behavior (near-optimum flatness) where exponential convergence is beneficial.
- Environmental sensing demos and coursework — sector: education
- Description: Laboratory modules teaching extremum seeking, Lie brackets, and unicycle kinematics with hands-on source seeking.
- Tooling/workflow: Curriculum using TurtleBot3 kits; ESC parameter sweeps; visualizations of trajectories and objective values.
- Assumptions/dependencies: Indoor controlled experiments; motion capture or reliable odometry.
- Process monitoring in small lab reactors (temperature, pH, turbidity) — sector: chemical/process labs
- Description: Mobile probe seeks extrema of scalar process signals across a lab setup for quick diagnostics.
- Tooling/workflow: Sensor payload on robot; ESC loop; HPF to handle sensor latency; safety constraints on velocity near glassware.
- Assumptions/dependencies: Lab layout navigable; sensors sample sufficiently fast; non-hazardous materials.
- Photographic lighting optimization for studio robots — sector: media/arts
- Description: Robot adjusts position to maximize lighting quality measured by a photometric scalar (e.g., exposure metric).
- Tooling/workflow: Camera feedback converted to scalar; ESC targeting maximization; dwell near extremum and minor exploration.
- Assumptions/dependencies: Stable lighting fixtures; measurement conversion robust; unicycle motion acceptable in studio.
- Benchmarking and validation platform for ESC research — sector: academia
- Description: Use the paper’s design as a baseline to compare ESC variants (attenuating oscillations, bounded update rates, gradient estimators).
- Tooling/workflow: Plug-in ESC implementations (C1–C3 dithers); dataset collection; reproducible experiment scripts; TurtleBot3 platform.
- Assumptions/dependencies: Availability of hardware and motion capture; consistent objective fields.
Long-Term Applications
These require further research, scaling, integration (multi-agent, 3D vehicles), robustification (obstacles, turbulence), and regulatory/safety frameworks. They may also need generalization beyond quartic-like local behavior.
- Multi-agent cooperative source seeking (UAVs/UUVs/UGVs) — sector: robotics, defense, environmental monitoring
- Description: Teams locate sources faster and robustly, sharing field measurements; swarm extremum seeking with formation constraints.
- Tooling/workflow: Distributed ESC with consensus; obstacle avoidance; communication topology; cooperative dithering schedules.
- Assumptions/dependencies: Multi-agent coordination under intermittent communication; collision avoidance; field dynamics amenable to distributed ESC.
- 3D plume seeking in turbulent environments — sector: environmental, emergency response
- Description: UAVs/AUVs track chemical/thermal plumes in outdoor conditions with turbulence and advection.
- Tooling/workflow: 3D ESC for underactuated vehicles; adaptive dithers; robust filtering; wind/water flow estimation aiding ESC.
- Assumptions/dependencies: Advanced sensors; field not too chaotic for ESC convergence; safety envelopes; airspace/waterway regulations.
- Radiation source localization for public safety — sector: policy, defense, nuclear safety
- Description: Robots autonomously localize radiation sources in emergency scenes or inspections.
- Tooling/workflow: Radiation dosimeters; hardened platforms; ESC with bounded update rates; safety protocols; standardized test procedures.
- Assumptions/dependencies: Regulatory approval; reliable sensing; shielding and decontamination workflow; single dominant source.
- Industrial leak detection at scale (refineries, pipelines) — sector: energy, manufacturing
- Description: Fleet of robots/UAVs map and seek leak extrema across large facilities with obstacles.
- Tooling/workflow: ESC integrated with SLAM and MPC for obstacle avoidance; scheduling; high-reliability comms; GIS integration.
- Assumptions/dependencies: Ruggedized hardware; compliance with industrial safety standards; field models may be multi-extremal.
- RF interference hunting in complex buildings/campuses — sector: telecom
- Description: Autonomous agents identify and localize interference sources to improve network reliability.
- Tooling/workflow: ESC + RF fingerprinting; multi-floor navigation; human-in-the-loop verification; reporting pipeline.
- Assumptions/dependencies: Multipath-dense environments; multi-extremum landscapes; mapping and localization accuracy.
