Humanoid Robot Running Through Random Stepping Stones and Jumping Over Obstacles: Step Adaptation Using Spring-Mass Trajectories
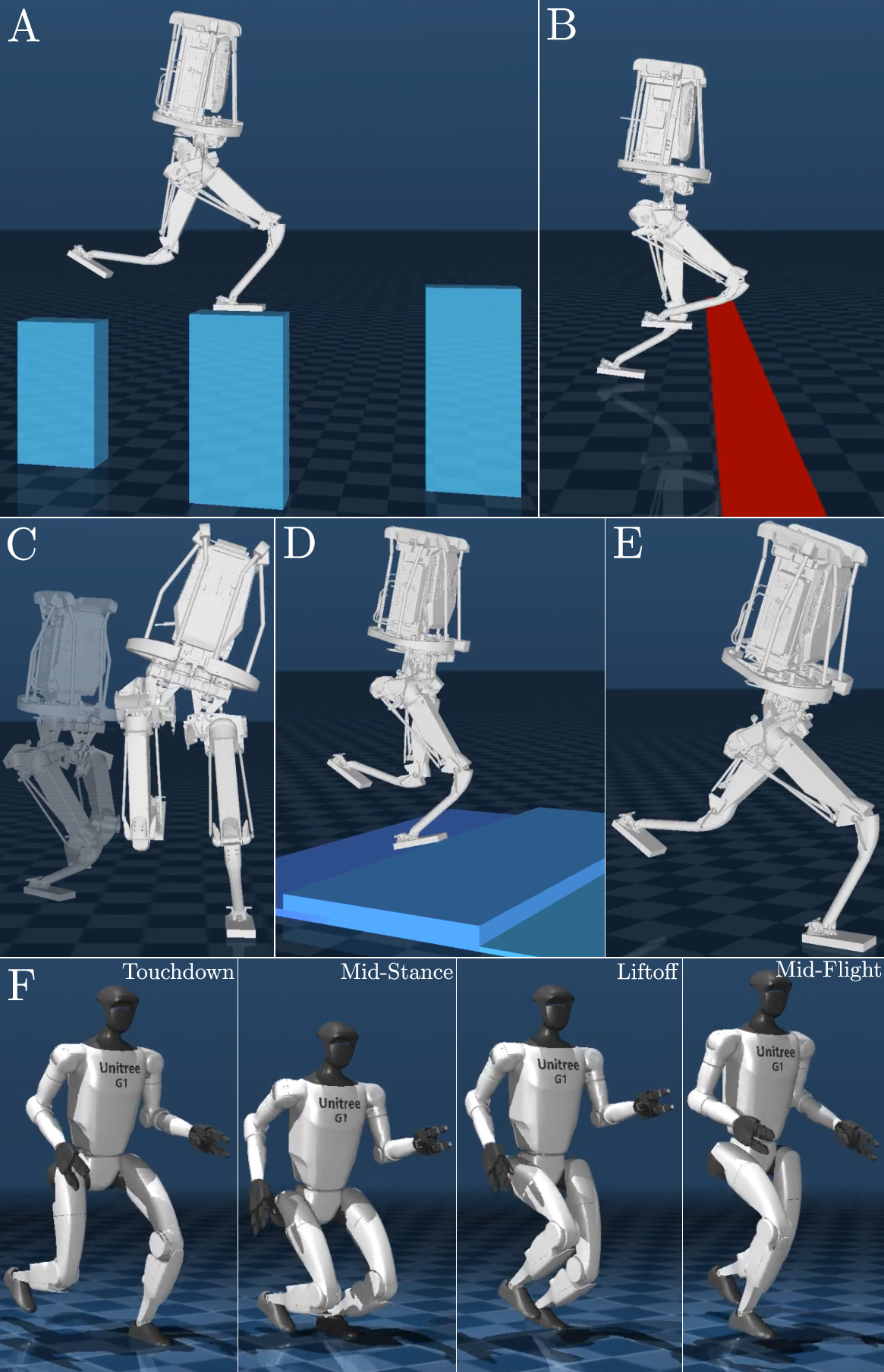
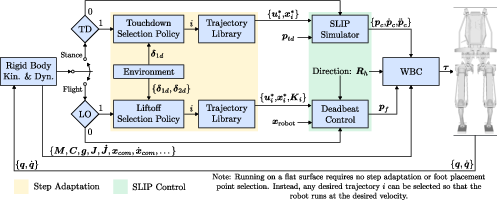
Abstract: This study proposes a step adaptation framework for running through spring-mass trajectories and deadbeat control gain libraries. It includes four main parts: (1) Automatic spring-mass trajectory library generation; (2) Deadbeat control gain library generation through an actively controlled template model that resembles the whole-body dynamics well; (3) Trajectory selection policy development for step adaptation; (4) Mapping spring-mass trajectories to a humanoid model through a whole-body control (WBC) framework also accounting for closed-kinematic chain systems, self collisions, and reactive limb swinging. We show the inclusiveness and the robustness of the proposed framework through various challenging and agile behaviors such as running through randomly generated stepping stones, jumping over random obstacles, performing slalom motions, changing the running direction suddenly with a random leg, and rejecting significant disturbances and uncertainties through the MuJoCo physics simulator. We also perform additional simulations under a comprehensive set of uncertainties and noise to better justify the proposed method's robustness to real-world challenges, including signal noise, imprecision, modeling errors, and delays. All the aforementioned behaviors are performed with a single library and the same set of WBC control parameters without additional tuning. The spring-mass and the deadbeat control gain library are automatically computed in 4.5 seconds in total for 315 different trajectories.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Humanoid Robot Running Through Random Stepping Stones and Jumping Over Obstacles — Explained Simply
What is this paper about?
