- The paper introduces a source-free fluidic gripper that utilizes bistable snap-through chambers for autonomous, size-selective, and stiffness-adaptive grasping.
- Simulation and experimental results confirm that tilt angles ≥45° yield robust bistability and energy-efficient state transitions for rapid actuation.
- Grasping experiments demonstrate that the gripper passively adapts its internal pressure based on object stiffness, enabling safe handling of both fragile and rigid items.
Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping
Introduction and Motivation
The paper introduces a self-contained, source-free fluidic gripper architecture that leverages bistable snap-through chambers for autonomous, size-selective, and stiffness-adaptive grasping. Conventional fluid-driven soft grippers typically require external pumps or pressure sources, which limit portability and operational autonomy, especially in underwater or field environments. The proposed design circumvents these limitations by utilizing internal liquid redistribution among three interconnected bistable chambers—one contact chamber and two gripping chambers—enabling actuation and shape retention without continuous energy input.
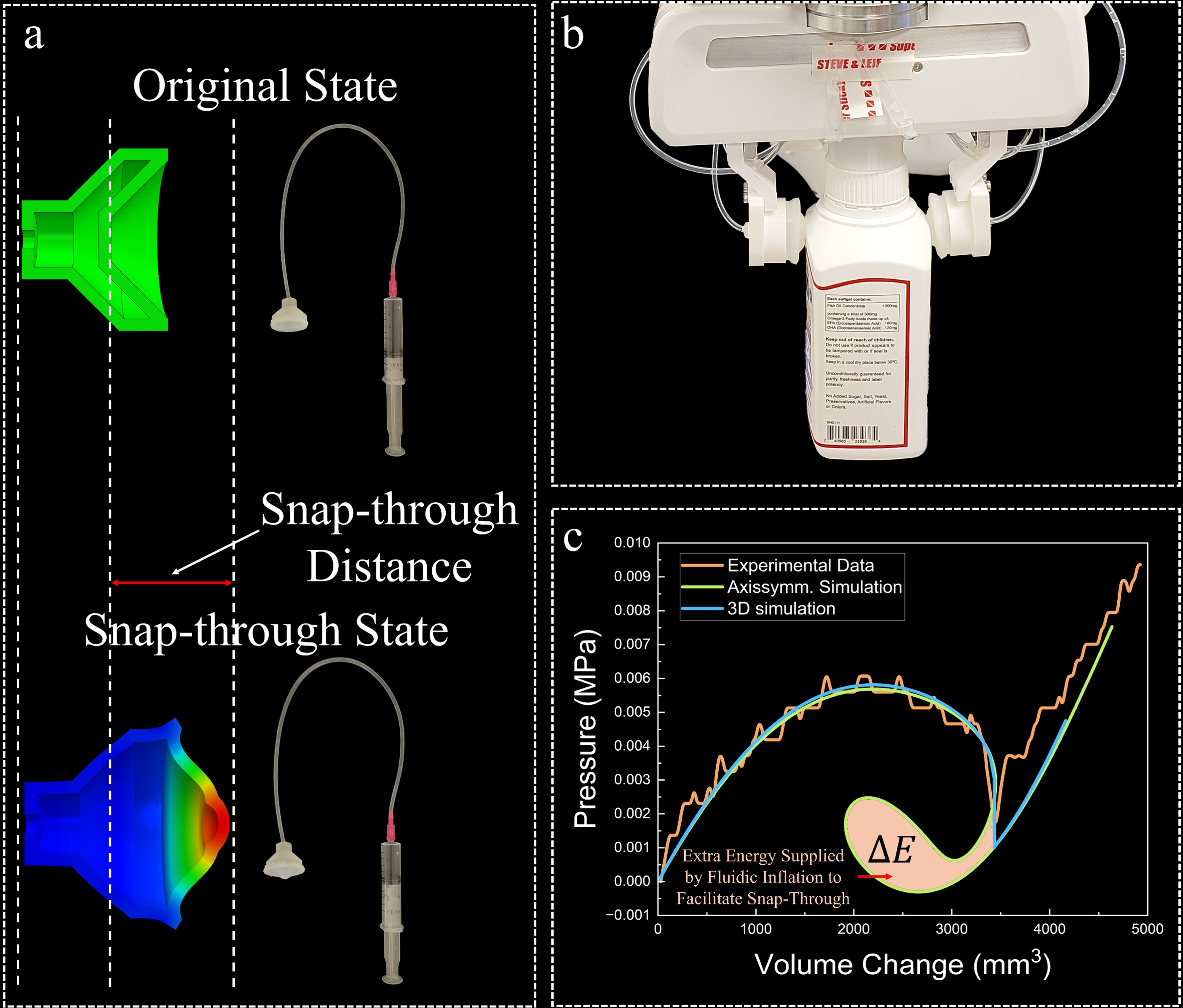
Figure 1: Working mechanism of the self-sustaining fluid-driven gripper, including the snap-through response and pressure-volume characteristics from simulation and experiment.
