Flocking phase transition and threat responses in bio-inspired autonomous drone swarms
Abstract: Collective motion inspired by animal groups offers powerful design principles for autonomous aerial swarms. We present a bio-inspired 3D flocking algorithm in which each drone interacts only with a minimal set of influential neighbors, relying solely on local alignment and attraction cues. By systematically tuning these two interaction gains, we map a phase diagram revealing sharp transitions between swarming and schooling, as well as a critical region where susceptibility, polarization fluctuations, and reorganization capacity peak. Outdoor experiments with a swarm of ten drones, combined with simulations using a calibrated flight-dynamics model, show that operating near this transition enhances responsiveness to external disturbances. When confronted with an intruder, the swarm performs rapid collective turns, transient expansions, and reliably recovers high alignment within seconds. These results demonstrate that minimal local-interaction rules are sufficient to generate multiple collective phases and that simple gain modulation offers an efficient mechanism to adjust stability, flexibility, and resilience in drone swarms.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper explains how a group of small flying robots (drones) can move together smoothly and safely using very simple rules inspired by animals like fish and birds. The researchers show that by turning two “knobs” that control how much each drone copies its neighbors’ direction and how much it is attracted to them, the whole group can switch between different crowd behaviors. They discover a sharp “phase transition” between a loose, flexible group and a tight, well-aligned formation, and they test how these groups react when a “intruder” drone suddenly flies through them.
What questions were the researchers trying to answer?
To make the ideas easy to follow, here are the main goals of the study:
- Can a real drone swarm (not just in a computer) show a clear switch between two group behaviors: loose “swarming” and tight “schooling,” just by changing how strongly drones align and attract to their neighbors?
- How fast and how smoothly can the swarm switch back and forth between these two behaviors when the alignment “knob” is suddenly changed?
- Which behavior makes the swarm best at reacting to outside disturbances, like an intruder drone flying through them? Is there a “sweet spot” where the swarm is super responsive but still safe?
How did they do it?
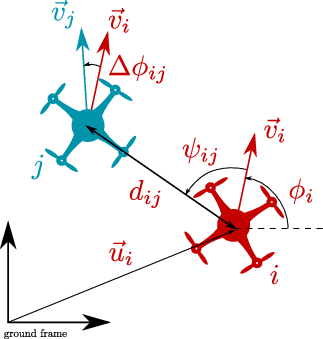
Think of each drone as a teammate that only pays attention to a few nearby teammates. Each drone uses two simple rules:
- Alignment: “Point your nose the same way as your most influential neighbors.”
- Attraction: “Stay near your neighbors so the group doesn’t fall apart.”
The strength of these two rules can be tuned like volume knobs:
- Alignment gain: how strongly you try to face the same way.
- Attraction gain: how strongly you try to stay near the group.
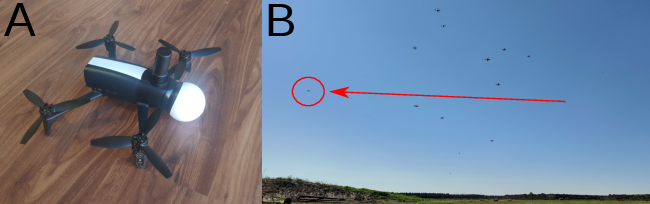
The team used both computer simulations and real outdoor tests with a swarm of 10 quadcopter drones. They tested many settings of these two gains and watched what happened to the group. To describe the group’s behavior, they used three simple measurements:
- Polarization: how well the group is pointing in the same direction (high means tight formation; low means everyone is going their own way).
- Dispersion: how spread out the group is (low means close together; high means scattered).
- Minimal inter-agent distance: the smallest distance between any two drones (important for safety).