This paper shows how a humanoid robot (a robot shaped like a human) can run through tricky, changing environments—like hopping across random stepping stones, jumping over surprise obstacles, and handling pushes—without pre-programming every move. The key idea is to use a simple “pogo-stick” model of running to plan steps and then make the full robot copy those motions safely and smartly.
What questions were the researchers trying to answer?
The researchers wanted to solve four practical problems for running robots:
- How can a robot quickly choose where to put its foot next when the ground is unpredictable?
- How can it adjust its steps on-the-fly to stay stable after errors, pushes, or surprises?
- How can a simple model of running (like a pogo stick) guide a complex humanoid body with arms, legs, and joints?
- Can one method handle many different running tasks without constant re-tuning?
How did they do it? (Methods in plain language)
The approach has four main parts that work together:
A simple model: think “pogo stick”
They start with a classic running model called SLIP (spring-loaded inverted pendulum). Imagine the robot’s body as a mass bouncing on a springy leg—like a pogo stick. This model is simple but surprisingly good at capturing how humans and animals run.
- “Apex” means the highest point in the robot’s bounce each step.
- The model uses things like speed, bounce height, and leg “springiness” to describe a running pattern.
Building a “playlist” of possible steps (trajectory library)
Instead of planning from scratch each time, they automatically create a library of hundreds of precomputed running “clips”—each with different speeds, bounce heights, and leg stiffness. Think of it like a playlist of step options. The library:
- Covers 315 different running patterns.
- Takes about 4.5 seconds to generate.
- Stores how far each step would land forward and sideways under that pattern.
A “get-back-on-track in one step” controller (deadbeat control)
If something goes wrong (like a push or a small error), the robot adjusts the next foot placement and leg settings so it can get back on track in the next step. This is called “deadbeat” control—like hitting reset quickly.
To make this realistic for full robots, they:
- Use a template that includes a foot area and friction (so feet don’t slip or tilt).