Design Principles and Simulation Methodology
Bistable Chamber Geometry
The gripper's core is its bistable snap-through membrane, whose geometry is parameterized primarily by the tilt angle. Finite element analysis (FEA) in ABAQUS was employed to optimize the tilt angle, with both 3D and axis-symmetric models. The bistable response is characterized by a non-monotonic pressure-volume curve with negative pressure regions and an enclosed area between equilibrium and snap-through paths, indicating energy-efficient state transitions and shape retention.
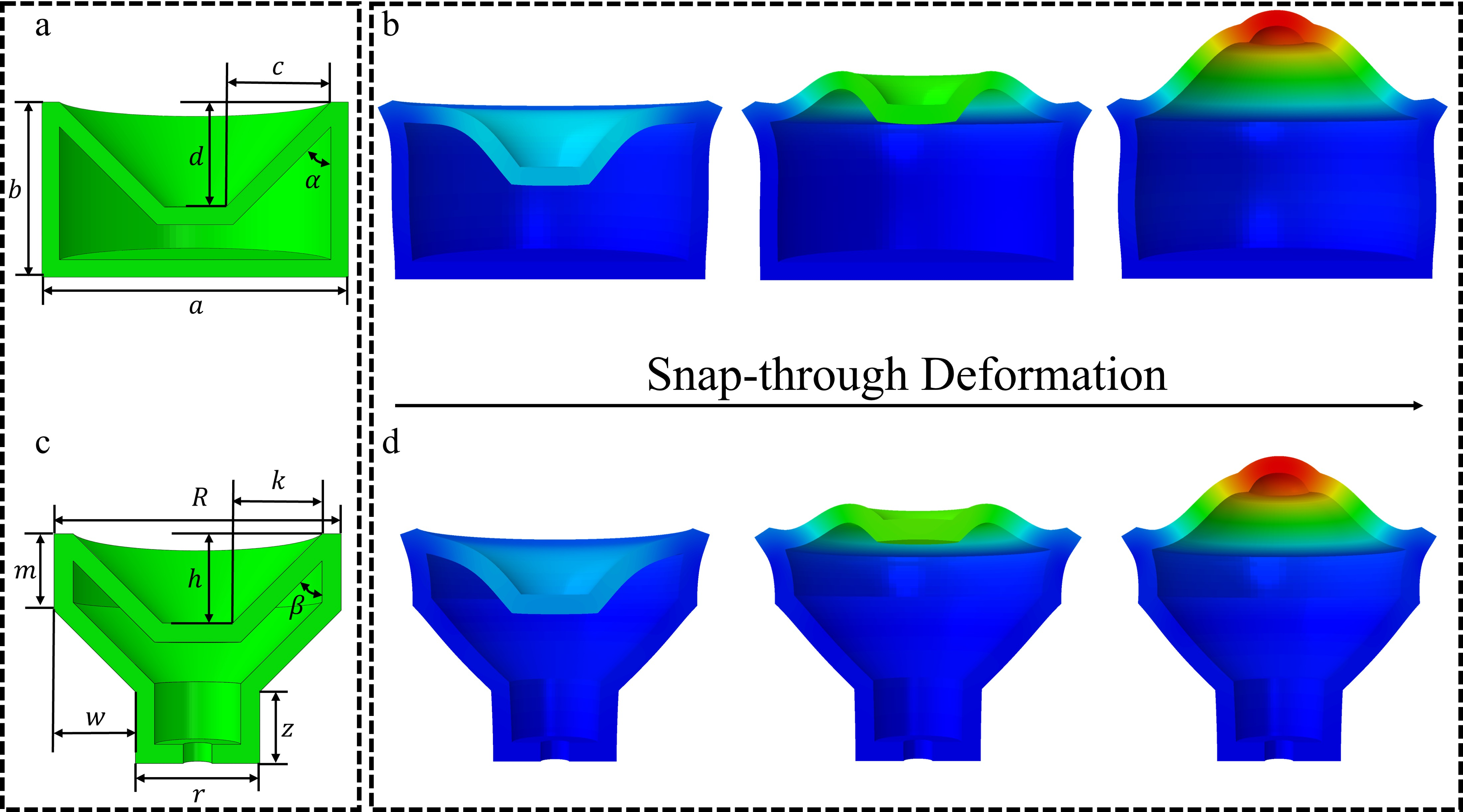
Figure 2: 3D modeling and simulation of the contact and gripping chambers, showing deformation under quasi-static analysis.