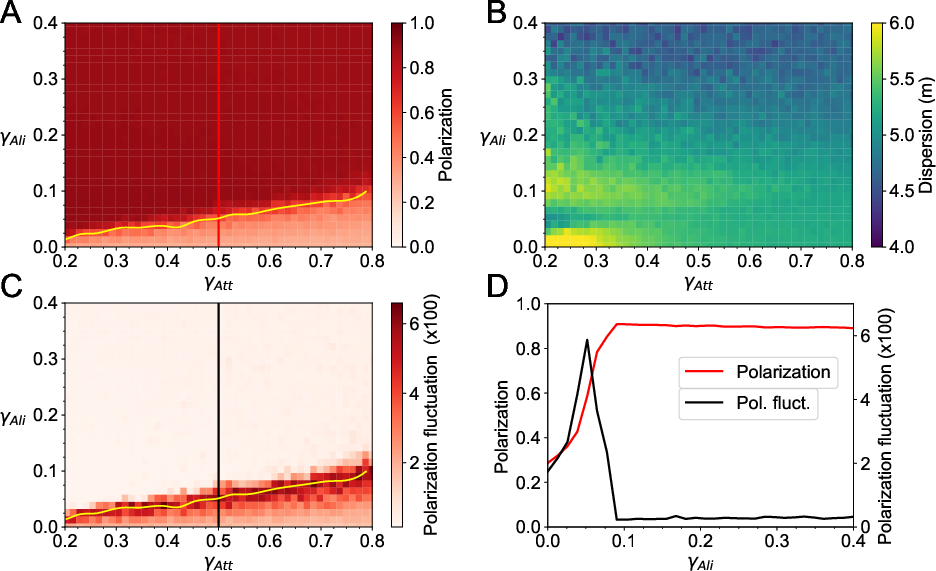
They mapped a “phase diagram”—a picture that shows which combinations of the two gains produce swarming, schooling, or the in-between zone. A “phase transition” is like water freezing or boiling: a small change in a control knob suddenly causes a big change in the group’s behavior.
What did they find?
Here are the most important results, explained simply:
- Two clear group phases: With low alignment, the drones form a compact but loosely organized cluster (swarming). With stronger alignment, they form a tight, well-directed formation (schooling).
- A sharp transition and a critical region: Between swarming and schooling is a narrow “critical region” where the swarm becomes highly sensitive. Small changes can cause big reactions. In this region:
- Polarization fluctuates a lot (the group’s direction can change quickly).
- The group reorganizes fast (it can turn and reshape itself in seconds).
- Susceptibility is highest (it is most responsive to disturbances).
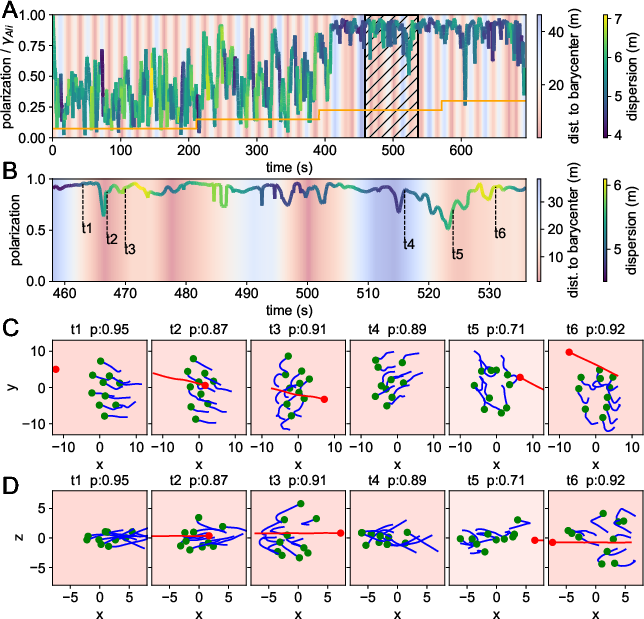
- Intruder response: When an intruder drone flies through the group:
- Near the critical region, the swarm can perform quick collective moves—like a rapid 180° turn or brief spreading out—and then recover strong alignment within a few seconds.
- In strong schooling, the group stays more stable but still avoids the intruder, often by expanding briefly and then returning to alignment.