- Compute how the system reacts from one apex (top of the bounce) to the next.
- Build a matching “gain library” that tells how to tweak the next leg angle/length based on the current error.
Simple analogy: it’s like your phone’s GPS instantly recalculates the route if you miss a turn, and tries to correct in the very next move.
Picking the next step in real time (step adaptation)
When the robot must land on stepping stones or jump obstacles, it can’t just run normally—it must place its foot precisely. So the system:
- Looks ahead and chooses the best “clip” from the library that lands on the right spot.
- Checks safety (friction, not slipping), body limits (how far joints can move), and stability.
- Uses a “two-step look ahead” strategy: planning at least two steps ahead guarantees it can converge to a stable pattern while still hitting the target stone.
Making a full humanoid follow the plan (whole-body control)
A full humanoid is way more complicated than a pogo stick: it has arms, legs, a torso, and many joints. To make everything work together, they use a whole-body controller (WBC)—like a conductor coordinating all body parts.
They add two important features:
- Reactive limb swinging: the robot moves its arms and legs to counteract body tilt and keep balance when plans change suddenly.
- Self-collision and closed-chain handling: it avoids hitting itself and respects mechanical constraints.
This lets the robot copy the simple CoM (center-of-mass) plan while staying stable and not breaking any physical rules.
What did they find? (Main results)
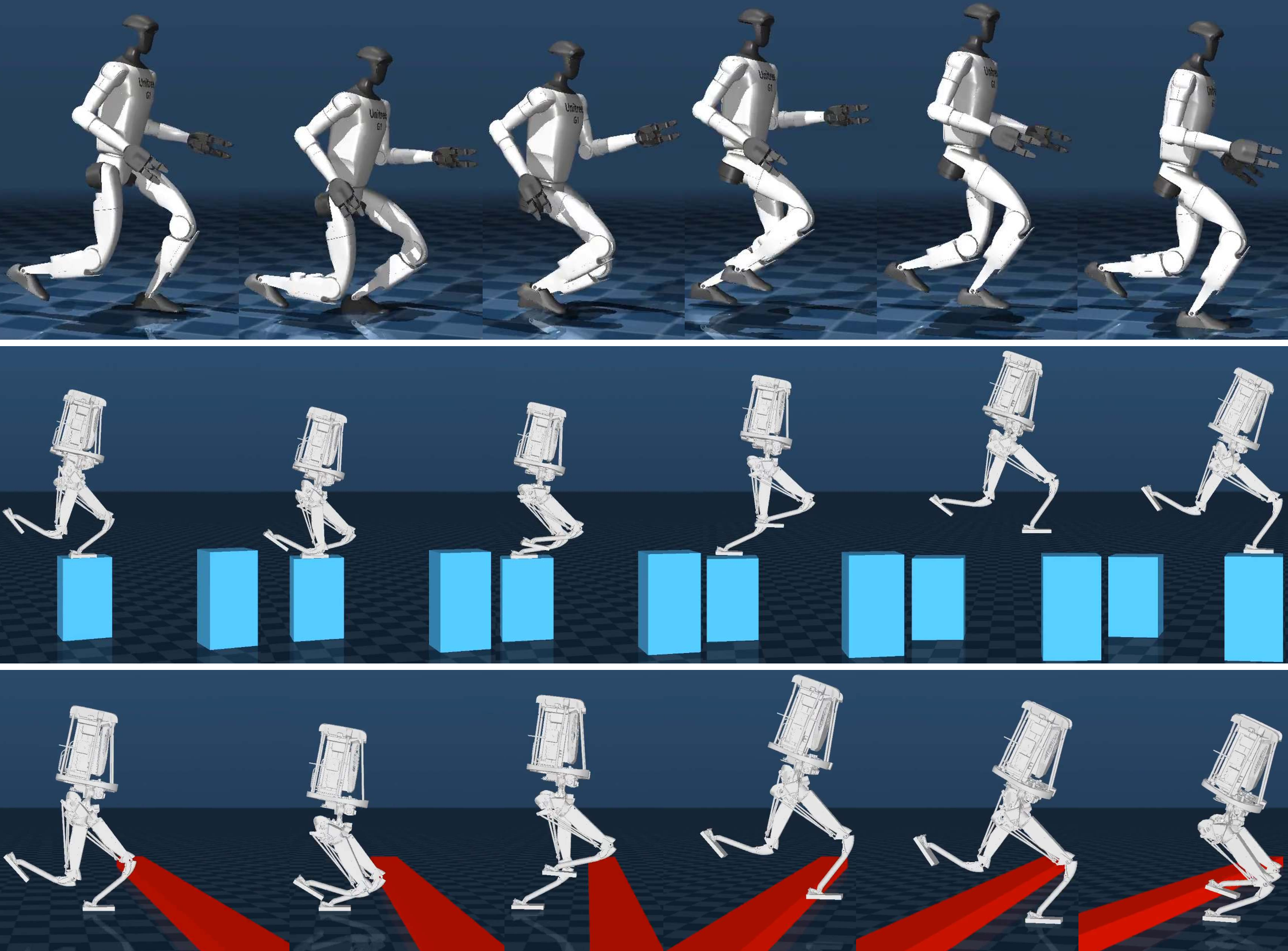
Using one unified library and the same control settings (no extra tuning), in simulation the robot could:
- Run across randomly placed stepping stones.
- Jump over randomly appearing obstacles.
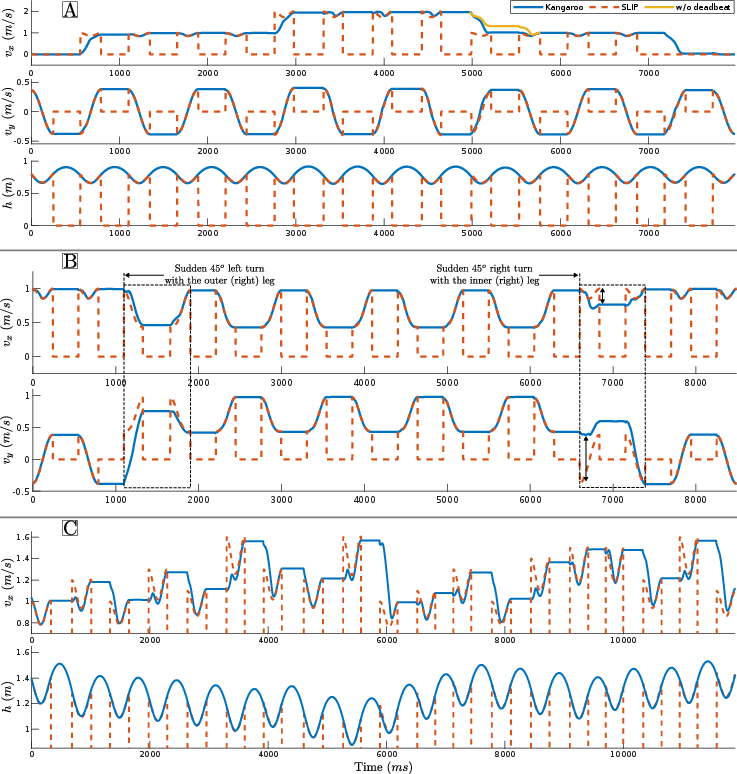
- Make sudden turns, do slalom moves, and handle height changes in the terrain.
- Stay stable after strong pushes by taking wider or adjusted steps.
- Switch between different running patterns on-the-fly without manual parameter tweaking.
Other highlights:
- The step library (315 trajectories) is generated automatically in about 4.5 seconds.
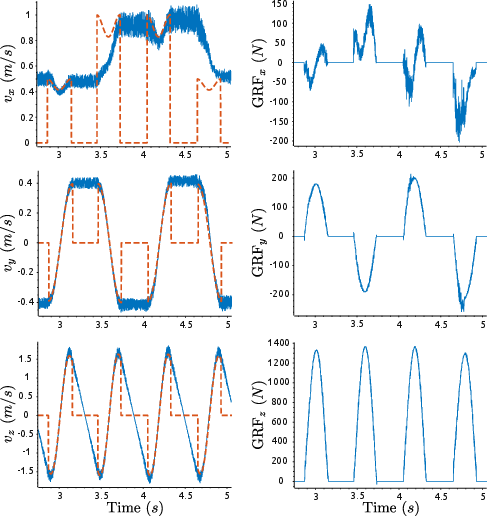
- It remained robust under many kinds of “real-world” imperfections: sensor noise, modeling mistakes, imprecise actions, and signal delays.