Simulation results demonstrate that only tilt angles ≥45∘ yield robust bistability, with negative pressure and sufficient energy release for rapid snap-through. Material selection (Ecoflex 00-30, Dragon Skin 00-30, Sil950) affects the pressure threshold but not the qualitative bistable behavior.
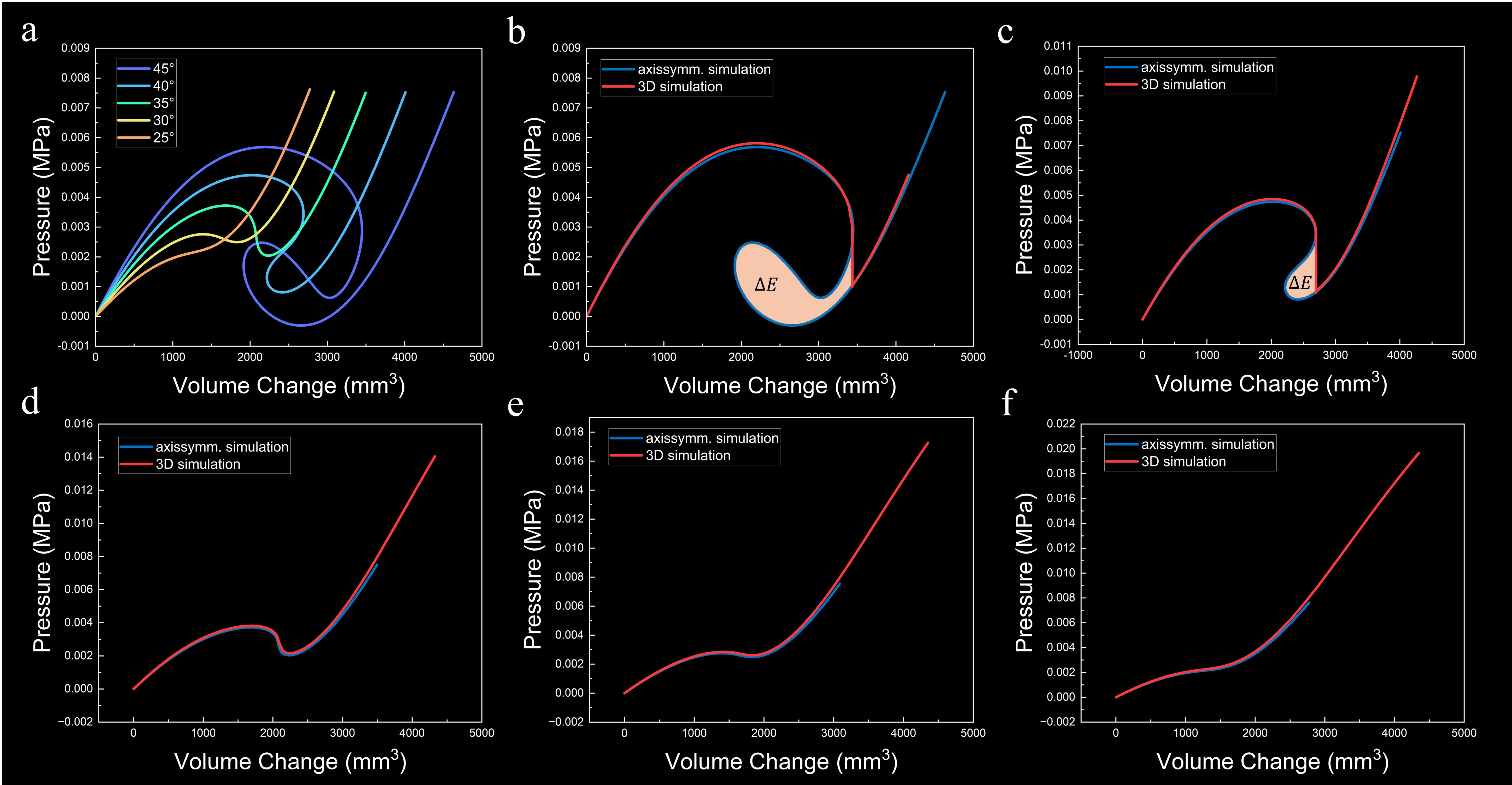
Figure 3: Pressure–volume response for snap-through membranes with varying tilt angles, highlighting the critical role of tilt angle in bistability.
