- The paper presents a new tendon-driven musculoskeletal arm using DDILC to achieve high trajectory tracking accuracy in dynamic environments.
- It details the integration of Hill-type muscle models and a modularized artificial muscular system within a seven DOF robotic architecture.
- Experimental and simulation results demonstrate robust interference resistance and superior error reduction compared to traditional controllers.
Robustness Study of Bio-Inspired Musculoskeletal Arm Robot
Introduction
The paper "Robustness study of the bio-inspired musculoskeletal arm robot based on the data-driven iterative learning algorithm" (2511.05995) presents a thorough examination of a newly designed lightweight tendon-driven musculoskeletal arm (LTDM-Arm), aimed at emulating human arm capabilities such as dexterity, compliance, and robustness in unstructured environments. The LTDM-Arm features a seven degree-of-freedom (DOF) skeletal joint system paired with a modularized artificial muscular system (MAMS) comprising 15 actuators. A data-driven iterative learning control (DDILC) approach is employed to optimize activation signals for repetitive tasks, overcoming the limitations posed by nonlinear dynamics and the lack of proprioceptive feedback.
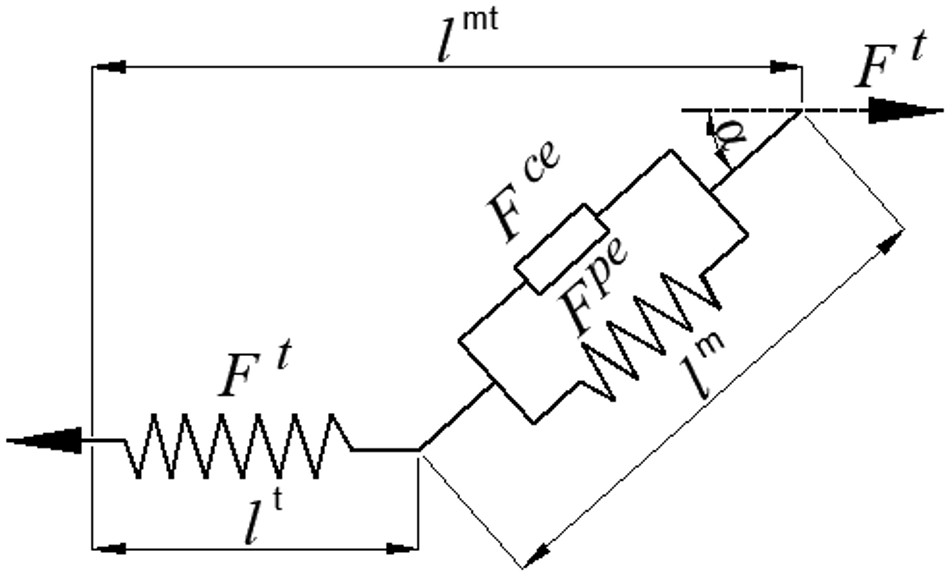
Figure 1: Hill-type muscle model description.
This study contributes significantly to the development of robotic systems capable of human-like operational performance. The primary focus is on structural aspects, control strategies, and robustness testing against interference, incorporating the Hill-type muscle model known for its biological fidelity and computational efficiency.
Musculoskeletal Model and System Design
Architecture of the Musculoskeletal Model
The LTDM-Arm employs Hill-type muscle models, incorporating contraction elements, parallel elastic elements, and series elastic elements. These components simulate the internal driving mechanism of artificial muscles based on muscle activation kinetics, tension production, and muscle-tendon contraction dynamics. The models prioritize computational efficiency alongside biomechanical completeness.
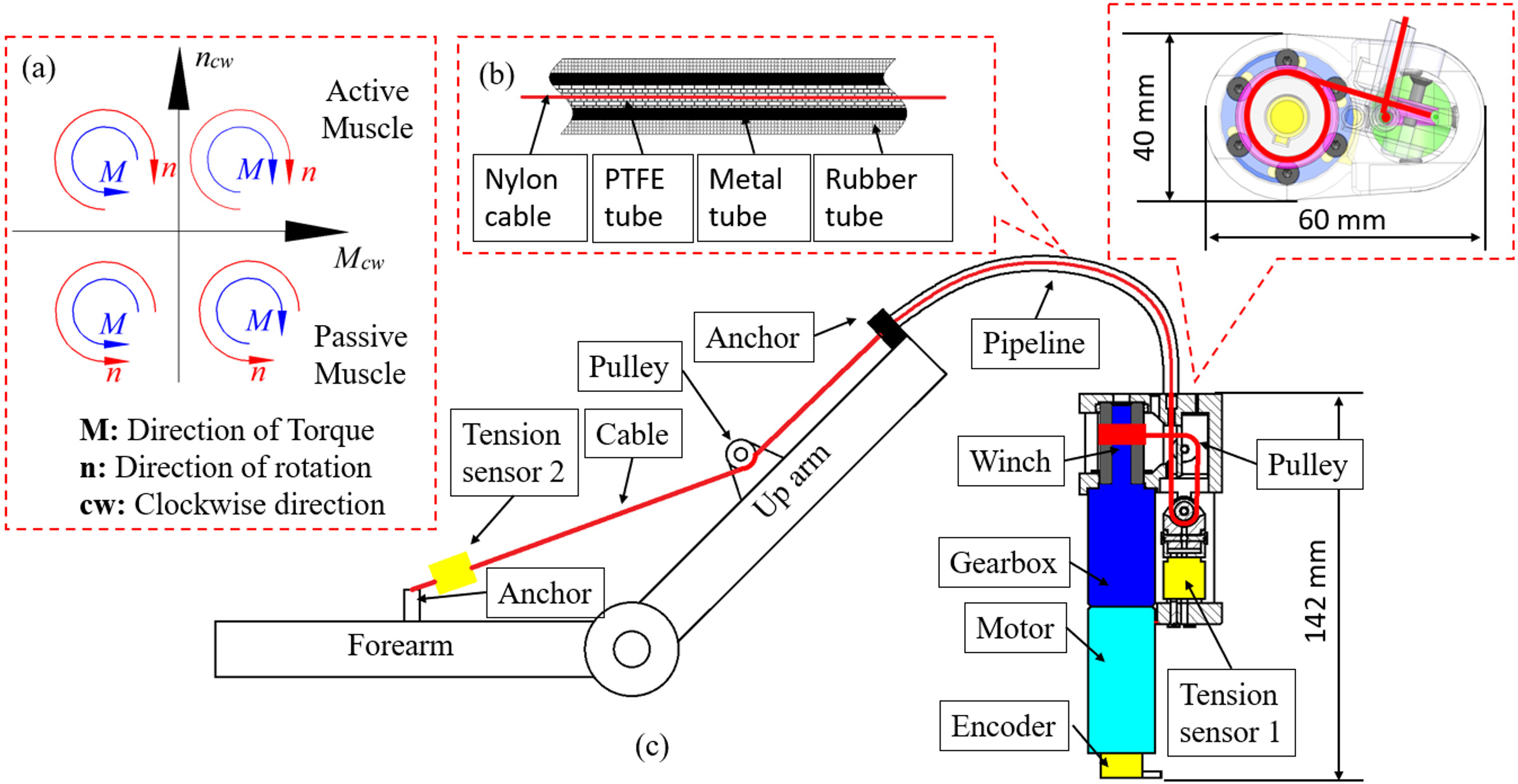
Figure 2: Modularized artificial muscular system (MAMS) scheme: (a) Quadrant diagram of DC motor motion states; (b) Schematic diagram of tube-rope transmission; (c) Schematic diagram of single-joint muscle-driven principle.