- The behaviors generalize across different humanoid robots (they show examples including Unitree G1 in the paper’s figures).
- Compared to other running methods that need hand-picking tricky parameters (like exact stance time or flight time), this method selects those automatically, reducing guesswork.
Why this matters: running is harder than walking for robots because of flight phases (both feet off the ground), harsh impacts, and less stability. Showing that step adaptation and disturbance rejection work together in running is a big step forward.
Why does it matter? (Implications)
This research suggests a practical path to agile, adaptable running in the real world:
- Field use: search-and-rescue or industrial inspection where ground is unpredictable.
- Fewer manual tweaks: the robot can handle different speeds, heights, and obstacles without constant re-tuning.
- Bridging simple models and complex robots: they show how a clean, physics-based model (pogo-stick style) can drive a full humanoid with many joints safely.
- Robustness: handling noise, delays, and surprise obstacles is essential for moving from lab demos to dependable field robots.
In short, the work shows a way for humanoid robots to run smartly—choosing steps on the fly, correcting quickly after errors, and staying stable—using a fast library of spring-mass trajectories and a whole-body controller that coordinates the entire robot.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise list of what remains missing, uncertain, or unexplored, focusing on actionable directions for future work:
- Real-world validation: The approach is demonstrated in simulation (MuJoCo) with noise and delays, but lacks hardware experiments on full-scale humanoids to assess actuator saturation, impact resilience, sensor reliability, and long-term robustness under real contact uncertainties.
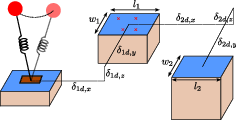
- Perception and environment mapping: The step adaptation and obstacle-jump policies assume access to precise geometric parameters (e.g., stone sizes l,w and relative displacements δ1d, δ2d), yet the paper does not integrate or evaluate perception pipelines (vision, lidar) for online detection, pose estimation, occlusion handling, mislocalization, or latency-induced planning errors.
- Formal stability guarantees: Convergence claims (e.g., “guaranteed convergence in two steps”) rely on linearization (apex-to-apex Jacobians) and feasibility projections but lack a rigorous hybrid-system proof for the full whole-body controlled robot, including quantified regions of attraction, robustness margins, and conditions under which guarantees hold.
- Gain conditioning and singularities: The deadbeat gains K=−J_u⁻¹J_x assume J_u is invertible and well-conditioned; the paper does not analyze gain conditioning across the library, identify singular configurations, or propose regularization/adaptive methods when J_u is ill-conditioned or near-singular.
- Template–whole-body mismatch: The actively controlled point-mass with a planar foot approximates whole-body force feasibility, but the paper does not quantify the fidelity gap to full humanoid dynamics (e.g., distributed contacts, centroidal angular momentum, joint limits) nor the resultant impact on the validity of the deadbeat gains when mapped via WBC.
- Contact modeling fidelity: The force feasibility QP uses a polyhedral cone from foot corners with a constant friction coefficient μ, neglecting torsional friction, center-of-pressure bounds, foot rotations, compliance, and surface irregularities; it is unclear how to extend the method to more realistic or uncertain contact models.
- Friction uncertainty: The controller assumes known and constant μ; there is no strategy for online friction estimation, adaptation to variable/unknown μ, or ensuring stability when friction is lower than expected (e.g., wet or dusty stepping stones).
- Energy, torque, and thermal limits: No analysis of energy consumption, peak ground reaction forces, actuator power/torque limits, or thermal constraints—critical for hardware viability during agile running and jumping.
- Library coverage and interpolation: The trajectory library (315 entries) is discretized over limited ranges; the paper does not address completeness, interpolation between trajectories, or continuous parameter optimization to avoid large switching-induced transients.
- Online computational budget: While the library is generated in ~4.5 s offline, the paper does not characterize worst-case latency of online selection (touchdown/liftoff policies), scalability with library size, or feasibility under tight flight-phase time budgets on embedded hardware.
- Switching transients and smoothing: Frequent trajectory switching may induce discontinuities in desired CoM and limb commands; the paper lacks smoothing mechanisms (e.g., blending, homotopy) and does not analyze their necessity or impact on stability and wear.
- Reactive limb-swing evaluation: The proposed base-orientation-error–driven reactive limb swing is not quantitatively evaluated (e.g., ablation studies, disturbance envelopes, performance metrics), nor are the gains’ sensitivity and generalization across robots analyzed.
- Self-collision and environment collision: Self-collision avoidance is mentioned but not detailed in terms of algorithm, guarantees, and completeness; environmental collision avoidance for swing legs and arms around obstacles is not addressed.
- Apex and touchdown state estimation: Apex detection via v_z/g and touchdown detection are assumed; there is no analysis of state estimation drift, sensor biases, IMU integration errors, or maximum tolerable estimation error before convergence breaks.
- Terrain diversity: Beyond random height differences and edge stepping, the method is not evaluated on slopes, stairs, compliant/deformable substrates, loose gravel, or soft stepping stones—scenarios that challenge contact feasibility and timing.
