- The paper presents S²-NNDS, which jointly learns neural dynamics and certificates to achieve safe and stable robot motion plans in obstacle-rich environments.
- It integrates neural Lyapunov and barrier certificate learning with split conformal prediction to provide statistical safety guarantees over large state subsets.
- Experiments demonstrate that S²-NNDS outperforms polynomial-based methods, offering less conservative and more expressive safe areas in complex scenarios.
Safe and Stable Neural Network Dynamical Systems for Robot Motion Planning
Introduction
The paper "Safe and Stable Neural Network Dynamical Systems for Robot Motion Planning" (2511.20593) addresses the longstanding challenges in learning safe and stable robot motion plans from demonstrations, particularly targeting nonlinear, obstacle-rich environments. The authors introduce the S2-NNDS (Safe and Stable Neural Network Dynamical Systems) framework, which advances Learning from Demonstration (LfD) by shifting beyond traditional polynomial dynamical system parameterizations. Instead, they jointly learn expressive neural dynamical systems with neural Lyapunov and barrier certificates, leveraging split conformal prediction for statistical safety and stability guarantees. This approach promises formal confidence in both safety and stability while circumventing limitations of previous sum-of-squares (SOS) techniques and enabling generalization to environments with arbitrary obstacle geometry.
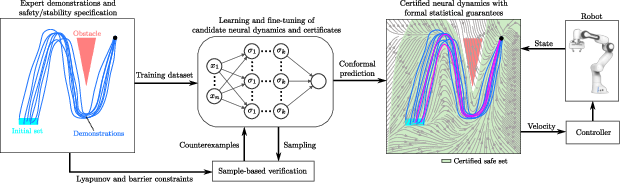
Figure 1: Overview of S2-NNDS—joint learning of neural dynamics and certificates with statistical guarantees via conformal prediction.
The core motion planning challenge is cast as a dynamical system (DS) identification task, modeling robot motion as:
x˙(t)=f(x(t))
where f is a nonlinear, continuous velocity field inferred from demonstration data. The learning objective combines trajectory imitation (minimizing MSE between demonstrated and simulated velocities) with formal certificate constraints: Lyapunov functions for stability and barrier functions for static obstacle avoidance. These constraints result in an intractable infinite-dimensional optimization, historically addressed using polynomial DS and certificates. However, polynomial parameterizations restrict expressivity and are computationally challenging for complex tasks.
By parameterizing f, V (Lyapunov), and B (barrier) as neural networks, S2-NNDS exploits universal approximation while extending certification to highly nonlinear, real-world scenarios. Neural network architectures and constraint-enforcing losses are constructed to guarantee the certificate properties over large sampled subsets of the state space.
Algorithmic Framework
Neural Parameterization and Training
fθ, Vθ′, and Bθ′′ are implemented as fully-connected neural networks with carefully selected activation functions and architectural constraints to enforce properties such as fθ(0)=0 and Vθ′(0)=0. Training proceeds in two phases:
- Imitation Phase: fθ is trained to fit demonstrations via MSE.
- Joint Certificate Learning: fθ, Vθ′, and Bθ′′ are jointly optimized using composite loss functions, including hinge-like losses penalizing violations of Lyapunov and barrier constraints on large sampled state sets.
A counterexample-guided refinement loop iteratively augments the training set with states where constraints are violated, improving certificate tightness and reliability.
Recognizing the limits of empirical sample-based certificate verification, the authors incorporate split conformal prediction to provide PAC-like statistical guarantees. Nonconformity scores aggregate violation magnitudes of all constraints, yielding quantiles that probabilistically bound failure rates. Theoretical results formalize this with explicit confidence bounds, e.g., p≤0 implies constraints hold over at least (1−ϵ) fraction of the domain with (1−β) confidence.
Experimental Evaluation
Comprehensive experiments validate S2-NNDS in both simulated benchmarks and real robot setups.
LASA Handwriting and 3D Datasets
On 8 LASA handwriting datasets and 3D C-shaped movements, neural dynamical systems are trained and certified to avoid obstacles of arbitrary geometry, including non-semi-algebraic sets. Learned trajectories closely resemble the demonstrations while fitting safe sets tightly between obstacles, demonstrating non-conservatism in certificate synthesis.