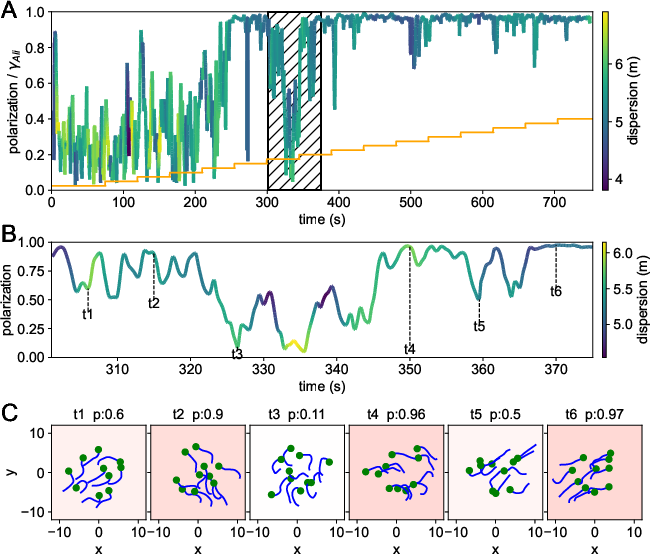
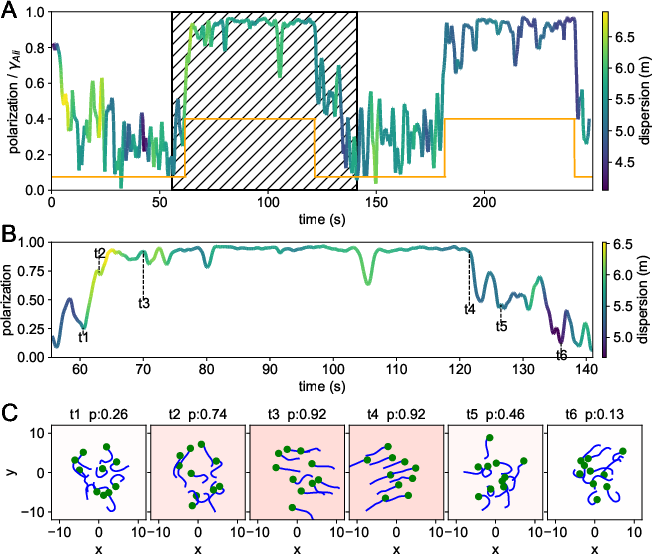
- Asymmetric switching: It’s faster to go from swarming to schooling (about 5 seconds) than to go from schooling back to swarming (about 15 seconds). In simple terms, forming a tight formation is easy once you turn up the alignment “knob,” but “relaxing” back into a loose group takes longer.
- Size matters: Bigger swarms need stronger alignment to achieve the same level of order. With more drones, low alignment leads to more spreading out.
- Real flights agree with simulations: Outdoor tests match the computer results very well, with small differences because the real world has wind, noise, and other small imperfections.
Why does this matter?
This study shows that complex, useful group behaviors can come from very simple local rules. By turning just two knobs—alignment and attraction—you can:
- Choose between stable, efficient travel (schooling) and flexible, exploratory movement (swarming).
- Operate near the critical region when you want maximum responsiveness—for example, during exploration, quick reorientation, or handling unexpected events.
- Switch modes on the fly depending on the mission: a high-alignment mode for transit or defense, and a lower-alignment mode for searching or adapting.
This has practical uses in search and rescue, environmental monitoring, security, and defense. It means future drone swarms could automatically adjust how they move as conditions change—staying safe, reacting fast to threats, and still keeping things simple and scalable.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The paper presents compelling experimental and simulation evidence for phase-like transitions in a bio-inspired drone swarm, but several aspects remain unaddressed or insufficiently explored. The following points identify concrete gaps, limitations, and open questions for future research:
- Scale-up beyond small swarms: Results are demonstrated with N=10 drones outdoors (and limited simulations for N=20); systematic validation across larger swarm sizes (e.g., N≥50–100) is missing, including how the critical region, saturation points, and dispersion trends scale with N.
- Finite-size and criticality analysis: The paper infers a “critical region” from polarization variance peaks but does not perform finite-size scaling, measure critical exponents, or quantify susceptibility via response functions; a rigorous statistical physics characterization is needed to confirm true phase-transition behavior vs. finite-size crossovers.
- Generality across attraction gains: Outdoor experiments fix γ_Att=0.5 while varying only γ_Ali; the full 2D phase diagram is not validated in the field across multiple γ_Att values or trajectories, limiting generalization of the phase-boundary claims.
- Reality-gap quantification: The shift in the empirical critical region (e.g., saturation around γ_Ali≈0.15 vs. simulations) is acknowledged but not quantified; a systematic identification of model error sources (wind, delays, sensing noise, actuation limits) and their contributions is needed.
- Flight-dynamics modeling fidelity: The simulator uses a first-order position response (τ≈1.119 s) calibrated from intruder trajectories; higher-fidelity models (including yaw/body dynamics, velocity-dependent effects, wind gusts, and downwash interactions) are needed to capture transient behaviors and alignment recovery more accurately.
- Aerodynamic interaction modeling: Vertical weighting (σ_z) is introduced in distance metrics to mitigate downwash-induced risks but is not validated experimentally; quantify how rotor wake interactions influence minimal inter-agent distance, especially during vertical splits near the critical region.
- Safety guarantees under perturbations: Minimal inter-agent distance decreases in the critical region and under intruder approaches; formal safety guarantees (provable lower bounds on separation, collision avoidance under worst-case stimuli) are not provided.