LTDM-Arm Design
The LTDM-Arm is structured to mirror human anatomy, incorporating shoulder, elbow, forearm, and wrist components, with each degree of freedom controlled by antagonistic muscle pairs. This design facilitates variability in joint stiffness and supports both fine and explosive tasks. The system benefits from a highly flexible and scalable design, making it apt for diverse applications in robotics.
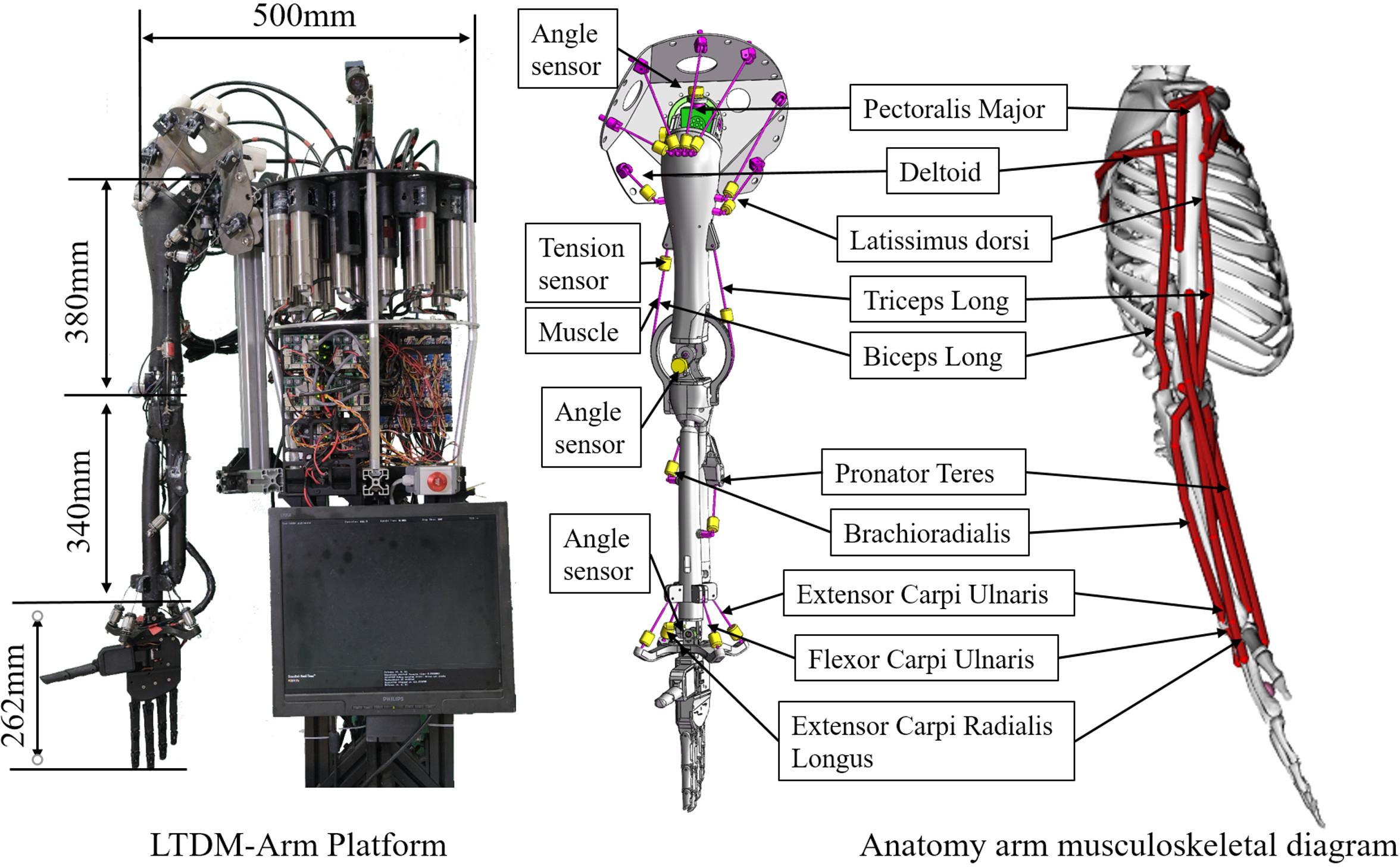
Figure 3: (Color online) LTDM-Arm design scheme.