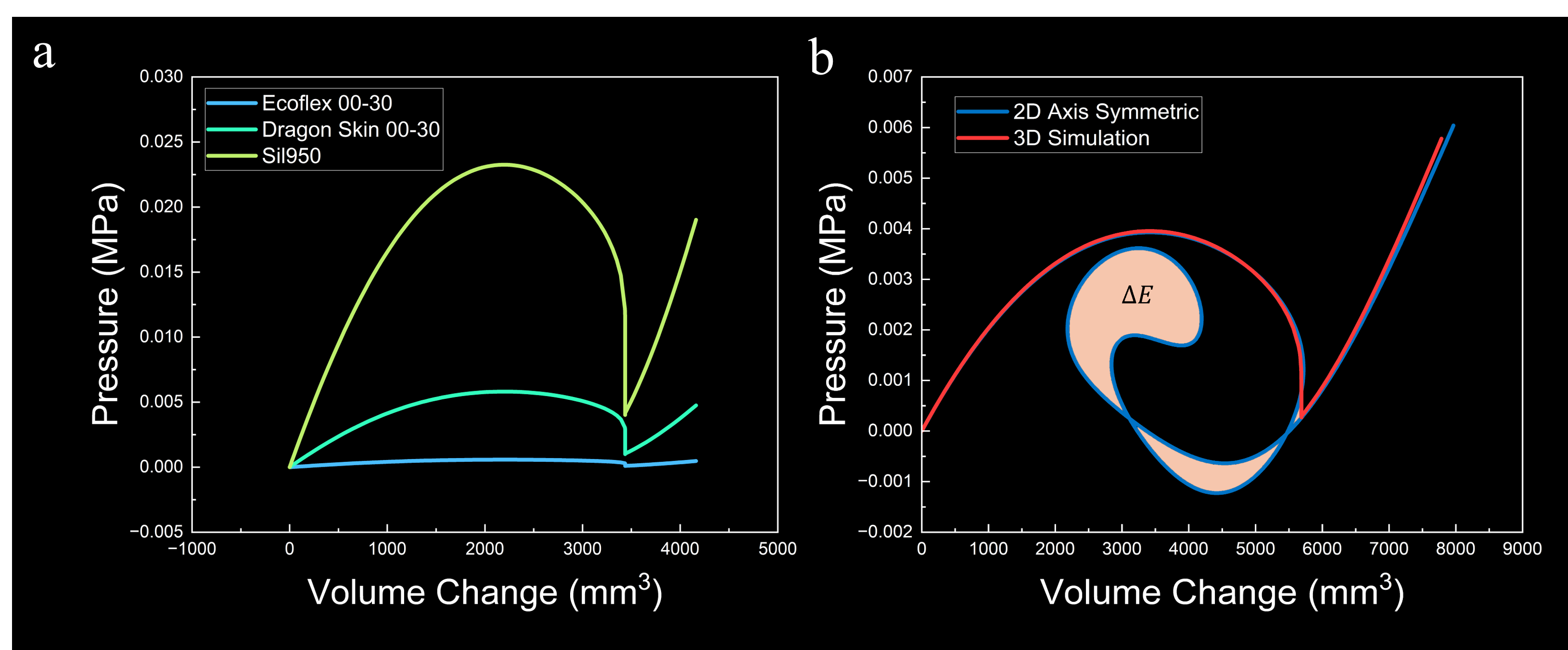
Figure 4: Pressure–volume response for 45∘ tilt angle membranes, showing material effects and bistable characteristics.
Experimental Implementation
Module Fabrication
The gripper module comprises two rigid clamping fixtures and three silicone chambers. The fixtures are 3D-printed, while the chambers are cast from Dragon Skin 00-30 to balance sensitivity and gripping force. The chambers are interconnected and filled with water, forming a closed hydraulic circuit. The module is mounted on a robotic arm for proof-of-concept demonstrations.