- Neighbor selection mechanism: “Influential neighbors” are referenced, but the influence metric I_ij and selection algorithm are truncated/not fully specified; define the computation, update rate, occlusion handling, robustness to noisy estimates, and computational scaling for large N.
- Decentralization vs. central mediation: Despite “local” rules, experiments rely on a ground control center and high-precision RTK GPS; the algorithm’s performance with fully onboard, decentralized sensing/estimation (e.g., vision-only, UWB, UVDAR) and ad-hoc V2V communications remains untested.
- Communication constraints and failures: The system uses 1 Hz telemetry and 2 Hz control updates; robustness to packet loss, variable latency, bandwidth limits, and partial network partitioning is not evaluated.
- Sensing modality generalization: Field results depend on centimeter-level RTK GPS; the algorithm’s efficacy and safety with degraded GPS, GPS-denied conditions, or purely onboard sensing (vision, lidar, radar) under occlusions and clutter is unknown.
- Environmental complexity: Tests occur in an open 50 m circular arena with no obstacles; performance in cluttered, confined, or urban environments with strong boundary effects and frequent obstacle avoidance remains unexplored.
- Wind and weather robustness: Flights were conducted with wind 18–22 km/h, gusts up to 33 km/h; the dependence of phase behavior, recovery times, and dispersion on varying wind regimes, turbulence, and weather conditions is not characterized.
- Intruder scenarios are limited: Only a single non-cooperative intruder at 10 m altitude is tested; responses to multiple simultaneous intruders, varied altitudes and approach geometries (including top-down), evasive/adversarial tactics, and obstacle-like intrusions are not assessed.
- Recovery-time statistics: Reported recovery times (≈5–6 s) are based on representative runs; distributions, confidence intervals, and dependence on γ_Ali, approach direction, and wind are not quantified across sufficient replicates.
- Asymmetric switching dynamics: The 3× asymmetry (≈5 s schooling formation vs. ≈15 s dispersion to swarming) is observed but not modeled; develop mechanistic or control-theoretic explanations (e.g., attractor structure, consensus hysteresis) and predictive models for transition times.
- Adaptive gain control: The paper proposes “collective gain control” as a concept but does not implement or evaluate closed-loop gain adaptation strategies (trigger conditions, sensing requirements, stability margins, safety constraints, mission-level logic).
- Heterogeneity and faults: All agents are treated as identical; the impact of heterogeneous dynamics, sensor/actuator variances, battery state, and agent dropouts/failures on phase behavior and resilience is unstudied.
- Task integration: Minimal rules prioritize coordination but do not encode task-level objectives; how to integrate path planning, target tracking, coverage, or search behaviors without degrading phase-dependent stability/responsiveness remains open.
- Metrics beyond polarization/dispersion: Information propagation speed, correlation lengths, formal susceptibility (e.g., d⟨P⟩/dγ_Ali), network connectivity metrics, and reaction-time distributions are not measured; richer diagnostics would clarify functional benefits of criticality.
- Border interactions and arena effects: Wall interaction terms are mentioned but omitted in equations; quantify how geofencing and border repulsion modify social interactions and shift phase boundaries, especially in confined spaces.
- Computation and scalability: Real-time neighbor influence computation and selection likely scales as O(N²); profiling, complexity reduction (e.g., spatial hashing), and performance bounds for large N are needed.
- Speed and actuation limits: Drone speed/turn-rate constraints are not varied; map how maximum speed and turn-rate bounds affect phase transitions and resilience (e.g., breakdowns reported in fixed-wing swarms when these are mismatched).
- Vertical coordination mechanisms: Vertical dispersion and splitting under intruder approach are documented but not mechanistically analyzed; study the role of γ_z, d0z, and l_z on vertical cohesion and its coupling to horizontal polarization near criticality.
- Statistical rigor in field data: Experimental durations vary by γ_Ali, with limited samples and noted outliers; standardized experimental protocols, balanced replicates, and statistical tests (e.g., ANOVA, bootstrap CIs) are needed to support phase-boundary claims.
- Data, code, and reproducibility: It is unclear whether datasets, calibration procedures, and ROS2 code are publicly available; open access resources would enable independent validation and extension.
- Cross-platform generalization: Results are limited to Parrot Bebop 2 quadrotors; validation on different multirotor platforms, fixed-wing, and hybrid UAVs would test the generality of the minimal-rule framework.