Control Strategies: DDILC Algorithm
Iterative Learning Control Approach
The DDILC algorithm addresses control challenges arising from complex musculoskeletal configurations and nonlinearity. It promotes efficient learning and refinement of activation signals through repetition and correction. The approach integrates bias-format feedback control along the time axis with feedforward control along the iteration axis, ensuring robust performance.
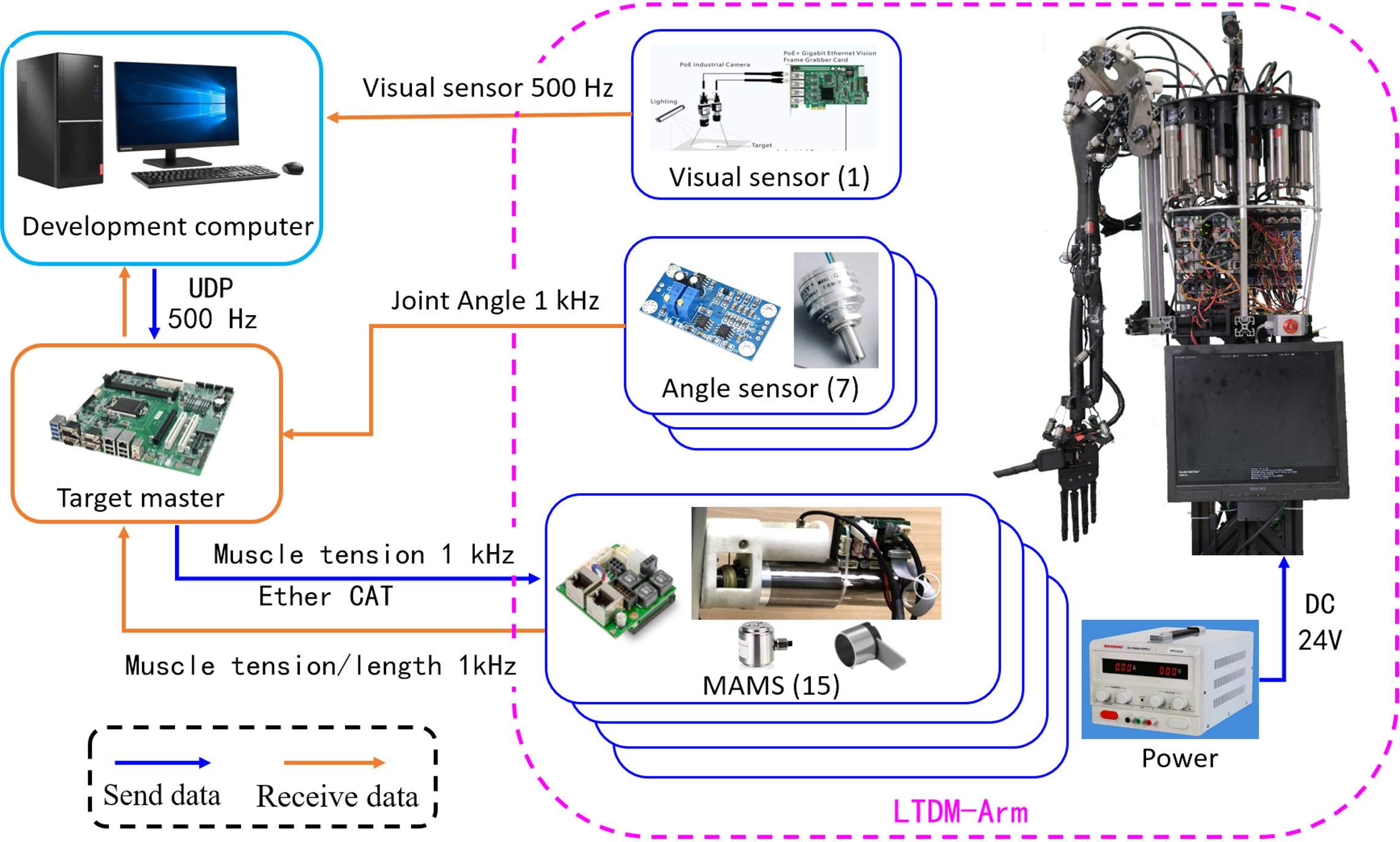
Figure 4: The circuit architecture of LTDM-Arm.
Experimental Results
Numerical Simulations
Numerical simulations highlight the efficacy of the DDILC algorithm in achieving high trajectory tracking accuracy. Compared to traditional methods like CMC and Nonlinear-PID, DDILC exhibits superior error reduction, particularly in complex trajectory scenarios.