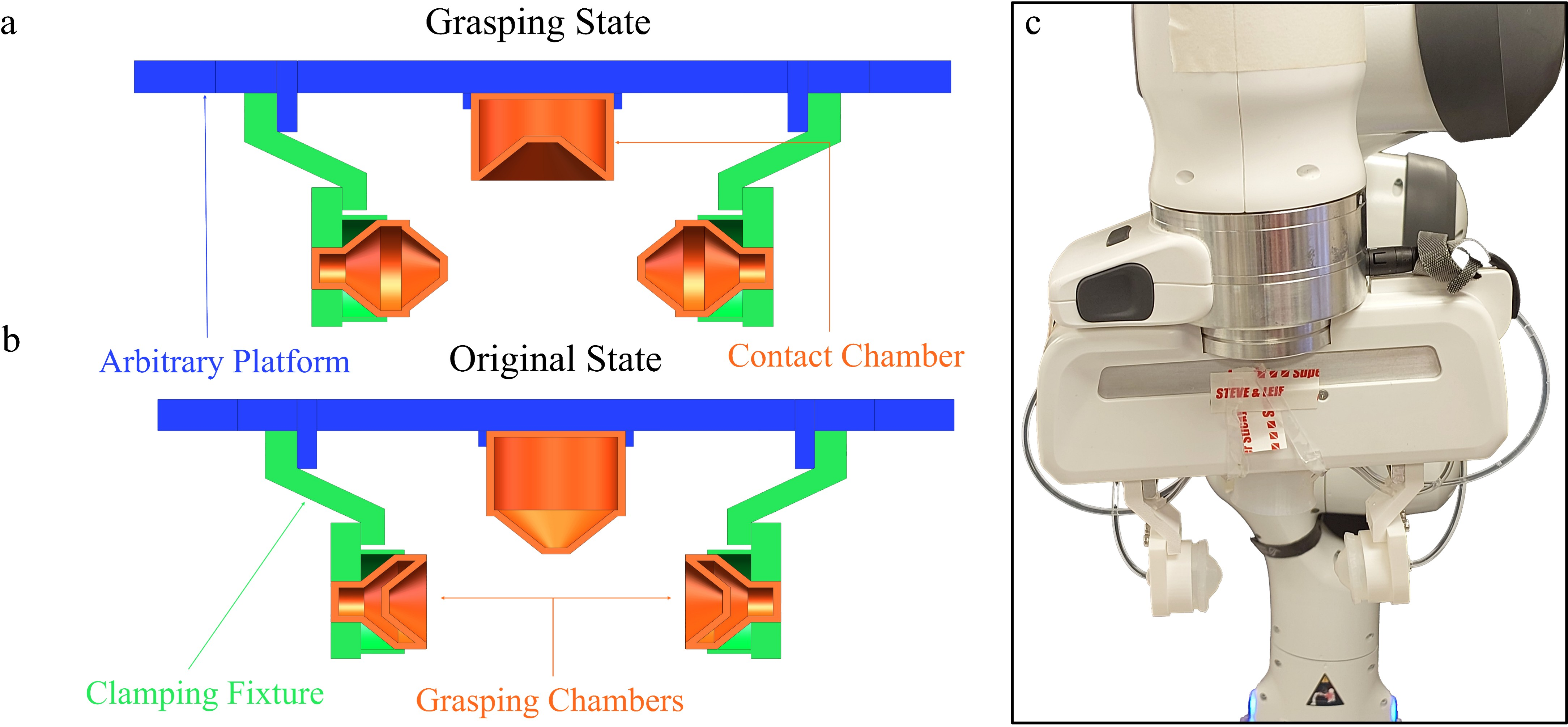
Figure 5: Design and experimental setup of the gripping module, including mounting on a robotic arm.
Mechanical Response Characterization
A custom test rig with a syringe pump, pressure sensors, and data logger was used to characterize the chamber's mechanical response under quasi-static inflation, both with and without obstruction by silicone blocks of varying stiffness.