- Solar farm maintenance (reflectivity/illumination field optimization) — sector: energy
- Description: Robots seek maxima/minima of illumination/reflection to identify panel faults, shading issues.
- Tooling/workflow: Optical sensors; ESC; maintenance scheduling; anomaly detection fused with ESC trajectories.
- Assumptions/dependencies: Outdoor variability; large-scale navigation; integration with asset management.
- Medical robotics for signal-based navigation (ultrasound intensity, EM fields) — sector: healthcare
- Description: Micro-/macro-robots navigate to signal-defined targets in clinical settings without explicit models.
- Tooling/workflow: ESC adapted for medical signals; stringent safety controllers; validation under biomedical regulations.
- Assumptions/dependencies: Clinical trials; patient safety; robust sensing with strict latency constraints; ethical approvals.
- Autonomous calibration and optimization in smart factories — sector: manufacturing
- Description: Robots perform continuous model-free tuning of stations by seeking extrema of performance metrics.
- Tooling/workflow: ESC integrated with factory control; bounded update rates; coexistence with human workers (safety).
- Assumptions/dependencies: ISO/IEC safety standards; clear metrics; multi-extremum management; interference with existing controllers.
- Standardization and policy frameworks for source-seeking robots — sector: policy, standards
- Description: Develop test methods, safety guidelines, and deployment protocols for ESC-based source seeking in public spaces and industrial sites.
- Tooling/workflow: Certification processes; compliance checklists; simulation-to-field validation pipelines.
- Assumptions/dependencies: Cross-agency collaboration; liability frameworks; public acceptance; risk assessments.
- Generalized ESC for high-order objectives with reduced oscillations and bounded updates — sector: control software, robotics
- Description: Productizing ESC libraries with exponential convergence across varying objective orders, including attenuating oscillations and update-rate constraints.
- Tooling/workflow: Software SDKs for ROS/embedded systems; auto-tuning of ε, Ω, a, c; diagnostic tools for field behavior.
- Assumptions/dependencies: Theoretical generalization beyond quartic; robust parameter selection algorithms; compatibility with diverse platforms.
Notes on Feasibility and Dependencies
- Signal measurement: The approach assumes the scalar field is directly measurable and sufficiently sampled relative to the dithering frequency.
- Local field behavior: Exponential convergence is proved for objectives locally behaving like fourth-degree power functions; real fields may deviate, leading to practical (not strict) convergence.
- Dynamics and kinematics: Uses unicycle model with constant angular velocity and modulated linear velocity; other platforms need adaptation.
- Stability conditions: Parameter constraints on c1, c2, Ω (from Theorem 1) must be satisfied; tuning is nontrivial and application-specific.
- Oscillations and bounded update rates: Dithers can cause oscillations; HPF helps but may be insufficient in noisy/turbulent environments; future work aims to reduce oscillations and bound updates.
- Safety and obstacles: The presented design does not include obstacle avoidance; integration with SLAM/MPC is needed for cluttered spaces.
- Multi-extremum fields: ESC targets a local extremum; additional logic is required to disambiguate multiple extrema and avoid suboptimal convergence.
- Sensing noise and latency: High-pass filters mitigate drift, but sensor dynamics must be faster than control dithers; sensor calibration is crucial.
- Regulatory constraints: Applications in public spaces (UAVs, hazardous materials) require compliance with safety and privacy regulations.
Glossary
- Barbalat’s lemma: A result in control theory used to prove convergence of certain signals over time; often applied to show stability of time-varying systems. "We expect that more general conditions could be derived by using, for example, a Lyapunov function with time-periodic coefficients or by applying Barbalatâs lemma."
- Control-affine ESC: An extremum seeking formulation where the system dynamics are affine (linear plus constant) in the control inputs. "We consider the two-input control-affine ESC of the following form as in \cite{grushkovskaya2025extremum}:"
- Differential drive: A locomotion type for mobile robots with two independently driven wheels, enabling turning by speed differences; commonly used for unicycle-like robots. "We use the proposed unicycle design for differential drive robotic experiments."