- Multi-step lookahead: The planning guarantees are framed around two steps; the paper does not study adaptive horizons for longer sequences of constrained footholds, nor the trade-off between longer lookahead and computational burden.
- Disturbance envelopes: Although disturbances are simulated (e.g., pushes), there is no quantified envelope of tolerable disturbance magnitudes and directions, nor sensitivity analyses that relate disturbance sizes to required changes in stance/flight times or foot placement limits.
- Generalization across robots: The claim of generalizability (multiple robots in figures) is not supported by systematic cross-robot experiments or guidelines for mapping SLIP parameters (y_h, l_h, stiffness ranges) and WBC weights to differing morphologies and actuators without retuning.
- Foot and ankle kinematic limits: Real hardware imposes ankle pitch/roll/yaw limits, center-of-pressure bounds, and foot shape constraints; the policies use simplified leg-angle and length ranges without detailing how these map to actual joint-space limits and foot-sole constraints.
- Obstacle clearance modeling: Jumping policy checks apex clearance using leg geometry at apex, but obstacle-leg interactions can occur mid-stance or during swing; the paper does not consider time-varying clearance profiles or guarantee clearance over non-box-shaped obstacles.
- Heading and yaw control: Direction changes and slalom motions are illustrated, yet yaw rate limits, trunk yaw dynamics, and heading stability constraints are not quantified or controlled explicitly.
- Failure recovery: The framework does not describe recovery strategies for missteps (landing off-target, partial foothold contact, unexpected compliance), nor fall-prevention mechanisms when planned convergence fails due to unmodeled disturbances.
- Benchmarking against baselines: The paper’s advantages over BID/DCM are argued conceptually; there is no quantitative comparison (success rates, energy, maximum speed, disturbance rejection) against existing step adaptation frameworks.
- Parameter sensitivity and tuning-free claim: Despite the “tuning-free” narrative, many parameters (WBC weights, K_p/K_d, friction μ, hip offset y_h, limb-swing gains) are present; the paper does not provide sensitivity analyses or methods for automatic tuning across different tasks and robots.
- Robustness of linearization: Deadbeat design leverages first-order linearization around periodic trajectories; the paper does not quantify nonlinearity-induced deviations, provide Lipschitz bounds, or robust control extensions for large errors.
- Sensing-to-control integration: The policies assume immediate availability of obstacle info “after touchdown”; real systems will face perception-to-control latencies and asynchronous updates; integrating robust delay compensation and out-of-order measurements remains unaddressed.
Practical Applications
Immediate Applications
The following applications can be deployed now, primarily in simulation and controlled environments, leveraging the paper’s automatic trajectory/gain library generation, deadbeat control for apex-to-apex stabilization, trajectory selection policies, and whole-body control with reactive limb swinging.
- SLIP-based controller prototyping toolkit
- Sector: software, robotics, academia
- Use case: A turnkey workflow to auto-generate spring-mass trajectory libraries and apex-to-apex deadbeat control gains (4.5 s for 315 trajectories), then run online trajectory selection and whole-body control in MuJoCo or similar simulators.
- Tools/products/workflows: “SLIP-to-WBC” SDK/plugin for simulators (MuJoCo/Isaac), ROS node for trajectory library generation and online selection, example policy implementations for obstacles/stepping stones.
- Assumptions/dependencies: Access to a physics simulator; robot model (URDF/SDF); inverse-dynamics WBC; feasibility constraints (friction cone, foot polygon) configured per robot.
- Real-time footstep adaptation module for humanoid and bipedal R&D platforms
- Sector: robotics (R&D labs, pilot deployments)
- Use case: Step adaptation on lab setups (stepping stones, slalom, sudden direction changes) with existing humanoids capable of moderate-speed dynamic locomotion; improve safety and robustness through deadbeat gains and reactive limb swinging.
- Tools/products/workflows: Controller module integrated with WBC (QP-based inverse dynamics), reactive limb-swing task, self-collision avoidance; trajectory selection policies for touchdown/liftoff.
- Assumptions/dependencies: Platform must support single-leg stance dynamics and brief flight phases; high-rate state estimation; reliable touchdown detection; adequate actuator bandwidth and impact tolerance; careful tuning of foot-ground friction and contact model.
- Disturbance rejection benchmarking suite for legged robots
- Sector: academia, robotics
- Use case: Evaluate controllers under pushes, modeling errors, signal noise, delays, unobserved height changes; compare SLIP-based step adaptation versus BID/DCM methods without manual tuning of stance/flight times.
- Tools/products/workflows: Scenario generator (push impulses, height mismatches), metrics (convergence rate, feasibility projections, foot placement errors), reproducible scripts.
- Assumptions/dependencies: Simulator reproducibility; standardized metrics for hybrid dynamics; availability of robot-specific WBC templates.
- Physics-based character locomotion for animation and games
- Sector: media, entertainment, software
- Use case: Real-time running with adaptive foot placement on uneven terrain using SLIP trajectory library and deadbeat gains; no manual tuning of timing parameters.
- Tools/products/workflows: Middleware plugin for game engines (Unity/Unreal) that couples SLIP trajectory selection with character rigs; footstep feasibility checks with friction cones for realism.
- Assumptions/dependencies: Character rig and physics parameters approximating SLIP; performance optimization for frame rates; simplified contact modeling acceptable.