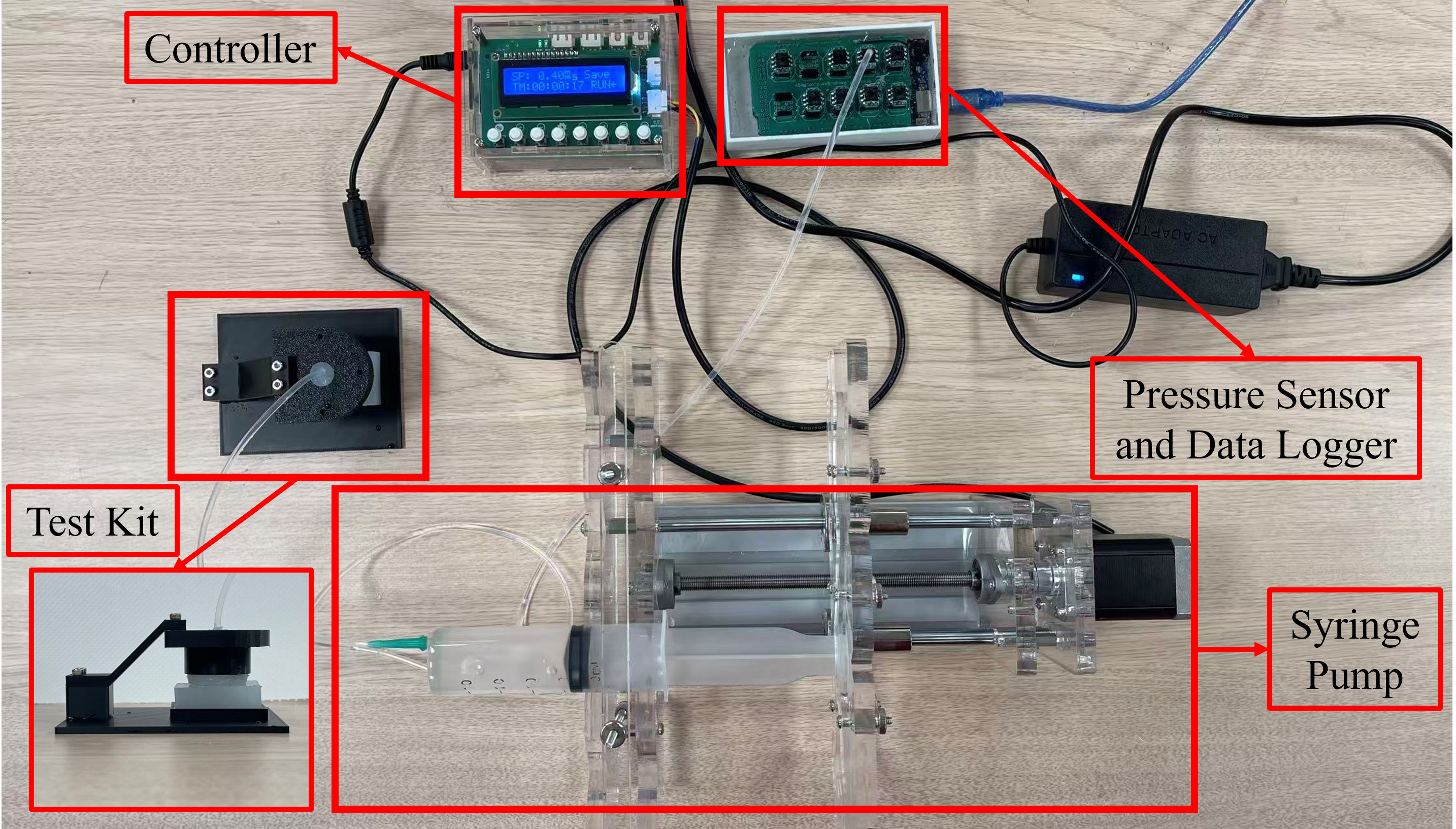
Figure 6: Experimental setup for mechanical response characterization of the snap-through chamber.
The snap-through process is divided into three phases: pre-contact deformation, contact and completion of snap-through, and post-snap-through pressurization. The presence and stiffness of the object significantly affect the pressure evolution and deformation, with stiffer objects yielding higher reaction pressures (up to 14 kPa) and softer objects resulting in lower pressures (2–4 kPa).