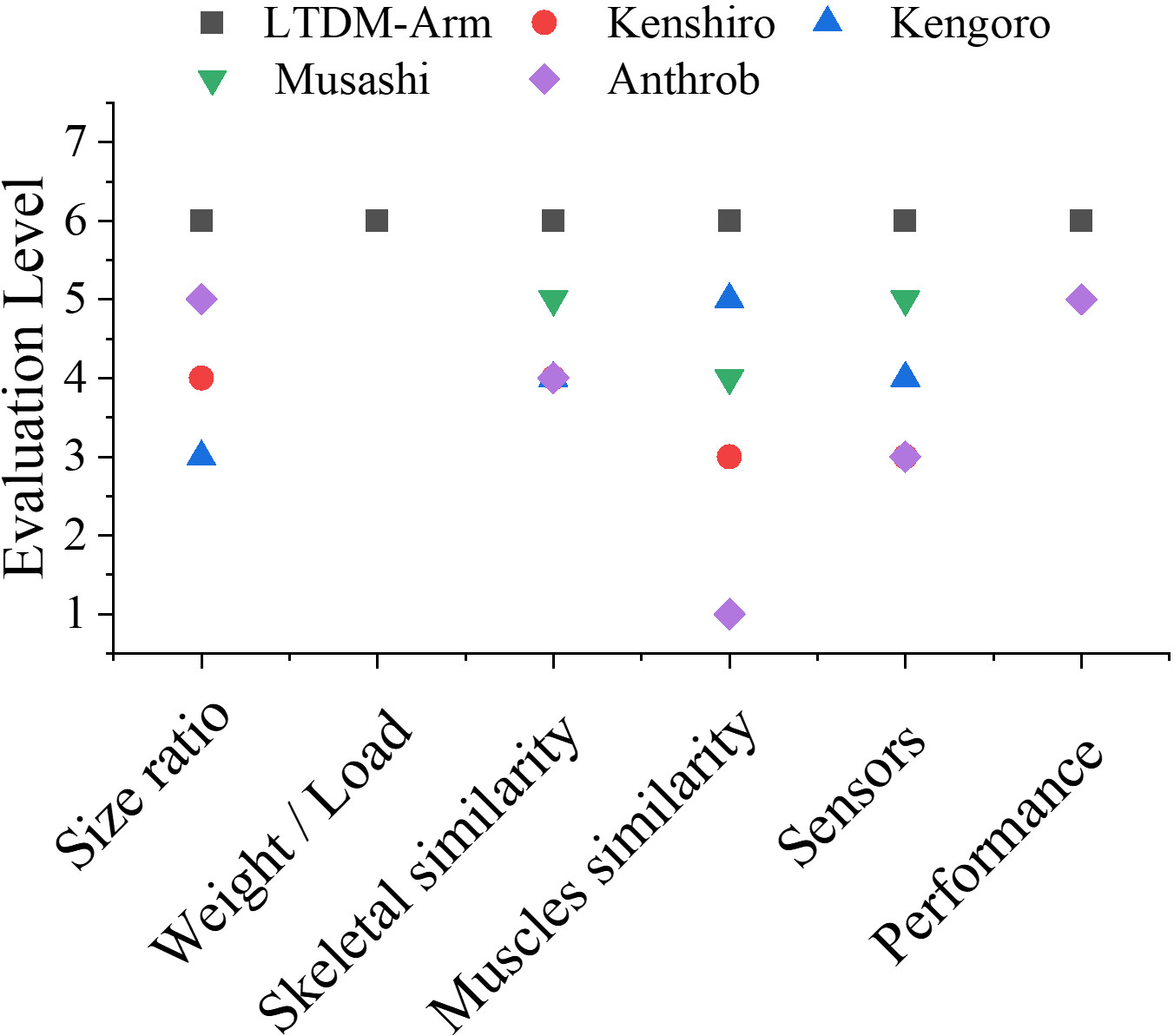
Figure 5: Performance comparison results of LTDM-Arm with other similar devices.
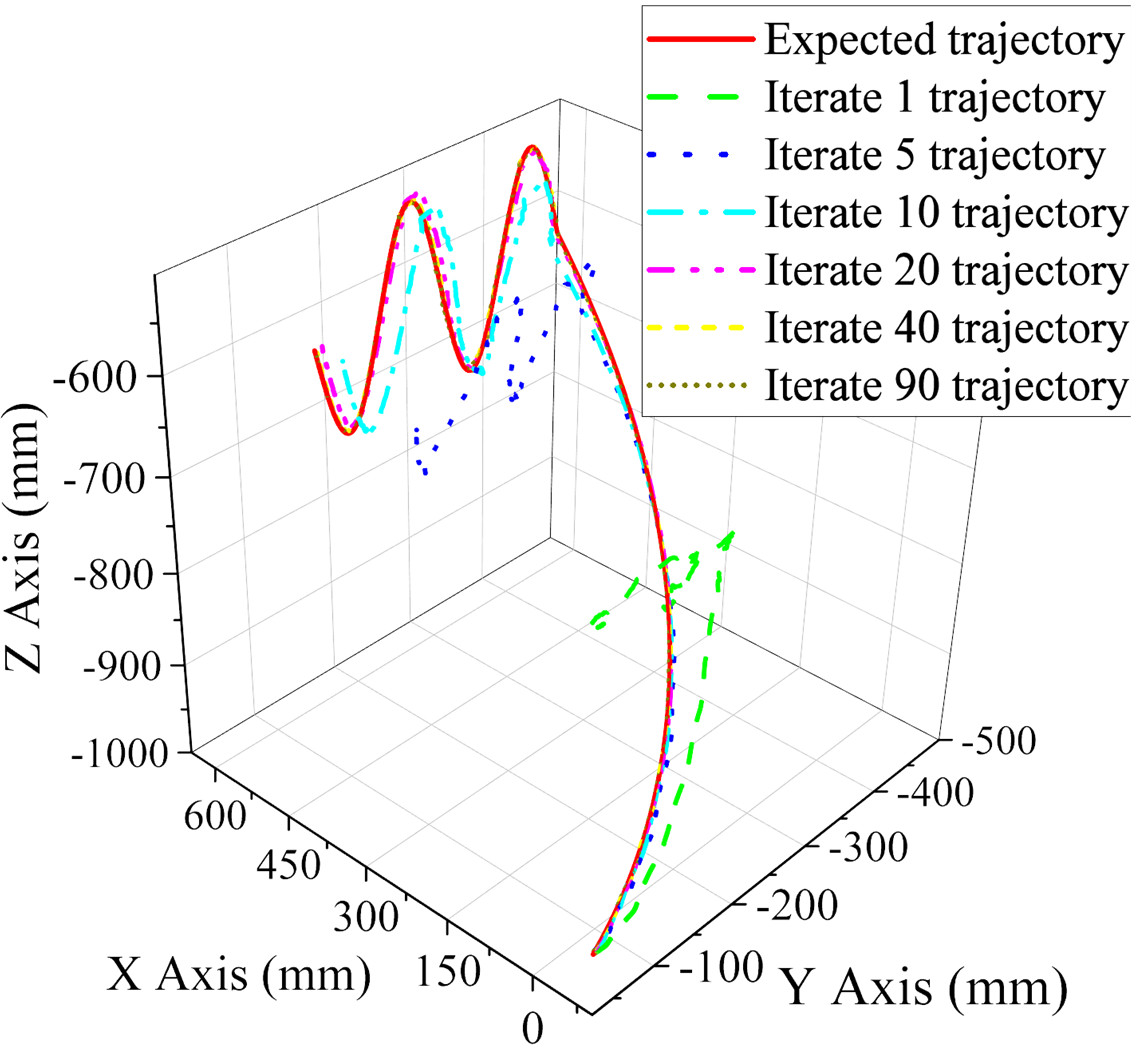
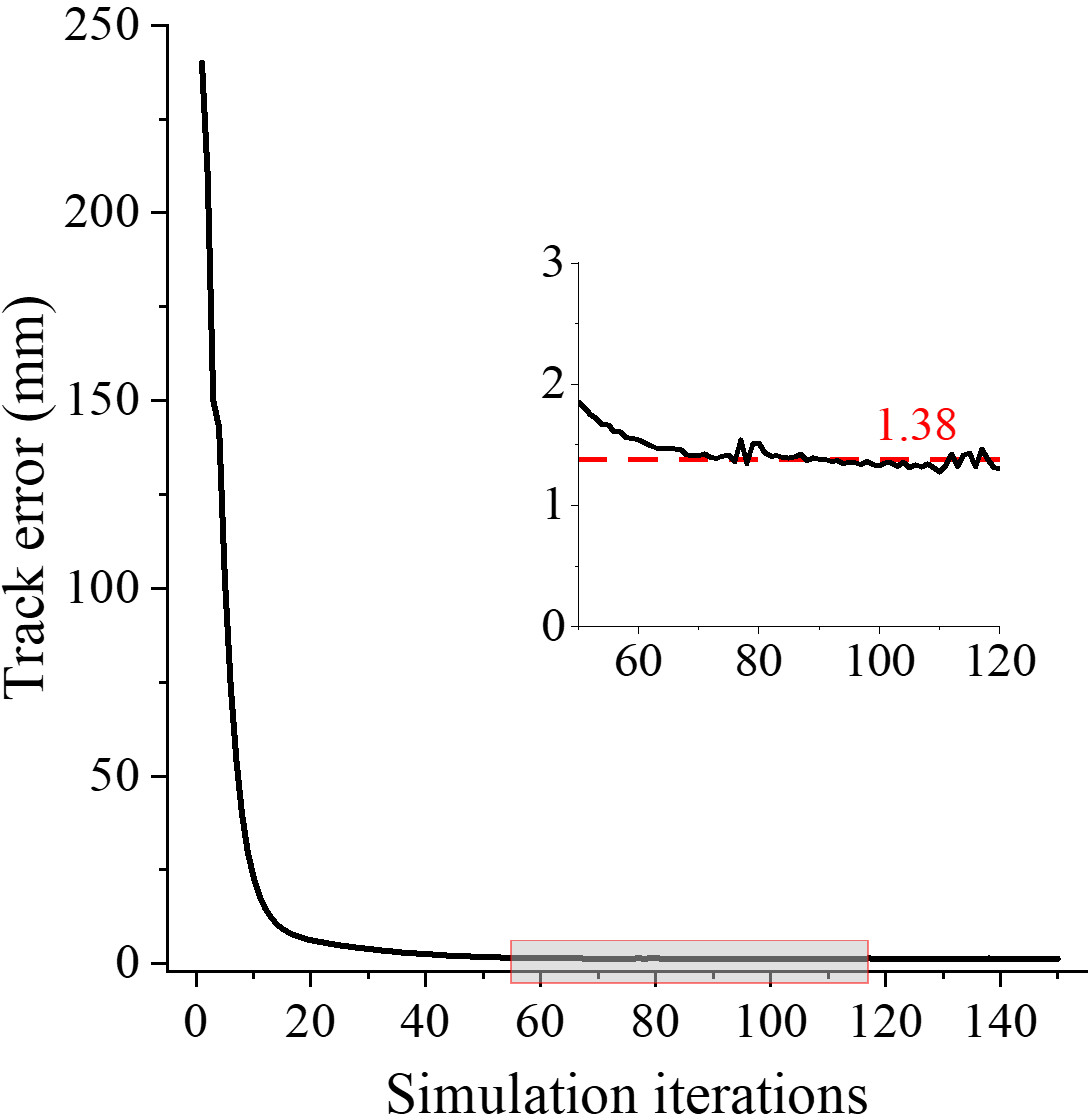
Figure 6: Trajectory and error results of DDILC numerical simulation.
Prototype Experiments
Experiments with the LTDM-Arm prototype validate the DDILC's effectiveness in real-world scenarios, adjusting for hardware-induced uncertainties, friction, and manufacturing variances. The algorithm consistently reduces tracking errors through adaptive learning mechanisms.
