- The paper presents a motion planning framework using Stable Sparse RRT to compute safe, efficient trajectories tailored for human-piloted parafoils.
- It leverages a kinematic model with strict flight constraints—such as collision avoidance and bank angle limits—to minimize control effort and improve landing performance.
- Empirical results show that the algorithm outperforms human pilots by reducing control effort and providing smoother descent paths under various wind conditions.
Motion Planning for Safe Landing of a Human-Piloted Parafoil
Introduction and Motivation
Human error remains a dominant factor in skydiving accidents during parafoil piloting and landing, with poor decision-making and an absence of rigorous simulator-based training contributing to elevated risk. Traditional pilot instruction relies predominantly on heuristics and lacks principled real-time guidance. The paper addresses this gap by formulating and algorithmically solving the motion planning problem for human-piloted parafoils, considering safety-critical flight constraints. Unlike prior work focused on automated parafoil control, the proposed approach specifically targets the needs and operational restrictions of human pilots, aiming to generate safe, practical trajectories for both training and real-world landing scenarios.

Figure 1: Data collection involved human pilots conducting recorded parafoil descents with GPS instrumentation.
The methodological foundation relies on a kinematic model with state vector x=[x,y,h,ψ]T, capturing parafoil position, altitude, and heading. Dynamics are governed by fixed speed and glide ratio, with the bank angle ϕ as control input, and wind considered as a disturbance. Safety and feasibility constraints are explicit: the trajectory must maintain collision avoidance with 3D obstacles and respect operational envelopes on bank angle ([−π/6,π/6]), vertical velocity, and specific approach geometry—particularly a terminal segment against the wind for optimal flare conditions.
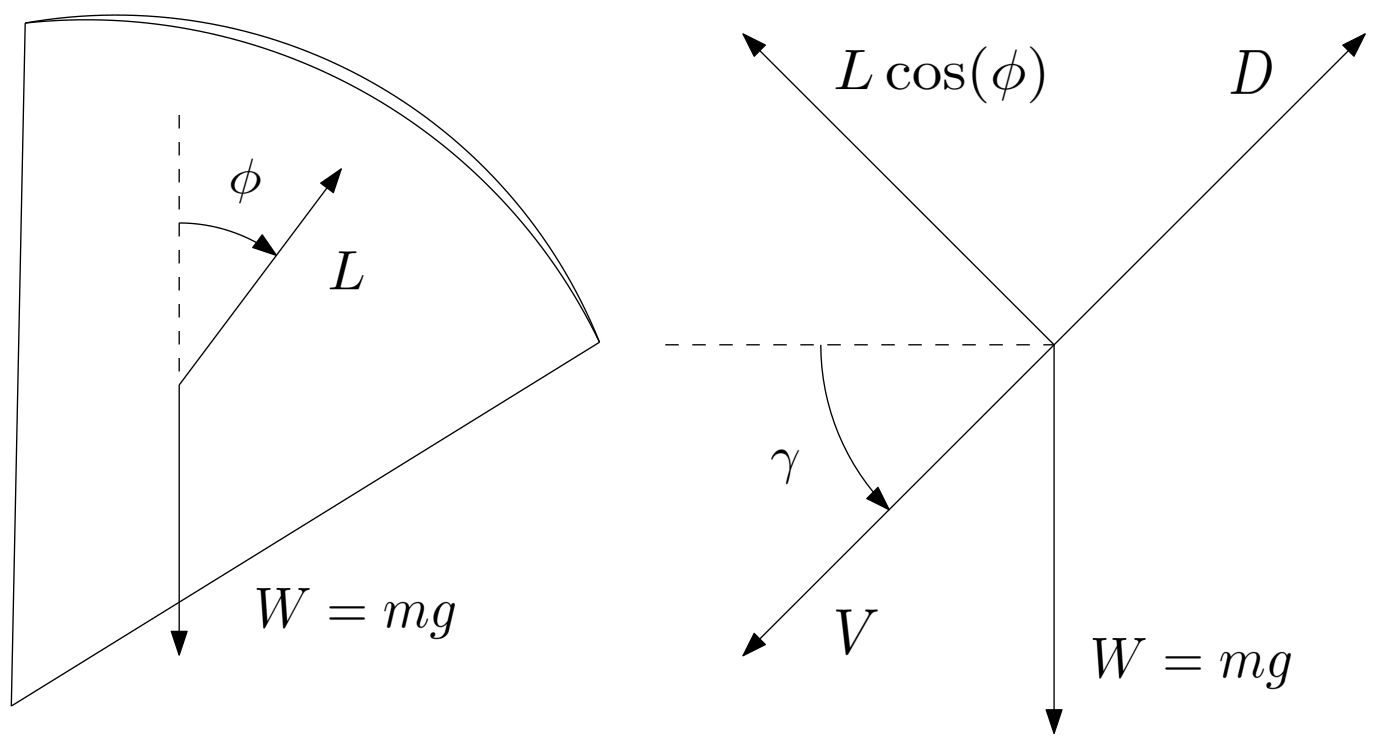
Figure 2: Force diagrams depict the primary aerodynamic and gravitational stresses governing parafoil kinematics.