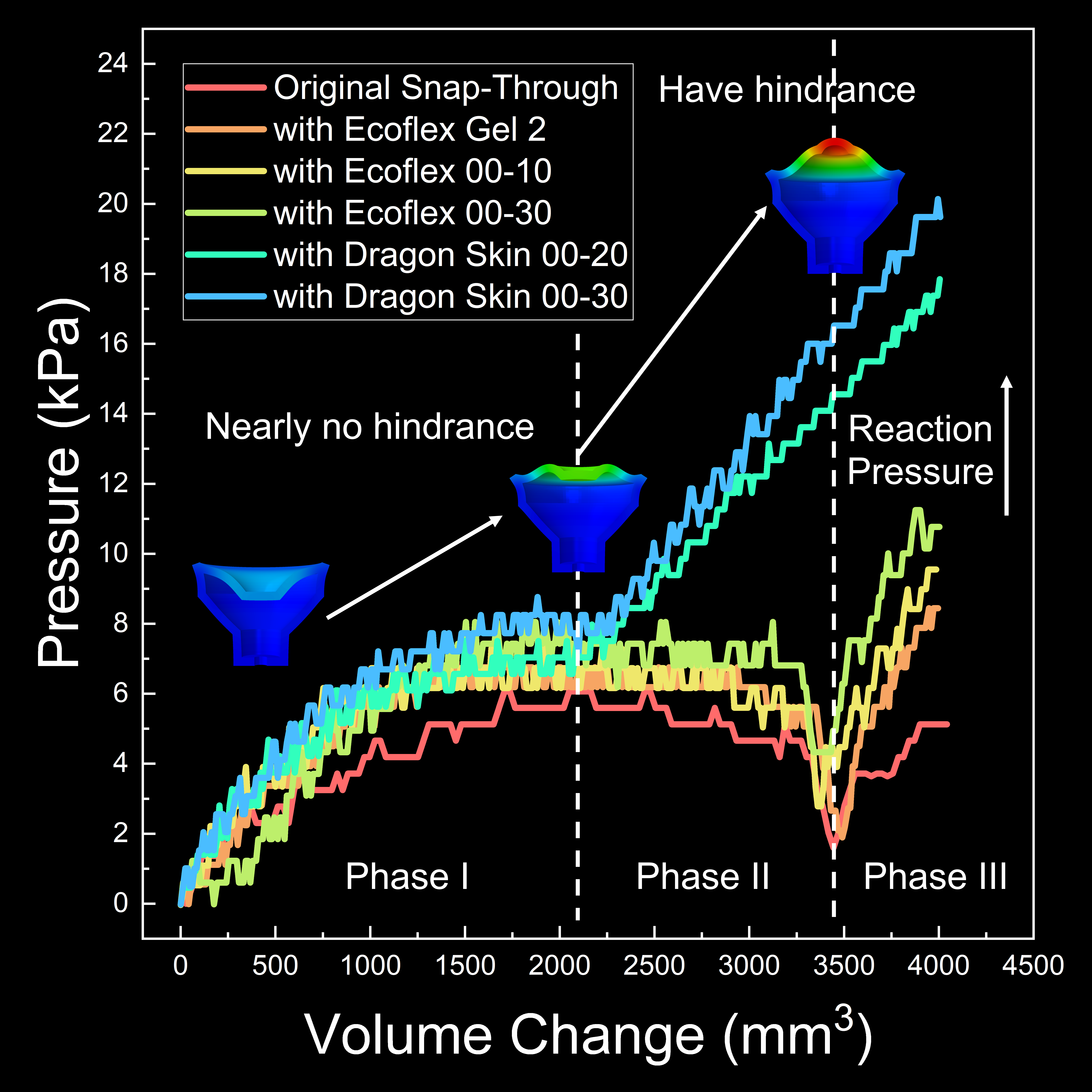
Figure 7: Quasi-static mechanical response of the gripping chamber with and without obstruction, illustrating the three phases of snap-through.
Theoretical Analysis of Stiffness Adaptation
The stiffness-adaptive mechanism is elucidated via an Euler–Bernoulli beam model for the clamping fixture. The hydraulic pressure generated by chamber inflation produces a concentrated load on the beam, whose deflection is a function of both the beam's and the object's stiffness. The effective compliance and equivalent stiffness of the system determine the coupling between chamber pressure and gripping force. For objects with higher stiffness, the beam deflection is restricted, resulting in higher internal pressure and greater gripping force. The system thus passively adapts its output force to the mechanical properties of the grasped object.