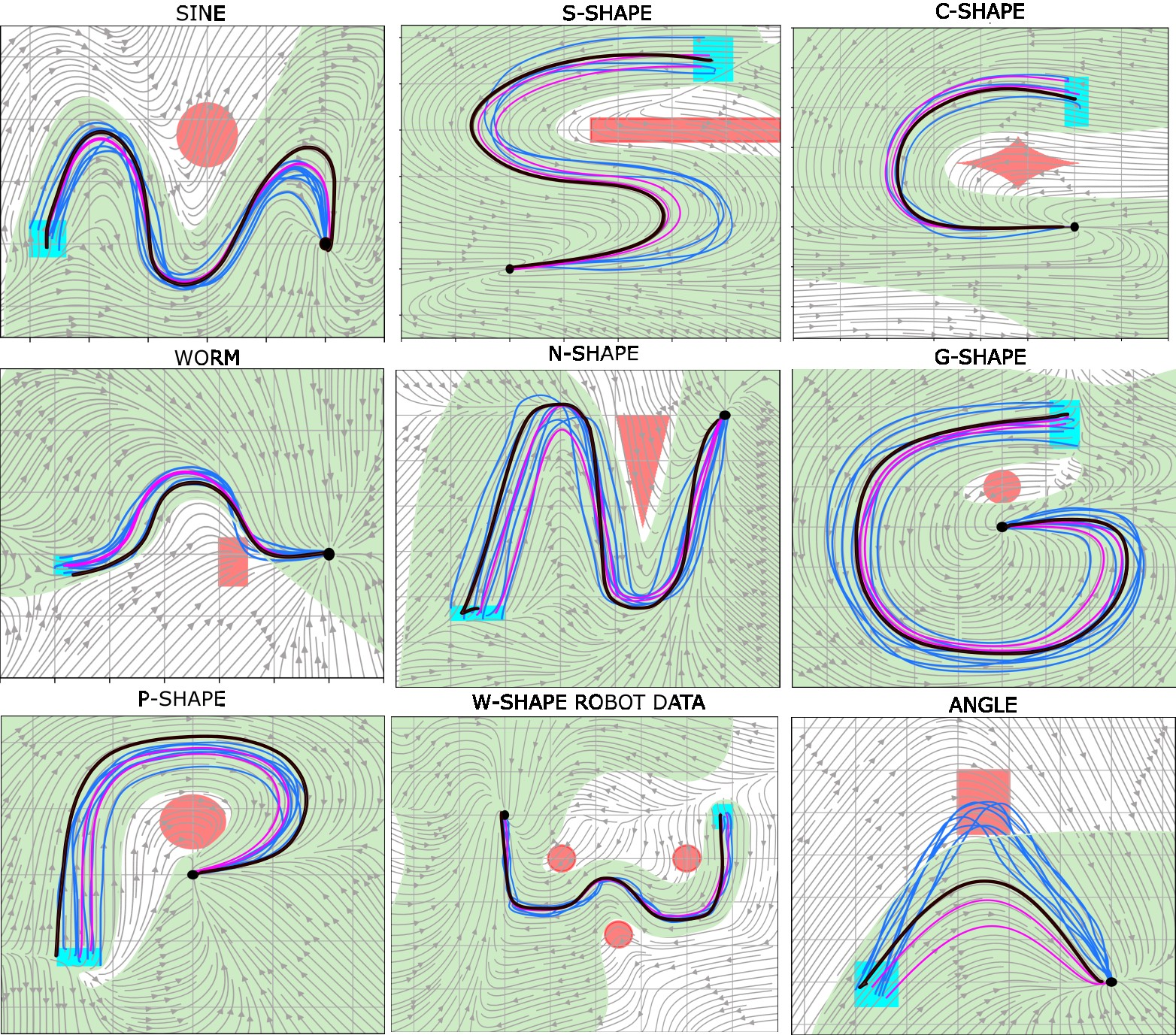
Figure 2: Neural DS trajectories and barrier functions for LASA handwriting and robot demonstrations in obstacle environments.