The cost functional J=∫t0tfϕ2(t)dt penalizes aggressive or protracted turning maneuvers, selected as a direct proxy for safety due to the correlation between excessive control effort, increased descent rate, and accident likelihood.
Algorithmic Approach: Stable Sparse RRT
The core computational strategy leverages the Stable Sparse RRT (SST) algorithm—a sampling-based kinodynamic planner with anytime asymptotic optimality and efficient memory/samples usage. SST is adapted for human-piloted scenarios by focusing nearest neighbor selection on 3D position (excluding heading), enforcing additional constraints on the terminal segment (mandating a straight, upwind approach), and directly optimizing the physically interpretable cost on bank angle effort.
Crucially, the extension phase samples feasible controls and propagates dynamics numerically using high-order integration, ensuring the sequence of steering commands aligns with parafoil actuation. The planner gracefully handles workspace obstacles and prescribed altitude boundaries, outperforming control- or rule-based strategies in satisfying global optimality and constraint satisfaction.
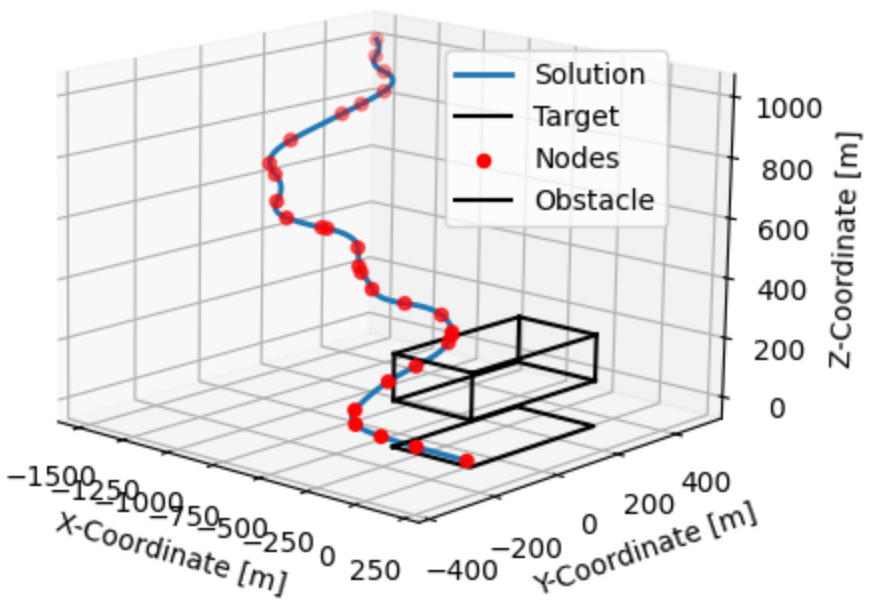
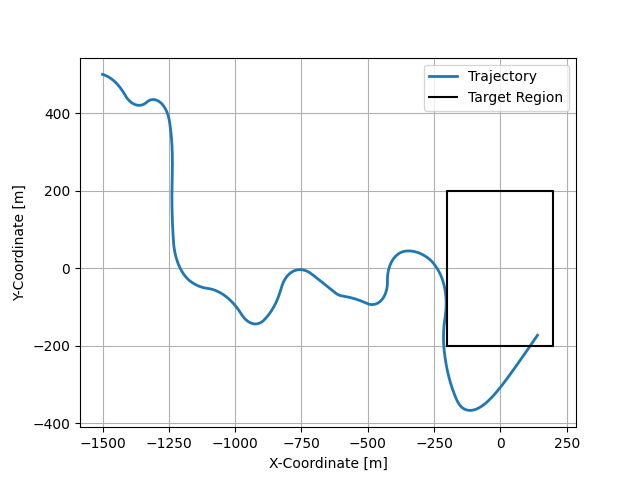
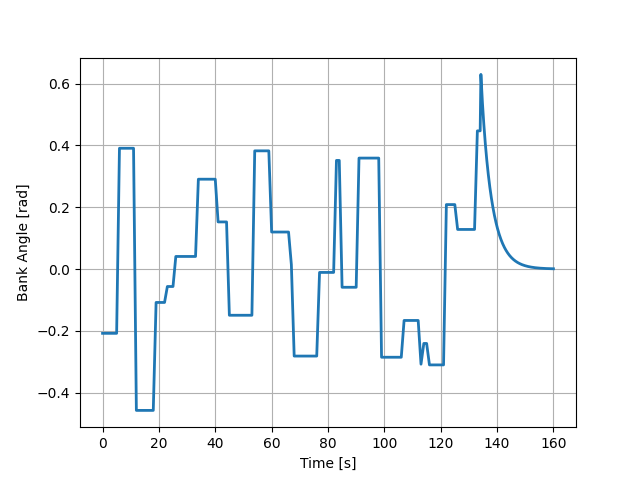
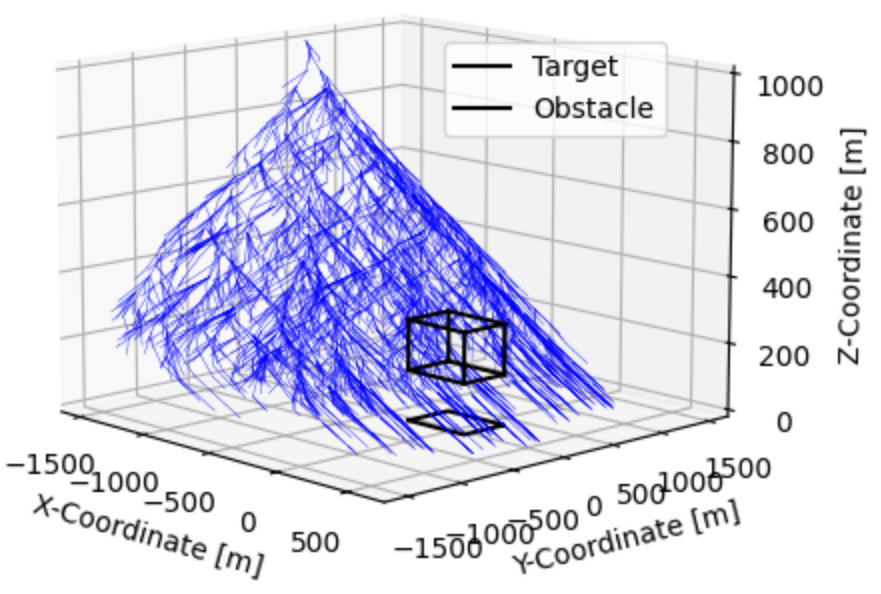
Figure 3: SST-planned trajectories, corresponding control signals, and exploration trees from typical algorithm runs.
Numerical and Empirical Evaluation
Simulation Results and Sensitivity
The algorithm reproducibly finds collision-free, cost-efficient solutions under various initial locations, headings, and wind conditions, with probability of success and cost exhibiting expected dependencies on computational budget and unconstrained wind magnitude. For moderate wind velocities (<8 m/s), SST provides feasible plans at high success rates.
Solution cost plateaus as runtime increases, reflecting convergence to locally (if not globally) minimal control effort paths.
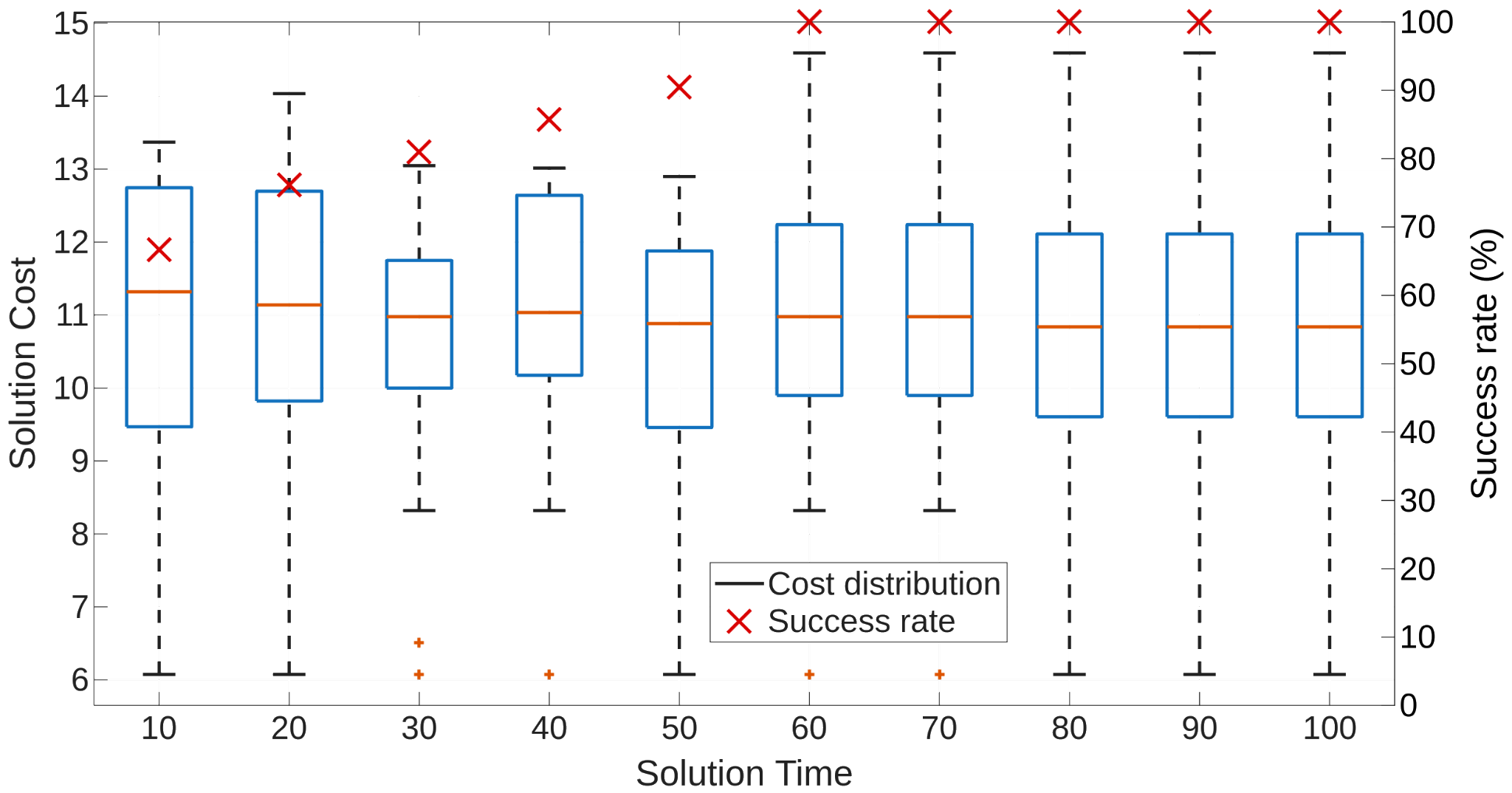
Figure 4: Distribution of final solution cost versus allowed planner runtime; costs stabilize above 50 seconds.