- Curriculum and lab exercises for legged locomotion
- Sector: education, academia
- Use case: Teach hybrid dynamics, apex Poincaré maps, feasibility cones, and WBC via hands-on labs that reproduce random stepping stones and obstacle jumps in simulation.
- Tools/products/workflows: Course modules, notebooks, and assignments that implement trajectory search, gain estimation, and selection policies; MuJoCo scenes and ROS integration.
- Assumptions/dependencies: Access to educational licenses; student familiarity with optimization/QP and rigid-body dynamics.
- Data generation for RL pretraining and controller imitation
- Sector: machine learning, robotics, academia
- Use case: Generate physically grounded rollouts exhibiting step adaptation, obstacle jumps, disturbance rejection; use as expert trajectories for imitation/pretraining.
- Tools/products/workflows: Dataset exporter (states, actions, foot placements, feasibility status), configurable libraries spanning velocities, apex heights, stiffness, lateral angles.
- Assumptions/dependencies: Domain gap handling between template models and full-body policies; careful selection of observation/action spaces to avoid overfitting.
- WBC “reactive limb swing” plugin
- Sector: robotics software
- Use case: Improve postural stability without per-trajectory tuning by leveraging base orientation error to drive redundant leg/arm joints during stance/flight.
- Tools/products/workflows: Add-on task module for existing WBC stacks (e.g., IHMC, Drake, DLR frameworks); tunable gains that couple limb motions to centroidal/base orientation.
- Assumptions/dependencies: Accurate base orientation estimation; robot-specific joint limits and self-collision constraints must be integrated.
- Safety evaluation protocols in test facilities
- Sector: industry (warehousing, manufacturing R&D)
- Use case: Controlled trials of dynamic footstep adaptation (jogging/fast walking) over discrete footholds, quantifying impact forces, slip risk, and controller recovery margins.
- Tools/products/workflows: Standardized test courses, instrumentation for GRFs and foot slips, safety envelopes linked to feasibility cone checks.
- Assumptions/dependencies: Restricted environments; trained operators; limits on speed and allowable impacts; compliance with occupational safety guidelines.
Long-Term Applications
The following applications require further research, scaling, hardware development, and integration (especially perception, high-power actuation, and safety/regulatory readiness) to move from simulation/pilot to widespread deployment.
- Autonomous search-and-rescue humanoids traversing rubble and gaps
- Sector: public safety, defense, robotics
- Use case: Step adaptation and obstacle jumping over unstable, unstructured terrain without extensive manual tuning; rapid re-planning across two-step horizons to maintain stability.
- Tools/products/workflows: Perception-to-foothold pipeline (terrain mapping, friction estimation), SLIP trajectory selection integrated with vision, robust WBC with impact mitigation.
- Assumptions/dependencies: High-power, impact-resistant hardware; robust contact sensing; reliable onboard SLAM; legal/safety certification for deployment in hazardous zones.
- Industrial inspection in complex plants (catwalks, pipe racks)
- Sector: energy, chemicals, manufacturing
- Use case: Dynamic traversal across discrete footholds and small gaps; automated re-planning when encountering obstacles or pushes.
- Tools/products/workflows: Plant-specific locomotion maps with discrete step regions; continuous monitoring of contact feasibility; remote ops dashboards.
- Assumptions/dependencies: Platform endurance (thermal, dust, fluids), reliable friction and edge detection, fall protection systems, compliance with plant safety standards.
- High-speed warehouse mobility for humanoid assistants
- Sector: logistics, warehousing
- Use case: Faster traversals with adaptive foot placement in cluttered aisles, handling unpredictable obstacles and human interactions.
- Tools/products/workflows: Integrated human-aware planning, speed governors, compliance controllers; step adaptation tied to perception and behavior policies.
- Assumptions/dependencies: Strong safety case for running near people; policies for maximum speed and impact limits; insurance and regulatory approvals.
- Planetary exploration robots navigating natural stepping stones
- Sector: space exploration
- Use case: Traverse rocks, ledges, and small gaps with trajectory library switching and apex-to-apex stabilization to handle communication delays and uncertain friction.
- Tools/products/workflows: Radiation-hardened control units, terrain classification, adaptive feasibility cones under unknown soil mechanics, energy-aware trajectory selection.
- Assumptions/dependencies: Extreme robustness to environmental uncertainty; limited computation and communication; specialized materials and actuation.
- Advanced prosthetics and exoskeletons enabling dynamic locomotion
- Sector: healthcare, human augmentation
- Use case: Adapt leg stiffness/angle and swing kinematics to user intent and terrain changes for jogging/running assistance.
- Tools/products/workflows: Human-in-the-loop apex state estimation; safety envelopes on GRFs; personalized trajectory libraries tuned to physiology.
- Assumptions/dependencies: Medical safety and regulations; comfort and energy transfer; reliable intent detection; ethical considerations in high-speed assistance.
- Standardized control libraries for OEMs (“SLIP-to-WBC Autopilot”)
- Sector: robotics industry
- Use case: Vendor-grade modules that auto-generate trajectory/gain libraries per robot, enforce friction and foot polygon feasibility, and expose APIs for step adaptation with minimal tuning.
- Tools/products/workflows: Robot-specific calibration tools; certification tests; performance benchmarks; maintenance workflows for library updates.
- Assumptions/dependencies: Broad interoperability across WBC stacks; hardware variability (mass distribution, foot geometry); guarantees for stability and fail-safes.