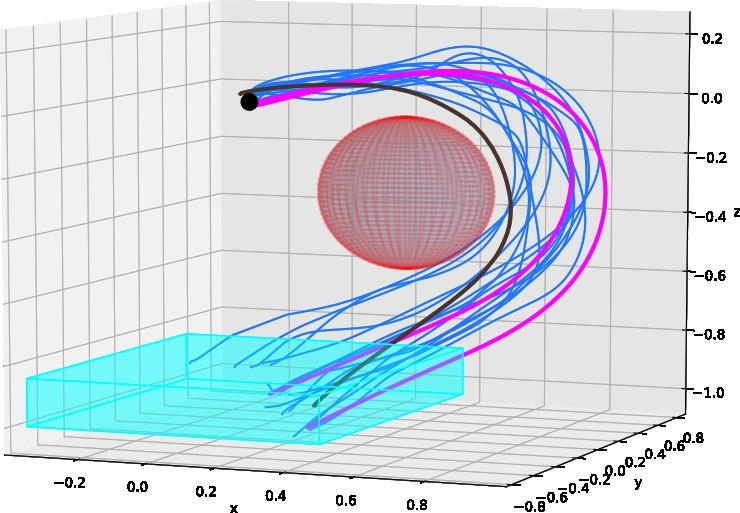
Figure 3: Neural DS trajectories for 3D C-shaped motion, illustrating safe and stable behavior in higher dimensions with increased sample requirements.
Benchmark Comparisons
The proposed method is compared with ABC-DS, an SOS-based polynomial DS learning algorithm. S2-NNDS achieves competitive or superior MSE and DTW alignment scores, particularly in cases with highly nonlinear demonstration shapes or non-convex obstacle configurations that confound polynomial approaches. S2-NNDS provides less conservative certificates (larger safe areas) and robust performance even with unsafe demonstrations, where ABC-DS often fails.
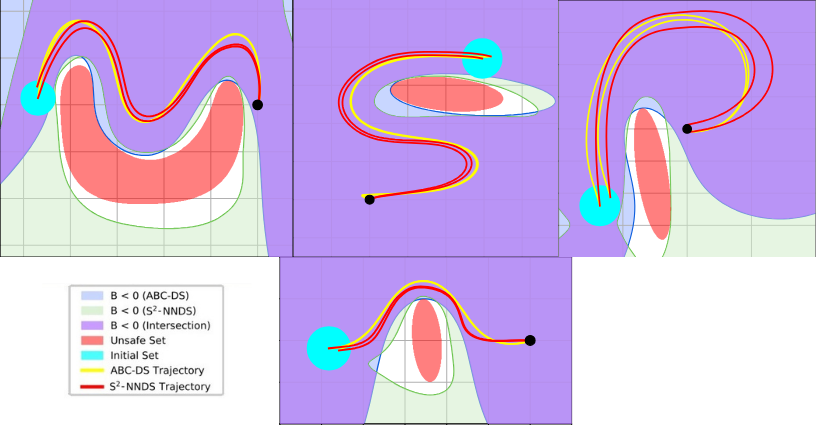
Figure 4: Comparison of learned trajectories and barrier functions between S2-NNDS and ABC-DS, highlighting tighter, less conservative certificates in S2-NNDS.
Real Robot Demonstrations
Kinesthetic demonstrations from the Franka Panda robot are used to train S2-NNDS models, successfully generating safe robot motion in the presence of multiple obstacles. Deployment on a drawing platform demonstrates the practical viability of the learned neural DS and certificates.
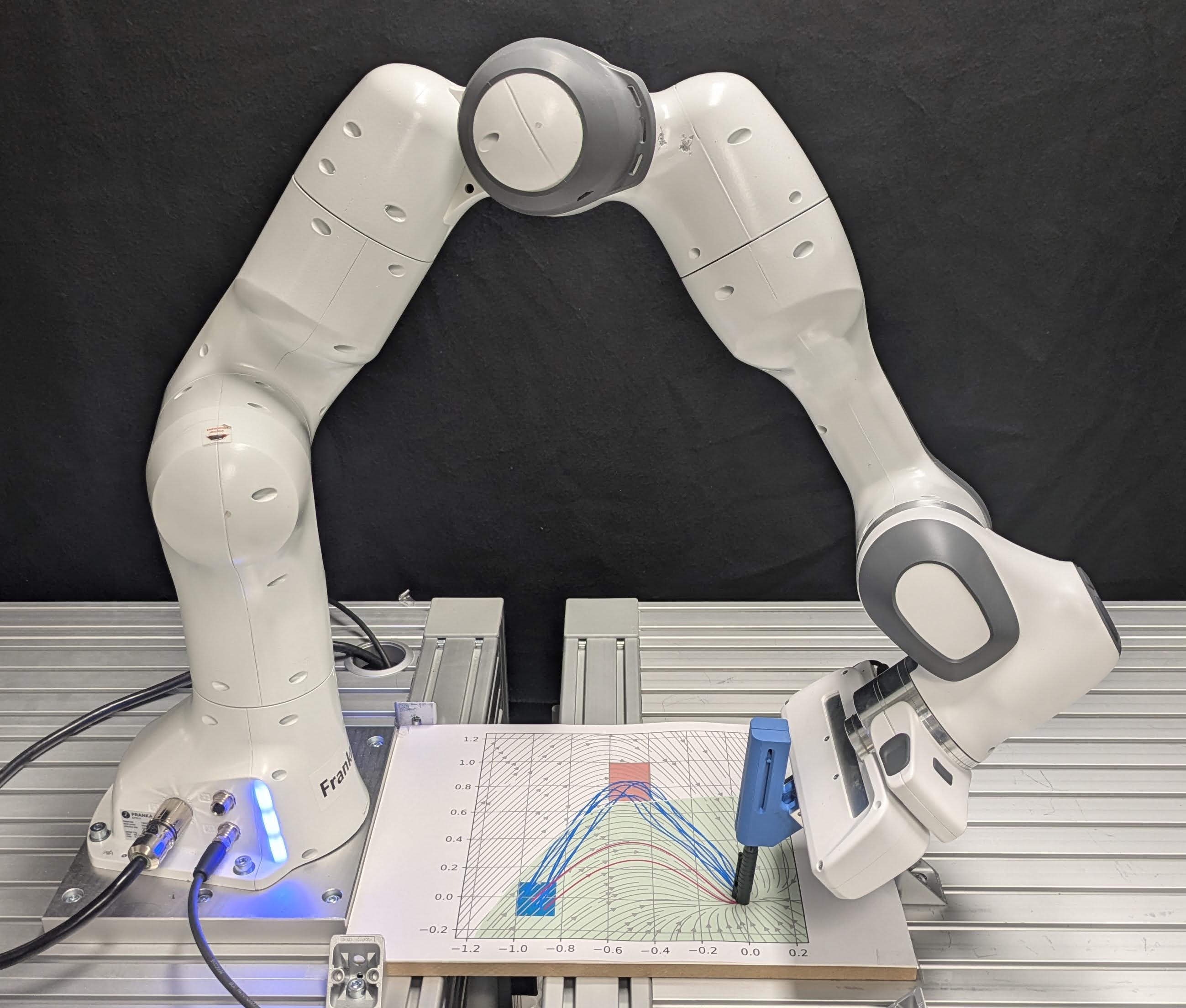
Figure 5: Franka Panda Robot drawing platform used for real-world validation of the learned neural dynamical systems.
Generalization in Cluttered Environments
S2-NNDS successfully solves cases such as sine-shaped trajectories in cluttered environments where ABC-DS’s reliance on semi-algebraic approximations leads to infeasibility.
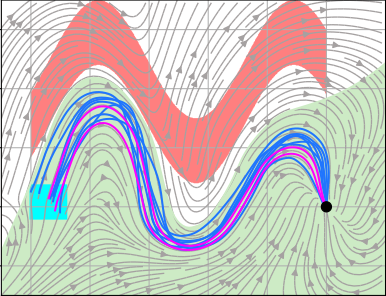