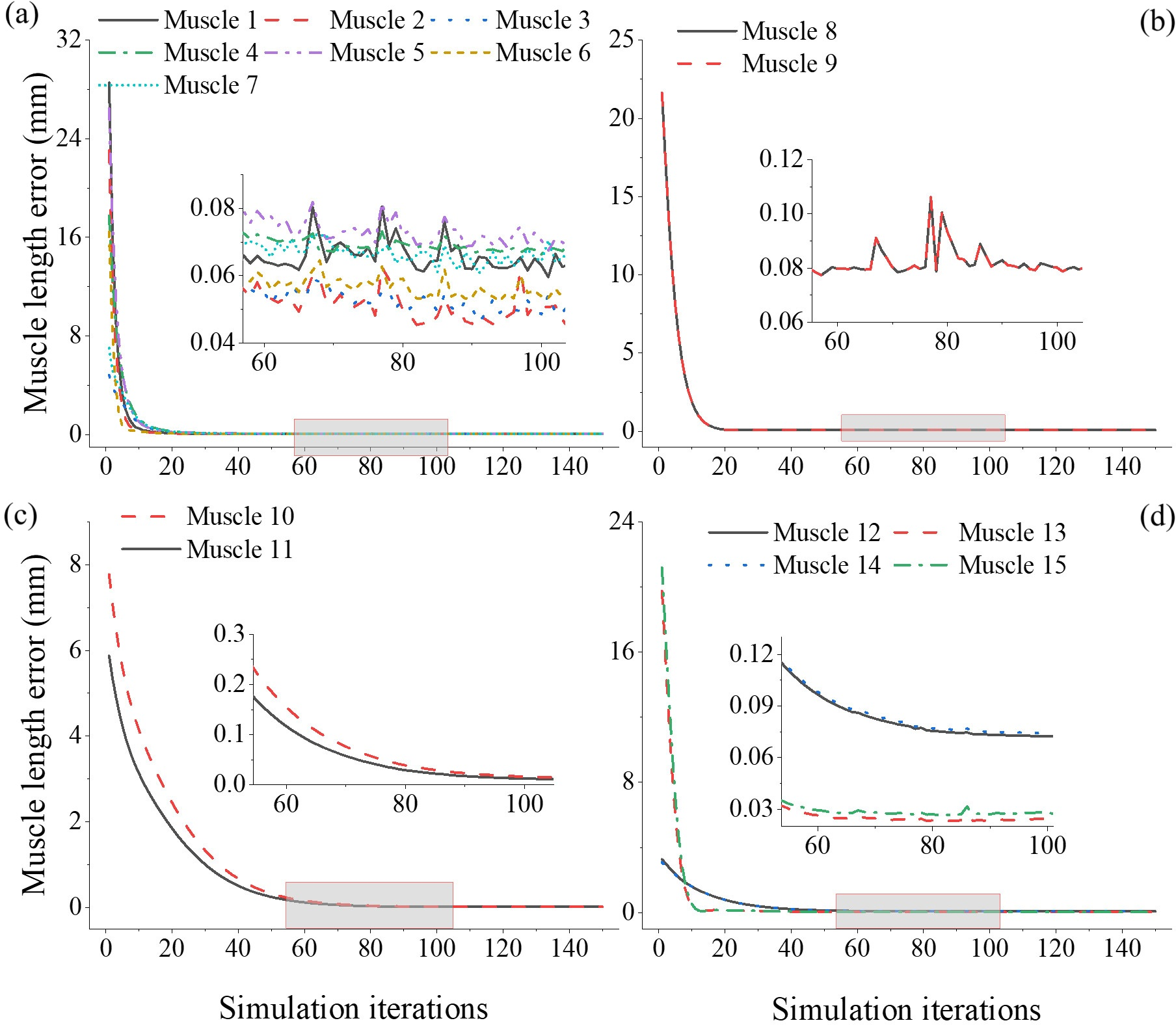
Figure 7: Simulation muscle length error results: (a) Shoulder joint data; (b) Elbow joint data; (c) Forearm joint data; (d) Wrist joint data.
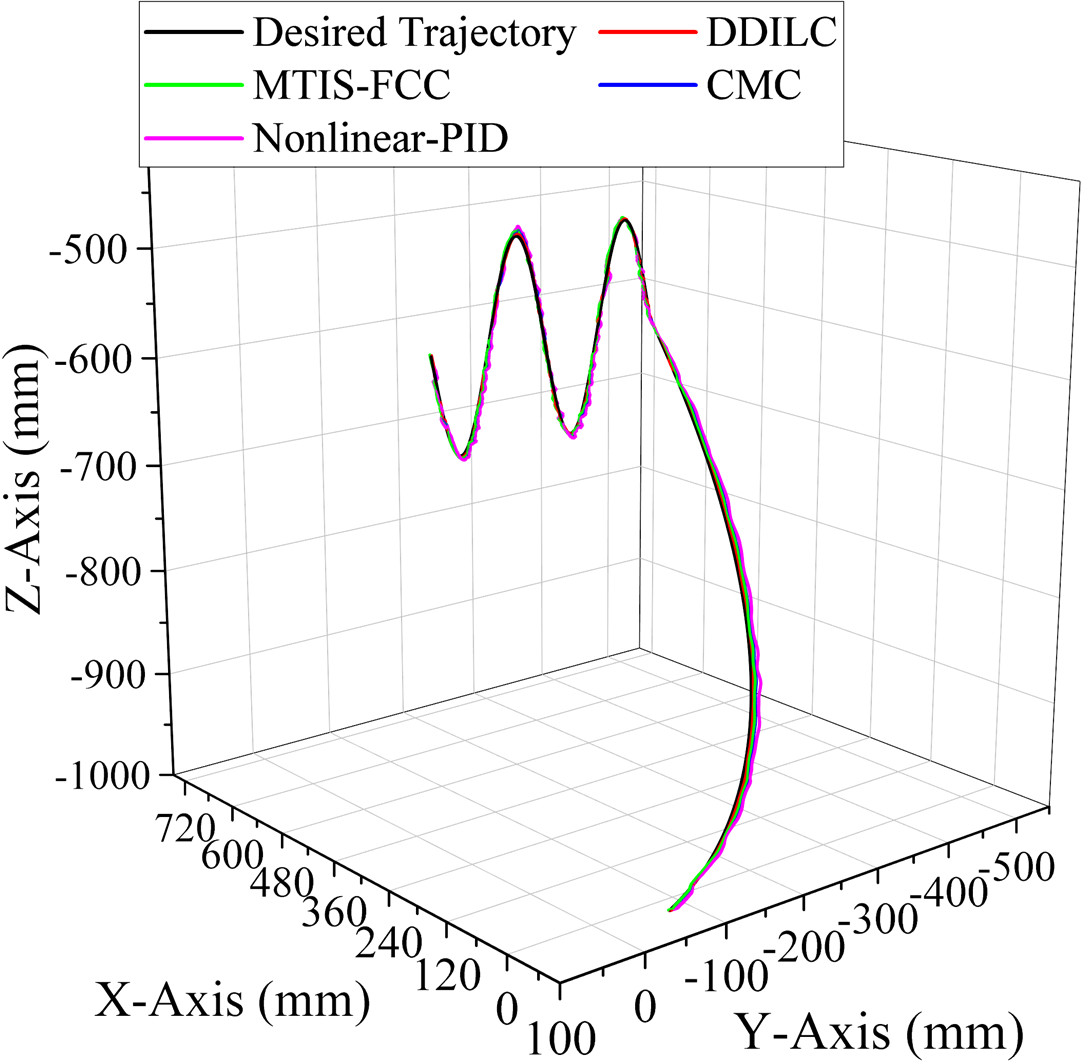
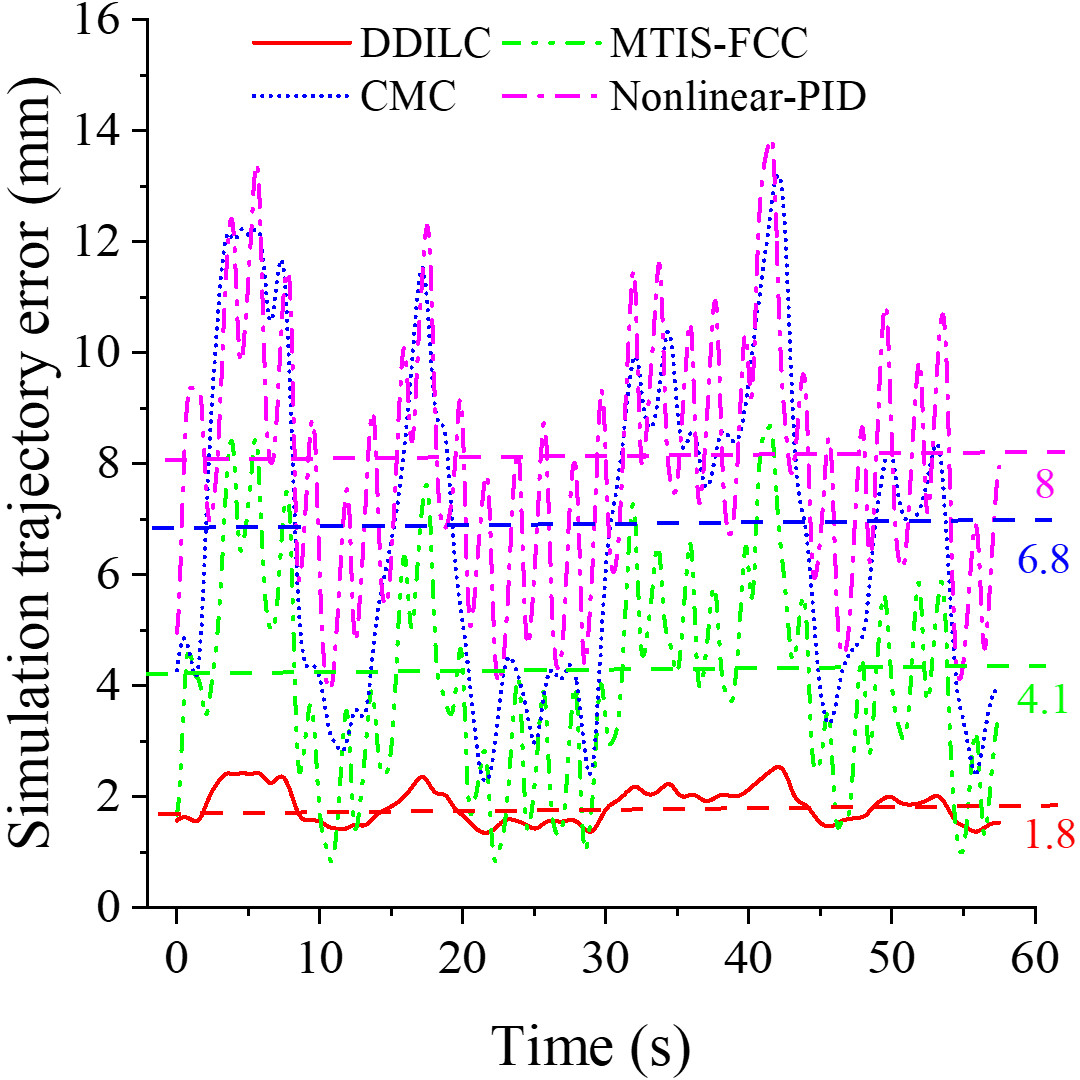
Figure 8: Comparison of simulation results of DDILC and CMC of LTDM-Arm.
Interference Resistance Evaluation
Both simulations and real-world experiments demonstrate the LTDM-Arm's strong resistance to external load disturbances, attributed to the unique muscle-driven control mechanism and DDILC's iterative learning efficiency.