- Formal control-theoretic analysis: No Lyapunov stability, convergence proofs, or robustness margins are provided for the closed-loop system under the proposed social interactions and gain modulation; establish formal guarantees for stability and safety across operating regimes.
Practical Applications
Immediate Applications
Below are actionable use cases that leverage the paper’s validated gains-based flocking control, phase-transition mapping, and demonstrated field robustness with 10 drones. Each item includes sector links, potential tools/products/workflows, and key assumptions or dependencies.
- Adaptive perimeter surveillance with intruder response (security, public safety)
- What: Swarm patrol around facilities, events, or campuses that shifts from stable transit (schooling) to high-susceptibility alert posture (near-critical) to rapidly reorient and expand when an intruder approaches.
- Tools/products/workflows:
Phase-aware swarm controller(ROS2 node),criticality monitor(polarization/dispersion/susceptibility dashboard), gain schedules tied to intruder proximity/direction. - Assumptions/dependencies: RTK-GPS or equivalent high-precision localization; geofencing; line-of-sight; regulatory approval for multi-UAV operations.
- Rapid open-area search and rescue (SAR)
- What: Ten–twenty UAVs operate near the critical region to reorient quickly as leads change, then switch to schooling for fast transit between waypoints.
- Tools/products/workflows:
Gain schedulerthat toggles exploration vs transit modes; ROS2 bag logging for replay; simple neighbor selection to minimize comms load. - Assumptions/dependencies: Minimal obstacles; trained operators; reliable localization; weather tolerance; integration with SAR comms.
- Environmental hazard tracking (wildfire fronts, gas plumes) (environment)
- What: Use high susceptibility near the phase transition to quickly pivot and remap moving hazard edges; transient expansions help widen sensing coverage.
- Tools/products/workflows: Sensor payload integration (thermal, gas, particulate);
hazard-responsive gain schedulelinked to plume dynamics. - Assumptions/dependencies: Payload weight and power limits; endurance; airspace coordination with emergency services.
- Event drone shows and aerial cinematography (entertainment/media)
- What: Robust schooling for formation choreography; controlled swarming/critical-state transitions to yield dynamic effects; reliable recovery after disturbances (e.g., unexpected intrusions).
- Tools/products/workflows:
Phase-aware choreographertool that sequences gain changes; ROS2-based show control; live health metrics (polarization, dispersion). - Assumptions/dependencies: RTK-GPS; show control integration; strict safety perimeters; local regulations.
- Small-site infrastructure inspection (energy/utilities)
- What: Use schooling for tight, safe formation inspections; temporarily enter near-critical region to reorient around localized disturbances or wind gusts.
- Tools/products/workflows:
Inspection modewith altitude/spacing constraints (σz weighting); gain modulation triggered by anomaly detection. - Assumptions/dependencies: BVLOS authority (if needed); obstacle maps; payload constraints (RGB/thermal/LiDAR).
- Protective escort “bubble” around moving assets (public safety/defense)
- What: Swarm maintains a protective, cohesive shell; near-critical operation enables fast collective turns/expansions when a threat approaches from different angles.
- Tools/products/workflows:
Threat-response moduleintegrating ADS-B/vision intruder sensing; sector-based gain modulation by approach direction. - Assumptions/dependencies: Reliable intruder detection; rules-of-engagement; radio spectrum coordination; high-precision positioning.
- Academic testbed for collective criticality and phase transitions (academia/education)
- What: Reproduce phase diagrams, measure susceptibility and recovery to intrusions; study asymmetric switching (5 s schooling vs ~15 s swarming).
- Tools/products/workflows: Open ROS2 simulation with calibrated flight model (τ ≈ 1.119 s);
phase-diagram mappingscripts; reproducible experiments with 10–20 drones. - Assumptions/dependencies: Access to RTK-capable drones or motion capture; outdoor test site; ethics and safety protocols.
- Agricultural scouting (agtech)
- What: Multi-UAV crop scouting toggles schooling (transit between fields) and near-critical swarming (fast reorientation to anomalies).
- Tools/products/workflows:
Field scouting workflowwith gain presets per acreage/terrain; NDVI/RGB payload integration. - Assumptions/dependencies: Open fields; compliance with local UAV regulations; RTK-GPS or RTK base.
Long-Term Applications
These are use cases that build on the paper’s methods but require further research, scaling, sensing upgrades, certification, or policy development.
- City-scale logistics swarms (delivery, urban mobility)
- What: Phase-aware formations for transit and highly responsive behavior near obstacles/adversarial agents; collective gain control adapts stability vs agility.