Comparison with Human-Generated Trajectories
Flight data from 19 human-piloted parafoil descents (collected via instrumented skydives) enable direct side-by-side trajectory evaluation. The human pilot typically prioritizes horizontal closure with the target zone prior to subsequent altitude loss via spiral descent, which increases control effort and, consequently, risk. In contrast, SST generates smoother, spatially distributed descents arriving at the final approach altitude without spirals, respecting all operational constraints.
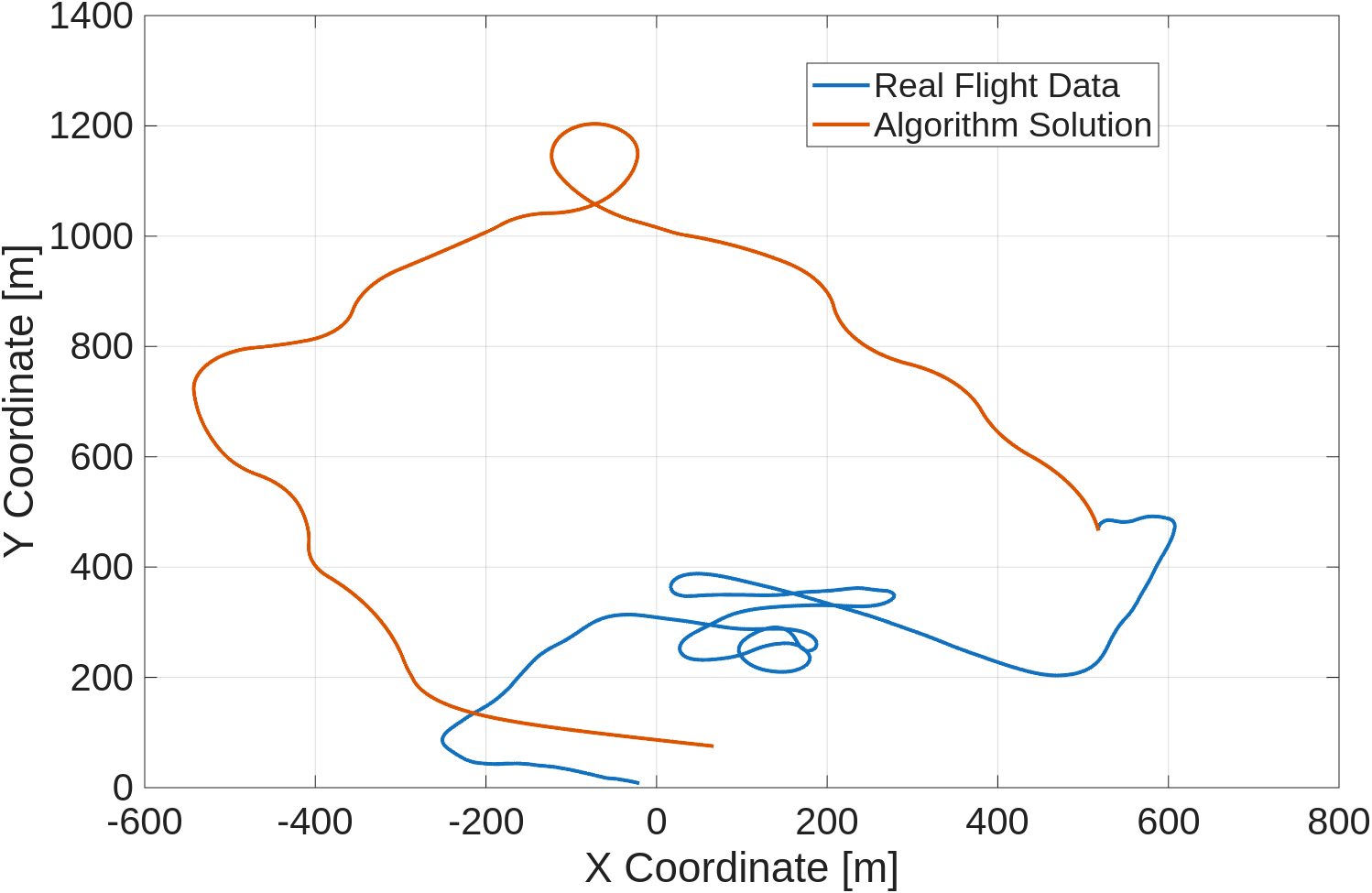
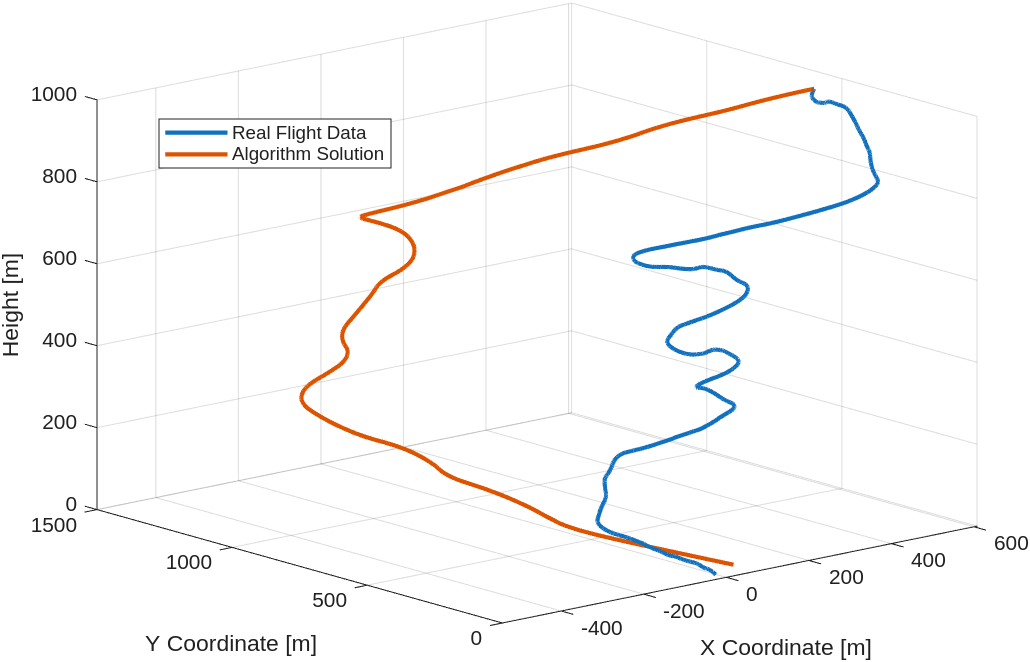
