- The paper demonstrates that conventional inertia emulation in grid-forming converters is suboptimal, as low droop and low virtual inertia markedly enhance damping performance.
- The study employs state-space modeling and eigenmode analysis to quantify trade-offs in frequency regulation between governor-controlled synchronous generators and GFM converters.
- The findings challenge legacy grid-code designs by advocating for decentralized, low-inertia control strategies to optimize dynamic performance in power-electronic grids.
Introduction
This paper presents a rigorous modal analysis of the inertial and damping characteristics of governor-controlled synchronous generators (GC-SGs) and droop-based grid-forming (GFM) converters, critically assessing the industry-standard approach of emulating legacy synchronous generator dynamics within inverter-based resources (IBRs). The analysis systematically demonstrates that the structural differences between conventional synchronous machines and droop-based power-electronic GFMs invalidate the classical trade-offs between inertia, damping, and frequency regulation that underpin contemporary grid-code requirements. The main implication is that high inertia and large droop, long considered markers of robust system dynamics, can be highly suboptimal for power-electronics-dominated grids.
Methodological Framework
The study employs state-space modeling and eigenmode analysis to isolate and investigate electromechanical dynamics within simplified microgrid configurations. For GC-SGs, the model explicitly includes rotor angle and frequency dynamics, governor and turbine time constants, and the impact of primary droop regulation, neglecting stator transients and auxiliary stabilizers to highlight core mechanical-electrical interactions. For PE-based GFM converters, the emulation of inertia and damping is parameterized directly via droop and virtual inertia constants, with control loops presumed ideal and instantaneous due to the decoupled nature of power electronics.
A sequence of cases is examined: a single-machine system, a prototypical two-machine system coupling a GC-SG and a GFM converter, and progressively tuned scenarios with variable droop and inertia values. Both analytical derivations and small-signal time-domain simulations are employed to verify modal contributions and parametric sensitivities.
Core Findings: Contrasting Inertial Design Principles
Conventional GC-SGs exhibit a fundamental trade-off where adequate turbine-governor mode damping demands large droop constants, inevitably increasing steady-state frequency deviations and thus reliance on secondary regulation. The inertia constant is fixed, and the slow governor time constant further restricts the stability region. These constraints are illustrated analytically and through simulation of a governor-controlled machine feeding a load.
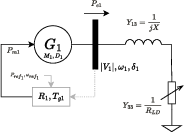

Figure 1: Configuration of a governor-controlled synchronous generator feeding a simplified load.
In stark contrast, droop-based GFM converters invert the classical relationship: decreasing the droop constant simultaneously enhances both frequency regulation and system damping. Virtual inertia can be tuned freely and is not intrinsically coupled to frequency regulation or damping as in GC-SGs.
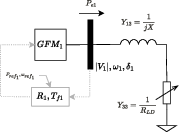
Figure 2: Droop-controlled grid-former feeding a load.
The study provides formal evidence that the current operational paradigm—matching legacy GC-SG inertia and droop in GFM design—prevents exploiting the full dynamic potential of PE-based resources. Analytical results, supported by thorough eigenvalue analysis, demonstrate that simply replacing a GC-SG with a GFM converter configured with matching inertia and droop already yields dramatic improvements in system damping, particularly for the electromechanical swing mode. However, much greater damping improvements are achieved by deliberately choosing much lower virtual inertia and droop in the GFM controller, a result directly contradicting current regulatory trends and grid-code proposals.
Modal Analysis in Multi-Machine Systems
When extended to a two-machine system, the analysis reveals the emergence of three principal dynamics: the inter-machine swing mode, the primary turbine-governor mode, and an internal governor control mode. The oscillatory swing mode, characterized by poor damping when only GC-SGs are present, becomes highly responsive to GFM integration.
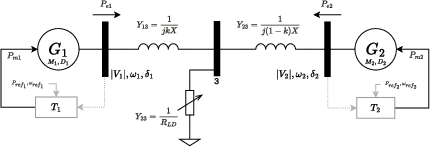
Figure 3: 3-bus system with two droop-controlled generators and a load.
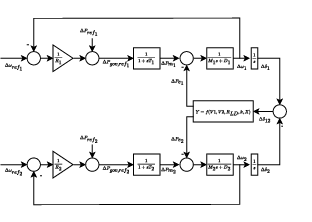
Figure 4: Linear diagram of the 3-bus system.
Modal decomposition illustrates that if a GFM replaces one of two GC-SGs with equivalent conventional settings, the damping ratio of the swing mode improves five-fold. If, instead, the GFM’s virtual inertia is reduced substantially, the swing mode’s damping is dramatically increased and its adverse system impact eliminated. The change in system dynamics is robust, as demonstrated even in asymmetric scenarios and with different load distributions.
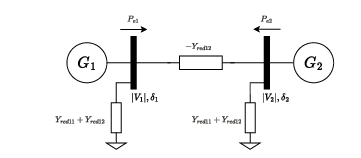
Figure 5: Reduced pi-equivalent of the 3-bus system.
Numerical results substantiate these claims: for instance, reducing GFM virtual inertia achieves swing-mode damping ratio increases from sub-1% (GC-SG only) to nearly 20% without negative impact on frequency stiffness. Time-domain simulations corroborate that response overshoot, settling time, and oscillation decay are all minimized under the low-inertia, low-droop regime.
Revisiting RoCoF and Frequency Nadir
A critical reassessment is given to the use of Rate of Change of Frequency (RoCoF) as an operational metric and protection criterion. The study demonstrates that while lower inertia in GFM-based systems produces higher instantaneous RoCoF during large events, the associated frequency nadir is actually improved, and the overall frequency deviation is tightly bounded. As a result, RoCoF requirements, which are motivating minimum-inertia mandates worldwide, may become obsolete in converter-dominated grids with well-designed GFM controls.
Implications and Future Directions
The theoretical and practical implications of these findings are significant. The results argue strongly for a paradigm shift in GFM converter and grid-code design, away from legacy emulation toward parametric optimization privileging low inertia, low droop, and high damping.
In practical terms, this enables power-electronic resources to independently select inertia and droop constants to optimize system-state trajectories, decouple frequency response and network synchronization, and eliminate the need for power system stabilizers and extensive secondary regulation. Network planning and grid codes must therefore adapt, abandoning rigid inertia-matching protocols and RoCoF-based protection criteria in favor of mode-based and time-domain performance metrics.
On the theoretical side, the structural inversion of the droop-damping trade-off in GFM converters opens new avenues for robust decentralized control and hierarchical regulation that were previously inaccessible in conventional synchronous grids. The findings also call for further research into large-signal nonlinear stability, robustness to non-idealities in GFM implementation, and coordinated tuning in systems comprising heterogeneous converters and classical machines.
Conclusion
The modal analysis presented in this paper conclusively demonstrates that emulating high inertia and large droop in grid-forming power-electronic converters needlessly limits the stability and performance of modern power systems. Instead, optimal small-signal stability and frequency regulation are achieved with low droop and low virtual inertia, a regime that delivers strong oscillation damping and minimal reliance on secondary regulation. The results challenge prevailing regulatory trends and advocate for a fundamental re-evaluation of GFM control design, with a direct trajectory toward low-inertia, high-damping converter-dominated grids.