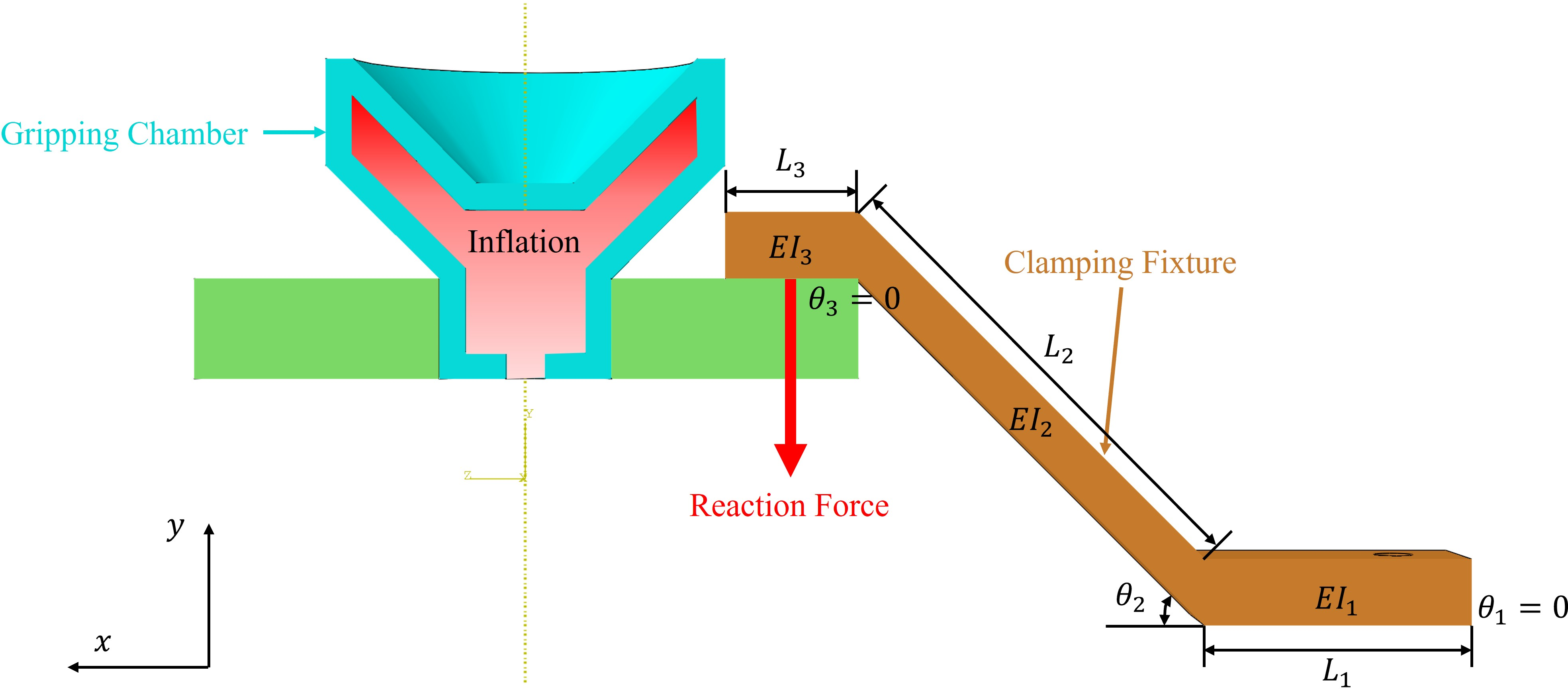
Figure 8: Schematic of the single-sided gripper module setup, showing force transmission through the clamping fixture.
Proof-of-concept grasping experiments were conducted with objects of varying size and stiffness, divided into small-size (2–4 cm) and large-size (8–10 cm) groups. The gripper demonstrated reliable grasping and lifting of both stiff and soft objects, with the internal hydraulic pressure passively adjusting to object rigidity. For stiff objects, the response pressure was ∼6 kPa, while for deformable objects, it was lower, preventing damage to fragile items. The snap-through and grasping response typically occurred within one second.
(Figure 9)
Figure 9: Objects grasped and corresponding reaction hydraulic pressures for small and large size groups, demonstrating size-selective and stiffness-adaptive behavior.
Implications and Future Directions
The source-free bistable fluidic gripper architecture offers several practical advantages:
- Portability and Autonomy: Elimination of external pumps enables compact, untethered operation suitable for underwater and field robotics.
- Energy Efficiency: Bistable snap-through design allows shape retention without continuous energy input, reducing power requirements.
- Size Selectivity: Fixed-distance configuration enables targeted sampling and manipulation, filtering objects outside the desired size range.
- Stiffness Adaptation: Passive hydraulic feedback allows the gripper to modulate gripping force according to object stiffness, enhancing versatility and safety.
Theoretical modeling and experimental validation confirm the robustness of the bistable mechanism and its adaptability. Future work may focus on miniaturization, integration with onboard sensing and control, and extension to multi-fingered or multi-modal grippers. The architecture is well-suited for autonomous sampling, manipulation in hazardous or remote environments, and applications requiring low-power, adaptive soft robotics.
Conclusion
The paper presents a comprehensive design, simulation, and experimental validation of a source-free bistable fluidic gripper capable of size-selective and stiffness-adaptive grasping. The integration of bistable snap-through chambers in a closed hydraulic circuit enables autonomous, energy-efficient operation without external actuation sources. The gripper demonstrates reliable performance across a range of object sizes and stiffnesses, with passive adaptation of gripping force. This approach has significant implications for the development of portable, autonomous soft robotic manipulators for underwater, field, and mobile applications.