- Perception-integrated footstep planning with uncertainty handling
- Sector: robotics, software
- Use case: Fuse onboard vision/LiDAR with SLIP trajectory selection to place feet within stepping stone regions, accounting for pose uncertainty and friction variance.
- Tools/products/workflows: Probabilistic feasibility cones, risk-aware trajectory selection, two-step lookahead planning as formalized in the paper’s convergence analysis.
- Assumptions/dependencies: Accurate terrain segmentation; low-latency state estimation; robust probabilistic models; compute budgets for real-time fusion.
- Hardware acceleration and on-device learning for trajectory libraries
- Sector: robotics, embedded systems
- Use case: Scale libraries (thousands of trajectories) and update deadbeat gains online for wear-and-tear or environmental drift; leverage GPUs/NPUs or dedicated accelerators.
- Tools/products/workflows: Incremental library refinement; active learning loops; hardware-adapted QP solvers for feasibility projections.
- Assumptions/dependencies: Embedded compute resources; power budget; robust online validation/certification to prevent unsafe updates.
- Regulatory frameworks and safety standards for dynamic humanoid locomotion
- Sector: policy, standards
- Use case: Define test protocols, certification criteria, and operating envelopes for running/jumping robots in public and industrial environments (impact limits, slip risks, fail-safes).
- Tools/products/workflows: Standard test courses, reporting formats for feasibility violations and recovery behaviors, guidelines for controller transparency and logs.
- Assumptions/dependencies: Cross-industry collaboration; incident data; alignment with existing machinery and robotics safety standards.
- Cross-domain transfer to quadrupeds and hybrid morphologies
- Sector: robotics
- Use case: Adapt trajectory selection and deadbeat stabilization concepts to multi-legged platforms for dynamic stepping and gap traversal.
- Tools/products/workflows: Template-model mapping for different morphologies; limb-swing coupling strategies; feasibility cones per foot.
- Assumptions/dependencies: Model fidelity vs. whole-body dynamics; differing contact patterns; validation across diverse hardware.
These applications build on the paper’s core advances: automatic trajectory/gain library generation; apex-to-apex deadbeat stabilization using an actively controlled template with friction/feasibility constraints; two-step lookahead convergence analysis; and whole-body control augmented with reactive limb swinging and self-collision avoidance.
Glossary
- Angle of attack: The orientation of the leg at touchdown that influences stability and energy exchange in SLIP running. "they discovered a J-shaped dependency in the adjustment of the angle of attack to leg stiffness."
- Apex state: The state of the system at the highest point of the CoM trajectory, typically defined by velocities and height, used for return-map analysis. "For an apex state definition of a mapping function from one apex state to the next one can be defined as ."
- Apex-to-apex Jacobians: Derivatives of the apex-to-apex return map with respect to state and input, used to compute deadbeat gains. "apex-to-apex Jacobian estimations through an actively controlled system that resembles the whole-body dynamics well"
- Ballistic dynamics: Motion under gravity with no actuation, governing the flight phase between stance contacts. "The flight phase is fully ballistic and can be considered as a posture preparation for the following stance phase."
- BID: A running framework that provides closed-form, linear dynamics but requires manual timing parameter selection. "There are two running frameworks appearing with step adaptation capability: BID \cite{BID} and DCM-based running \cite{DCM}."
- Centroidal angular momentum: The aggregate angular momentum of the robot about its center of mass, crucial for whole-body balance. "The proposed model assumes that the centroidal angular momentum and additional limb controls are handled at the whole-body control level"
- Closed-kinematic chain systems: Robotic configurations where multiple limbs form kinematic loops, imposing additional constraints on motion. "also accounting for closed-kinematic chain systems, self collisions, and reactive limb swinging."
- Controllability analysis: An assessment of whether control inputs can drive the system to desired states, here across steps via back-integration. "we perform a controllability analysis of the point-mass dynamics and deadbeat control actions through back-integration"
- DCM-based running: A method leveraging the divergent component of motion to plan running with linear dynamics but requiring parameter preselection. "There are two running frameworks appearing with step adaptation capability: BID \cite{BID} and DCM-based running \cite{DCM}."
- Deadbeat control gain: A matrix mapping apex-state errors to leg state adjustments at touchdown to eliminate errors in one step. "This section aims to obtain deadbeat control gains through a model that resembles the full-order whole-body controlled system's CoM dynamics well in terms of control force feasibility."
- Deadbeat controller: A control law designed to drive the system to a desired state in a finite number of steps. "apex-to-apex deadbeat controllers to find out how the leg states (e.g., angle, stiffness, damping) should be modified to maintain stability and convergence during the next stance phase"
- Exponential stability: Convergence of the error dynamics at a rate proportional to the current error magnitude, ensuring rapid decay. "the closed-loop dynamics is exponentially stable:"
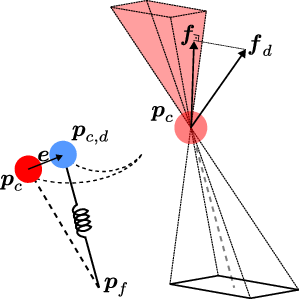
- Feasible polyhedral cone: The convex cone of ground reaction forces admissible given foot geometry and friction limits. "If the desired total control force is outside the feasible polyhedral cone, it is projected to the closest feasible solution."