Figure 6: S2-NNDS trajectory for a sine-like motion avoiding complex obstacles; ABC-DS fails due to barrier infeasibility.
Discussion and Implications
S2-NNDS achieves safe and stable imitation from demonstrations with formal statistical guarantees, outperforming polynomial/SOS methods in expressivity and obstacle handling. However, neural certificates are only locally valid within bounded domains, not providing global asymptotic stability as polynomial methods theoretically can. The approach is restricted to static obstacle scenarios due to the offline nature of certificate synthesis; adaptation to dynamic obstacles would require online learning or certificate modulation, which undermines formal guarantees and real-time feasibility.
Sensitivity to neural hyperparameters and initial dynamics training can affect solution quality, and further enhancements—such as region-of-attraction estimation or dynamic obstacle extension—are fertile areas for future research.
Conclusion
S2-NNDS presents a robust framework for safe and stable robot motion planning via neural dynamical systems and certificates. By fusing neural universal approximation with sample-efficient, formal statistical guarantees using conformal prediction, it extends LfD to complex, nonlinear, and cluttered spaces previously unreachable by polynomial-based approaches. While local in scope and limited to static obstacle environments, S2-NNDS sets a new technical baseline for safe robot motion learning and opens avenues for further theoretical and algorithmic development in neural certificate synthesis and verification.