Figure 5: Representative case showing real pilot (blue) vs. algorithm solution (red): The latter exhibits gradual descent and avoids hazardous late turns.
Quantitatively, the Relative Optimality Gap (ROG) is positive in all test scenarios, ranging from 0.2 to 0.85, indicating substantial room for human improvement when benchmarked against algorithmic plans.
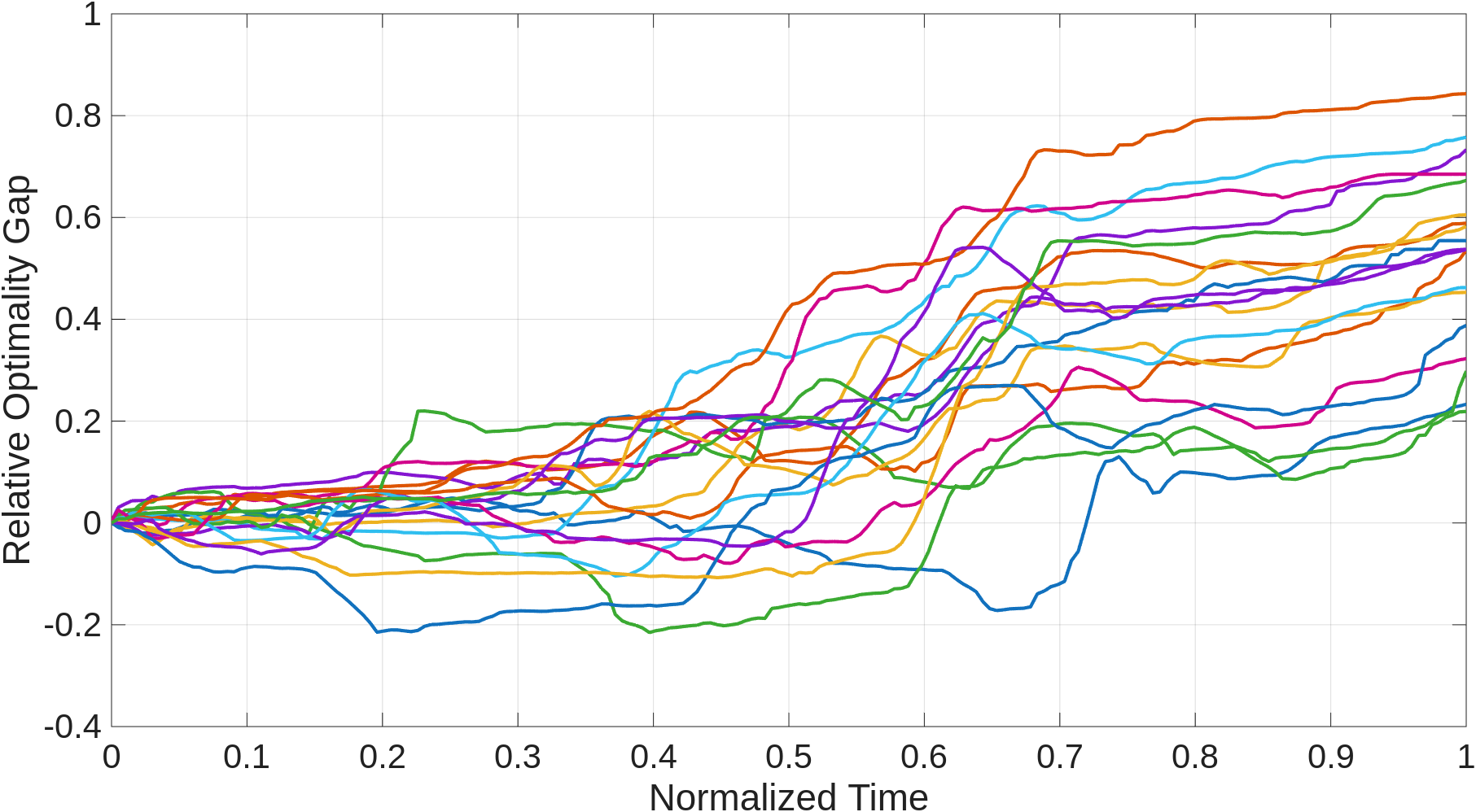
Figure 6: Time-resolved ROG between algorithm and human pilot across all real flight benchmarks. Positive values demonstrate superior cost performance by the algorithm throughout descent.