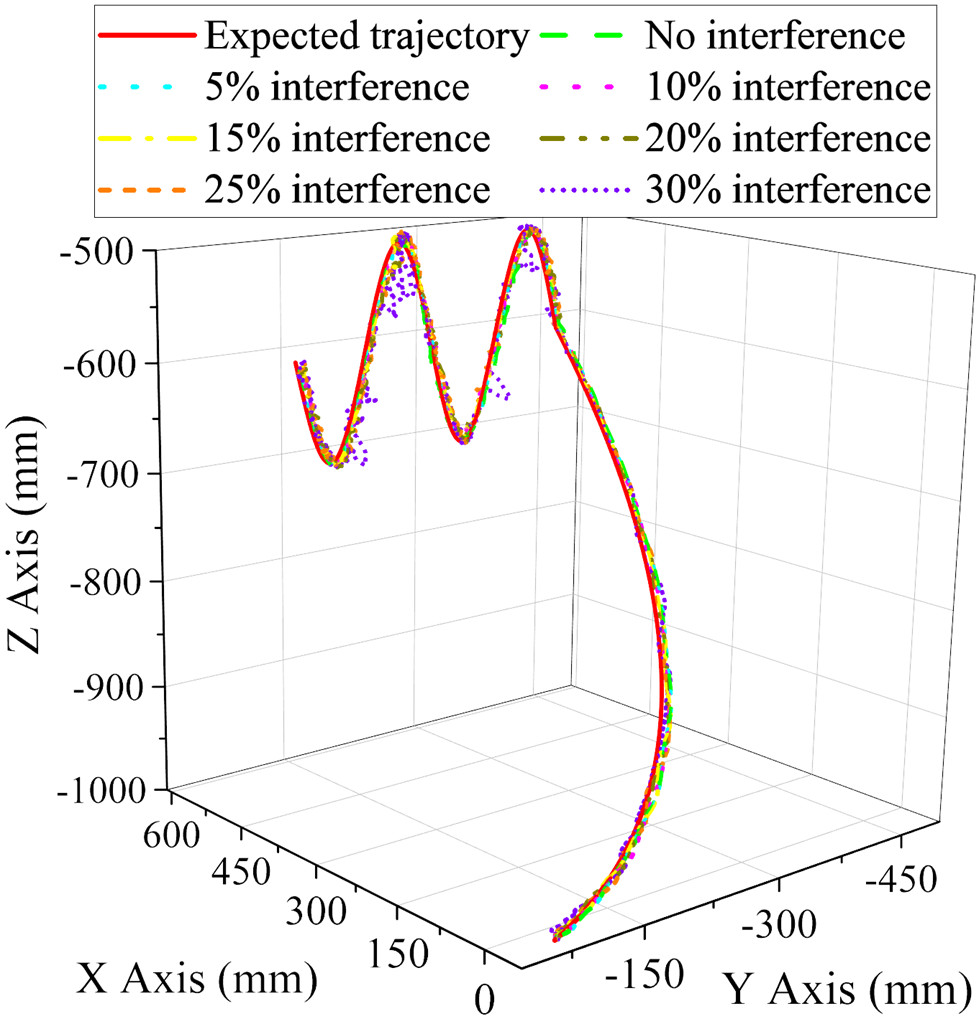
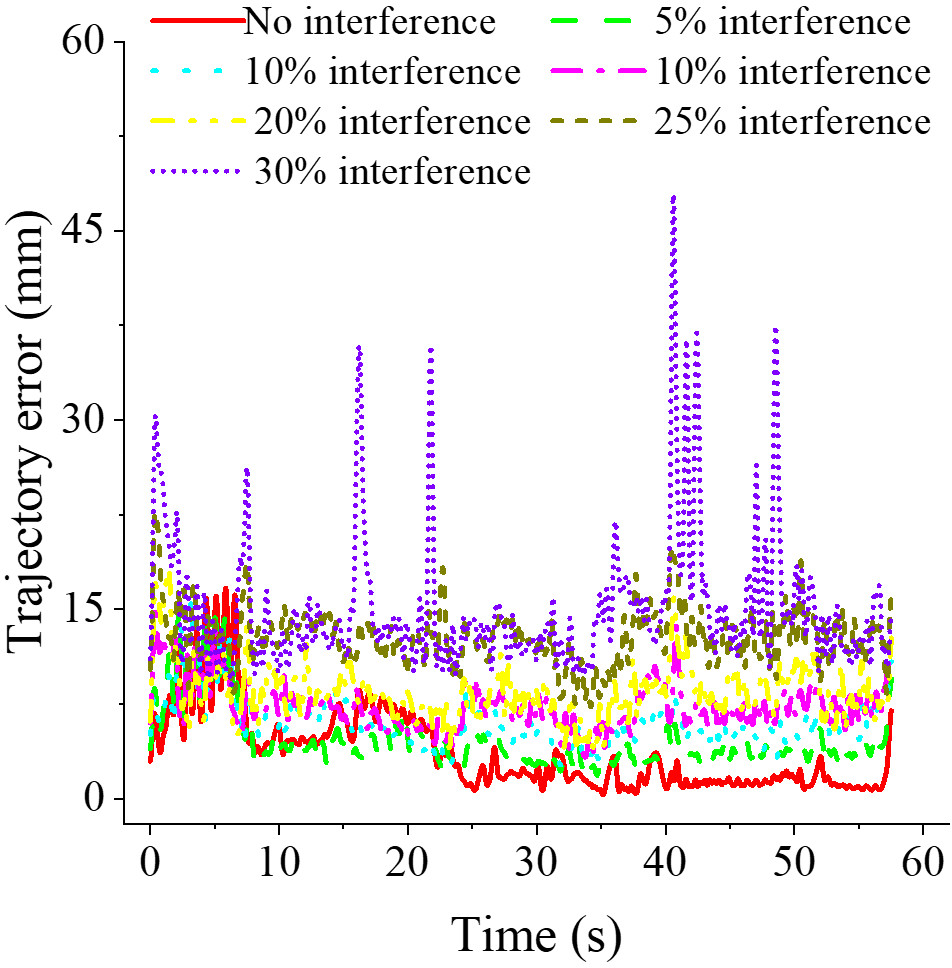
Figure 9: Numerical Simulation Results for Interference Resistance.
Conclusion
The LTDM-Arm's innovative design and control strategies underscore its potential in developing next-generation robotic systems for unstructured environments. The DDILC methodology provides compelling enhancements in trajectory tracking precision and robustness against interference. Future work will explore integrating multi-sensor feedback for autonomous task execution, focusing on human-computer interaction safety and stability.
This comprehensive robustness study lays the groundwork for advancements in musculoskeletal robotic systems, potentially transforming their application in repetitive labor tasks across diverse fields.