- Feasible set: The set of forces or states that satisfy physical and contact constraints during stance. "a step adaptation must be performed to keep inside the feasible set to achieve stability and convergence."
- Flight phase: The no-contact phase where the robot’s motion is ballistic and the foot is repositioned for the next stance. "During the flight phase, the foot point is a function of , leg angles, hip distance, and leg length"
- Friction cone constraints: Inequalities ensuring the contact forces lie within friction limits to prevent slipping. "The positive ground reaction force and friction cone constraints are handled by \eqref{sc1} and \eqref{sc2}, respectively."
- Ground reaction forces: Forces exerted by the ground on the foot during stance, which drive floating-base dynamics. "As the floating base dynamics is driven by the ground reaction forces \cite{holonomy, CMM1, CMM2, wensing2023optimization}, they play a vital role in locomotion."
- Hybrid system: A system with dynamics that switch between continuous phases (stance) and discrete events (touchdown/liftoff). "SLIP exhibits many control challenges as it is a hybrid system with nonlinear stance dynamics"
- Inverse kinematics: The computation of joint or leg states that achieve a desired end-effector or CoM position. "The center of mass position at the touchdown is an inverse kinematics function of leg states \eqref{slipFootPointEq}"
- Jacobian (of the return map): The matrix of partial derivatives of the apex-to-apex mapping with respect to states or inputs. "where $\bm{J}_{x} = \partial P_{\text{active}/\partial\bm{x} \in \mathbb{R}^{3 \times 3}$ and $\bm{J}_{u} = \partial P_{\text{active}/\partial\bm{u} \in \mathbb{R}^{3 \times 3}$ are Jacobians of the return map evaluated at "
- Lateral leg angle: The leg’s angle in the lateral plane controlling side-to-side foot placement and lateral step width. "The most observable characteristic of points with different lateral leg angles is the overall shift in the axis"
- Liftoff: The event marking the end of stance, when the foot leaves the ground and the system enters flight. "A touchdown and liftoff condition separate the stance and flight phase dynamics such that the overall dynamics is given by"
- MuJoCo physics simulator: A high-performance physics engine commonly used for robotics simulation and control validation. "rejecting significant disturbances and uncertainties through the MuJoCo physics simulator."
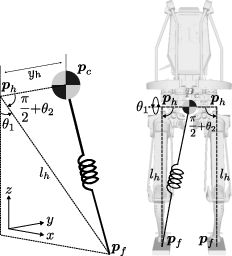
- Parasagittal plane: A plane parallel to the sagittal plane; here used to describe foot placement relative to the hip. "the foot is in the hip sagittal (parasagittal) plane."
- Poincaré section: A lower-dimensional slice of the system’s state space used to analyze periodic gait stability via discrete maps. "Selecting the apex state as the Poincar e section, a discrete mapping from one apex to the next one for the actively controlled point mass dynamics \eqref{slipStanceFootDynEq} can be defined as $P_{\text{active}:~(\bm{x}_{j}, \bm{u}_{j}) \rightarrow \bm{x}_{j+1}$"
- Reactive limb swing: A control strategy that adjusts limb motions based on base orientation errors to enhance stability. "We address this problem through a reactive limb swing control task that utilizes dynamic coupling between the links and the base frame orientation, thereby enhancing disturbance rejection capabilities."
- Return map: The discrete mapping from one apex state to the next, used for analyzing and controlling periodic motions. "are Jacobians of the return map evaluated at "
- SLIP (Spring-Loaded Inverted Pendulum): A simplified running model representing the CoM bouncing on a springy leg through stance and flight. "The spring-mass model, also known as the spring-loaded inverted pendulum (SLIP), was first introduced to model the steady-state running of animals and humans"
- Stance phase: The single-support phase when the foot is in contact with the ground and GRFs drive the motion. "During the stance phase, the robotic system drives its joints and the ground reaction forces such that the CoM and limbs track the desired trajectories."
- Step adaptation: The process of adjusting foot placement and trajectory selection in real time to meet foothold and stability constraints. "achieving step adaptation to run through random stepping stones is the main contribution of this paper."
- Template model: A reduced-order model capturing essential dynamics used to estimate control policies or gains. "an actively controlled template model that resembles the whole-body dynamics well"
- Touchdown: The event when the foot makes contact with the ground, setting initial conditions for the stance phase. "At the moment of touchdown, is fixed on the ground and sets an initial condition for the stance phase dynamics"
- Trajectory library: A precomputed set of periodic trajectories across parameter ranges, enabling rapid switching for adaptation. "A combination of different types of running can be stored in a trajectory library, allowing the robot to switch between different trajectories and adapt to changing environmental conditions."
- Virtual hip point: A modeled point used to define leg geometry and angles for mapping SLIP to humanoid morphology. "the virtual hip point is located at and it helps to decompose leg angles and into more intuitive quantities."
- Virtual leg: An abstract leg segment connecting the hip to the foot in the SLIP-to-humanoid mapping. "The virtual leg has a length of and connects the hip to the foot."
- Whole-body control (WBC): An inverse-dynamics framework coordinating multiple tasks (CoM, torso, limbs) subject to constraints. "Mapping spring-mass trajectories to a humanoid model through a whole-body control (WBC) framework also accounting for closed-kinematic chain systems, self collisions, and reactive limb swinging."
Collections
Sign up for free to add this paper to one or more collections.