Detailed trajectory visualization shows that even in complex, constrained environments, the planner produces globally efficient, smooth descent paths, leveraging the complete 3D state space without decoupled or myopic maneuvers characteristic of human pilots.
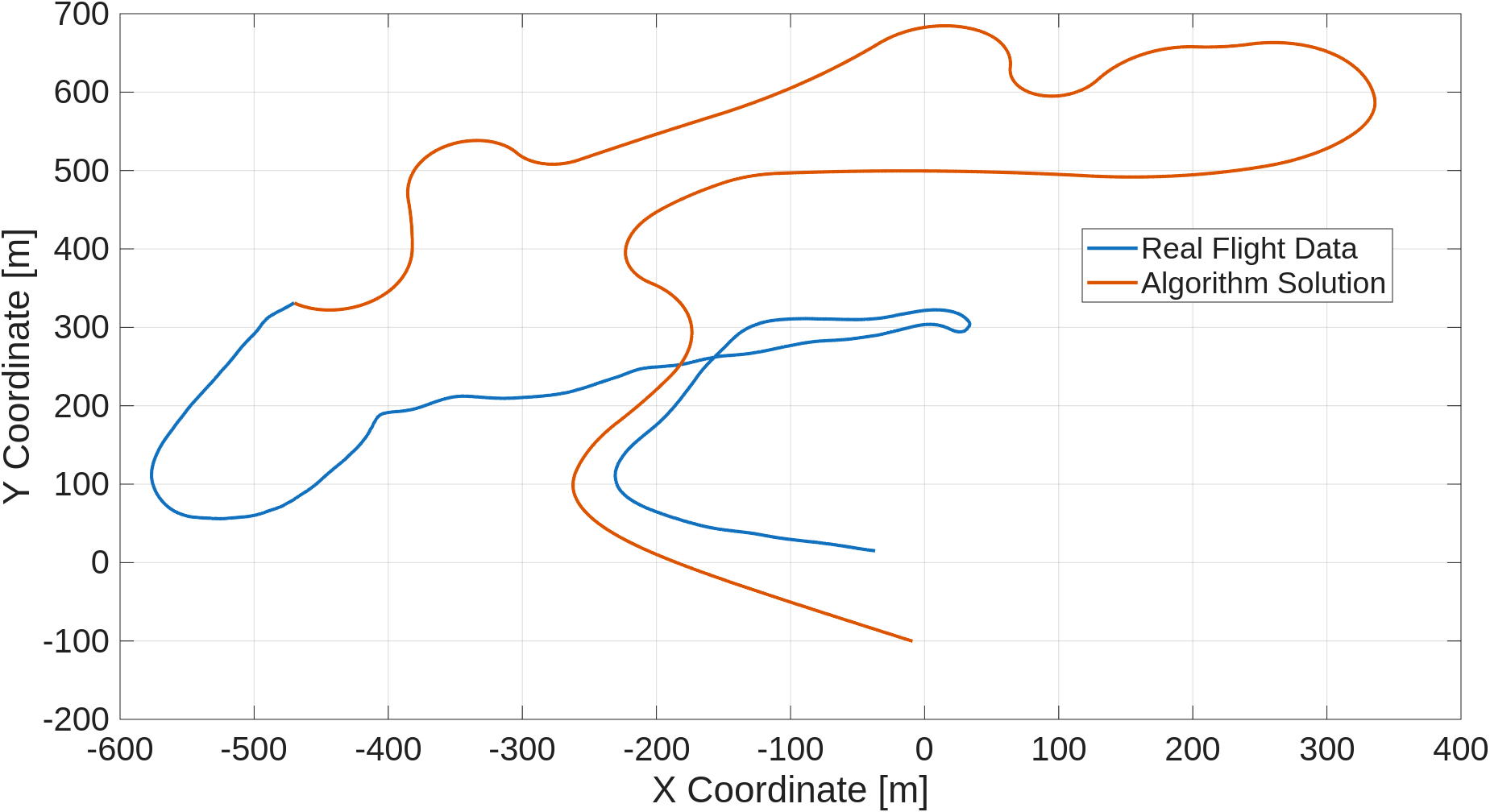
Figure 7: The lowest-difference test case (ROG = 0.16); even here, the planner avoids early U-turns favored by the pilot.
Case Study: Landing Site with Complex Terrain
The methodology is further validated on routes featuring airspace and terrain constraints (e.g., at Elsinore Skydive, where