- Dithers: Small periodic perturbations injected into inputs to probe the objective and excite higher-order effects for extremum seeking. "such that the dithers, and excite the Lie bracket"
- Exponential convergence: The property that the error decays at a rate proportional to an exponential function, e.g., e{-kt}. "A key contribution of this paper is that the introduced design converges exponentially to the extremum point of objective functions"
- Exponential stability: A strong form of stability where trajectories converge to equilibrium at an exponential rate. "Then the equilibrium of system~\eqref{LBS} is exponentially stable."
- Extremum seeking control (ESC): A model-free real-time method that drives a system to the maximum or minimum of a measurable objective without knowing its explicit form. "Extremum seeking control (ESC) techniques are model-free, real-time control methods that drive a system to the optimum of a given objective function"
- High-pass filter (HPF): A filter that removes low-frequency components to reduce bias or drift in measured signals used by the controller. "including an optional high-pass filter (HPF) into the system"
- Kinematic differential equations: Equations describing motion in terms of velocities and geometry, without explicit dynamics (forces), used to model robot movement. "Let us consider the kinematic differential equations for unicycle dynamics with constant angular velocity as follows"
- Lie bracket: The commutator of vector fields capturing nonlinear interaction effects; central to averaging and ESC analysis. "such that the dithers, and excite the Lie bracket $g_{I_N}(z)=\big[\big[\dots[g_1,\underbrace{g_2],g_2\big],\dots,g_2\big]}_{N-1\ \text{times}\dots]\big](z)$"
- Lie bracket averaging: A method that uses oscillatory inputs and Lie brackets to derive averaged dynamics for stability and convergence analysis. "unicycle-based methods for source-seeking often resort to Lie bracket averaging (\cite{durr2013lie,scheinker2017bounded,grushkovskaya2018class,ghadiri2020normalized,pokhrel2023higher}) in theoretical analysis and design."
- Lie bracket system (LBS): The averaged system obtained from the original oscillatory dynamics by isolating the effect of a specific Lie bracket. "The corresponding LBS to \eqref{eq:full_unicycle_system_with_hpf} without the optional HPF (i.e., ) is a third-order LBS based on condition C3"
- Lyapunov function: An energy-like scalar function used to prove stability by showing it decreases along system trajectories. "as they result from the particular choice of the Lyapunov function used in the proof."
- Model-free Optimization: Optimization of a system’s performance using only measurements, without an explicit model of the system or objective. "Model-free Optimization"
- Motion capture system (MCS): A positional tracking system that measures the robot’s coordinates for feedback and evaluation. "a motion capture system (MCS) is used to track the robotâs position in the coordinates."
- Photoresistor: A light-dependent resistor whose resistance changes with incident light, used to measure light intensity. "The light sensor consists of a small photoresistor that measures the intensity of light incident on its surface."
- Practical exponential stability: Convergence to a small neighborhood of the equilibrium at an exponential rate due to averaging approximations and small parameters. "more details on the concept of practical exponential stability."
- Source-seeking: The task of autonomously steering a system to the maximum or minimum of a spatially distributed signal using only onboard measurements. "Source-seeking is the problem of steering a system (e.g., a mobile robot) autonomously to the maximum or minimum intensity of a physical/scaler signal"
- Third-order Lie bracket: A nested Lie bracket of depth three used to design ESC for higher-order objective functions. "we will be interested in third-order Lie bracket excitation (i.e., condition C3)."
- TurtleBot3: A widely used differential-drive mobile robot platform for research and experiments. "Our experimental demonstration uses TurtleBot3 robots"
- Unicycle dynamics: A simplified planar robot model with a single forward speed and a fixed rotation rate, representing differential-drive motion. "Let us consider the kinematic differential equations for unicycle dynamics with constant angular velocity"
- Vector field: A mapping from state to velocity used to define system dynamics and Lie brackets in ESC design. "Moreover, we adopt all mathematical assumptions on the vector fields , provided in \cite[Section II]{grushkovskaya2025extremum}."
Collections
Sign up for free to add this paper to one or more collections.