certain sectors are off-limits due to runway traffic or unsuitable landing terrain). The planner adheres to all spatial and altitude constraints, finds opportunities to traverse otherwise restricted airspace within allowed flight envelopes, and yields smoother spirals than the pilot, who tends to avoid risky crossings even when dynamically permissible.

Figure 8: Map of the Elsinore Skydive test area, notation showing regulated and forbidden zones.
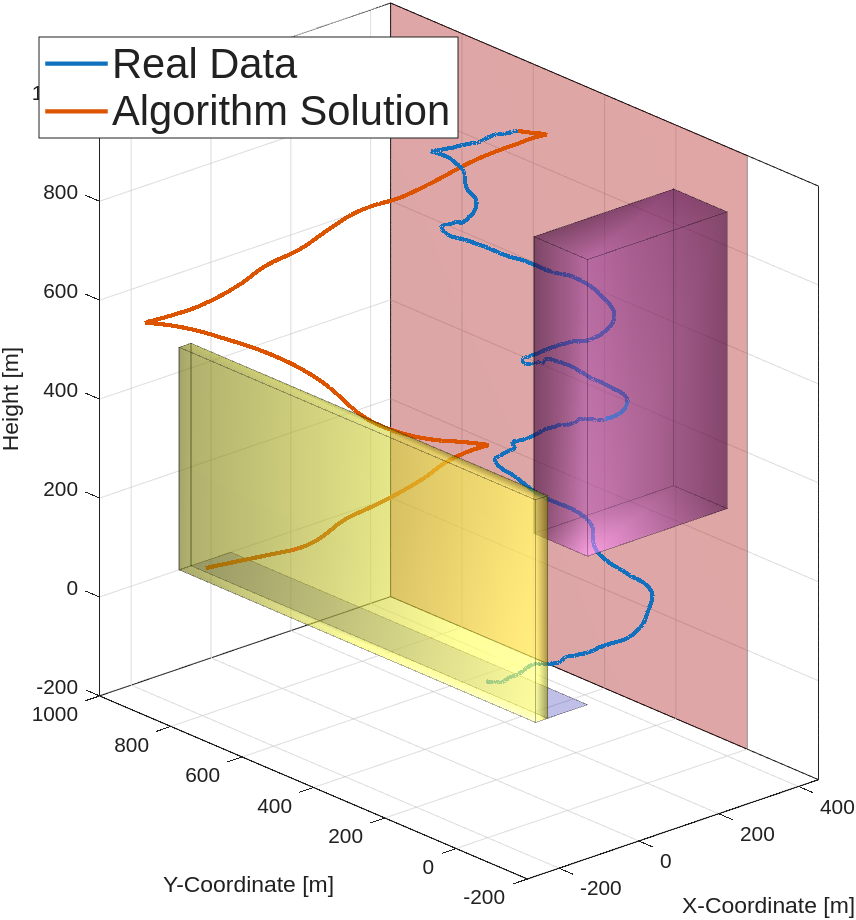
Figure 9: 3D rendering of algorithm-generated descent that clears all obstacles and airspace restrictions.
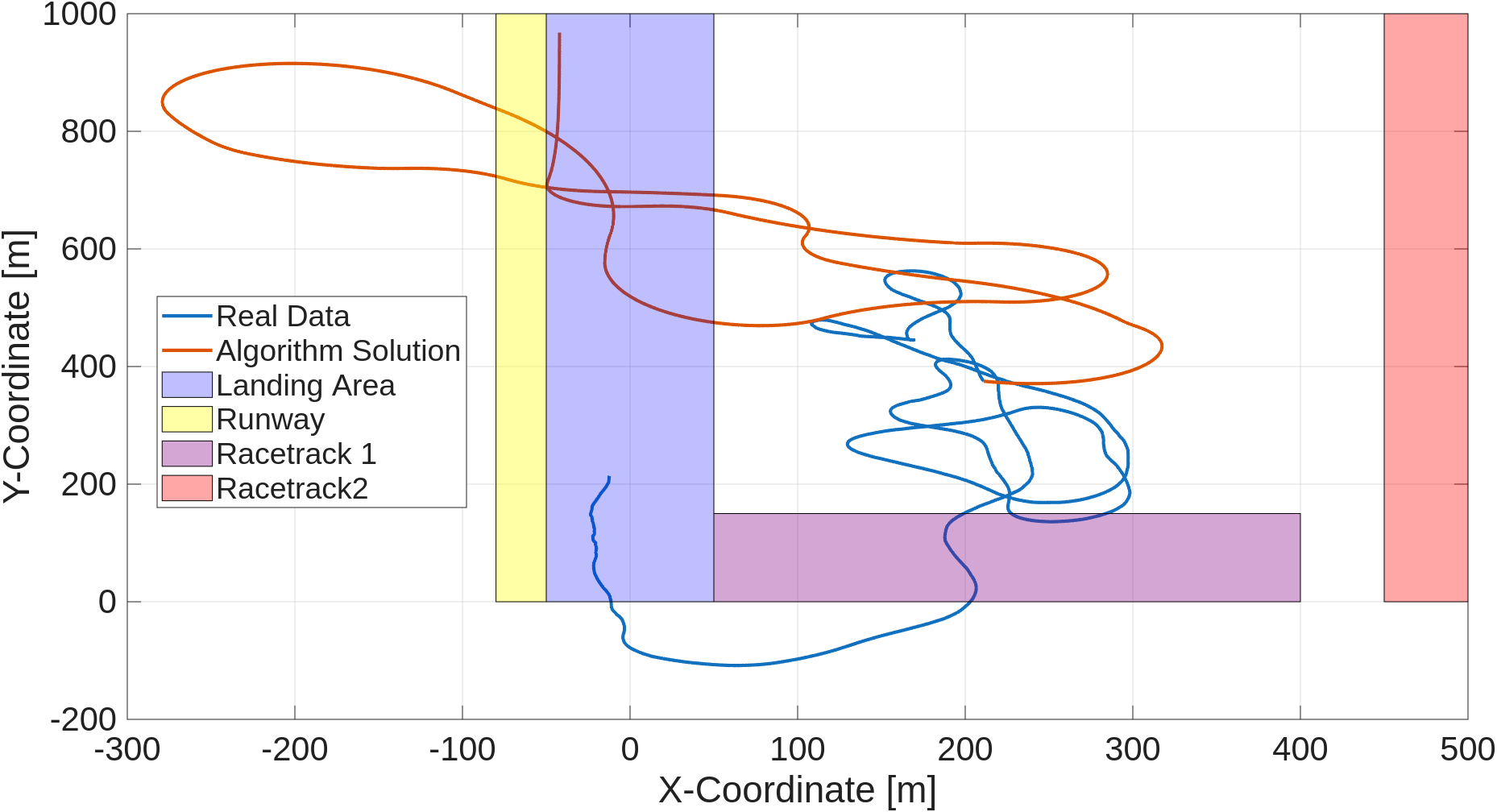
Figure 10: Top-down projection of the same descent: The algorithm leverages lateral space to further minimize cost.
Implications, Limitations, and Future Work
This work demonstrates that optimized, constraint-aware motion planning directly targeting human pilot needs can significantly reduce control effort, minimize hazardous maneuvers, and serve as a practical tool for next-generation parafoil simulators and in-flight decision aids. From a theoretical perspective, the results show that sampling-based kinodynamic planners, properly tailored, close significant optimality gaps inherent in human heuristics—implicating deficiencies in human spatial reasoning and multi-dimensional path planning, particularly under high-dimensional spatial and physical constraints.
Remaining challenges include richer modeling of wind fields, parafoil dynamics (including actuator limits and turbulence), and explicit multi-agent (collision-avoidance) extensions. Furthermore, real-time deployment in operational settings will require trajectory smoothing and intuitive human-machine interface designs for effective pilot adoption.
Conclusion
By formulating and solving a safety-focused parafoil trajectory planning problem using adapted kinodynamic sampling-based methods, this work offers compelling evidence that computer-generated flight plans can surpass current human practice in both safety and efficiency. The demonstrated optimality gaps suggest integration into pilot training protocols and trajectory visualizations will yield meaningful advances in parafoil landing safety, with future work poised to extend these results to more complex operational environments and pilot-automation collaboration paradigms.