- Tools/products/workflows:
Swarm OSwith automated gain scheduling based on urban context; UTM/U-space integration; sense-and-avoid. - Assumptions/dependencies: BVLOS certification; dense obstacle navigation; robust onboard estimation beyond GPS; high-reliability comms.
- Anti-UAS defense and area denial (defense/public safety)
- What: Swarms that rapidly reorient to intercept and herd intruders; exploit high susceptibility for fast collective turns and coordinated blocking.
- Tools/products/workflows:
Swarm interceptormodule; distributed perception (RF/vision); safety and ethics gating. - Assumptions/dependencies: Legal/ethical approval; robust high-speed flight dynamics; adversarial robustness; secure autonomy.
- Emergency communications mesh and sensor networks (communications/IoT)
- What: Aerial swarm forms reconfigurable mesh nodes; near-critical operation maximizes responsiveness to link failures and demand hotspots.
- Tools/products/workflows:
Phase-aware mesh managerbalancing alignment (link stability) vs susceptibility (rapid topology changes). - Assumptions/dependencies: Payload radios; spectrum management; endurance; autonomous docking/charging.
- Corridor-scale cooperative inspection (pipelines, powerlines, rail) (energy/infrastructure)
- What: Hundreds of drones in schooling for efficient linear coverage; local near-critical pockets to pivot around detected anomalies/obstacles.
- Tools/products/workflows:
Corridor inspection plannerwith sectorized gain schedules; automated anomaly triage and swarm re-tasking. - Assumptions/dependencies: BVLOS; robust obstacle avoidance; large-scale fleet management; data fusion pipelines.
- Vision-only or markerless neighbor estimation to remove GPS (robotics/software)
- What: Replace RTK with UVDAR/markerless vision and onboard state estimation to scale cost-effectively and operate GPS-denied.
- Tools/products/workflows:
Vision-based neighbor selectorandcriticality estimatorfrom onboard cameras; hardware sync. - Assumptions/dependencies: Reliable relative localization at high rates; low-light/weather resilience; compute budgets; calibration.
- Persistent environmental sensing swarms (environment/climate)
- What: Long-endurance, solar-charging swarms that adaptively reconfigure around evolving phenomena (plumes, fronts) using gain control.
- Tools/products/workflows:
Adaptive environmental swarmwith autonomous gain scheduling linked to sensor stimuli and meteorological models. - Assumptions/dependencies: Endurance/charging infrastructure; severe-weather robustness; autonomous base stations; policy for long-term deployments.
- Cross-domain extensions (underwater, maritime, space robotics)
- What: Apply minimal local rules and phase-aware gain control to AUV swarms, surface vessels, or distributed space robots.
- Tools/products/workflows: Domain-adapted interaction kernels (hydrodynamics/communications delays);
phase-state monitors. - Assumptions/dependencies: Medium-specific localization (acoustic/visual/radar); domain physics modeling; endurance.
- Warehouse and factory multi-robot coordination (industrial automation)
- What: Ground robots use schooling for high-throughput transit and near-critical swarming for rapid reconfiguration to bottlenecks or disruptions.
- Tools/products/workflows:
Phase-aware fleet coordinatorintegrated with WMS/MES; safety envelopes via polarization/min-distance metrics. - Assumptions/dependencies: Indoor localization; interoperability; safety certification; human–robot interaction protocols.
- Certification and policy frameworks for swarm safety (policy/regulation)
- What: Standardize safety metrics (polarization, dispersion, minimal distance), operating envelopes, and test protocols for phase-aware swarms.
- Tools/products/workflows:
Criticality-aware safety envelopeguideline; scenario-based validation (intruder tests, switching asymmetry). - Assumptions/dependencies: Regulator engagement; harmonization with ASTM/ISO standards; remote ID and UTM integration.
- Consumer multi-drone kits for creative media (daily life/media)
- What: Affordable swarm filming systems that automate formation transitions via gain modulation and recover quickly from disturbances.
- Tools/products/workflows:
Creator-friendly swarm appwith presets (schooling/swarming), auto safety margins, real-time health metrics. - Assumptions/dependencies: Simplified setup; local compliance; reliable onboard sensing; user education.
Glossary
- Akima1DInterpolator: A spline-based interpolation method that produces smooth, differentiable curves suitable for estimating velocities. "We use the Akima1DInterpolator from the SciPy library, which offers a key advantage over linear interpolation by producing a continuous function that passes through the original data points and can be analytically differentiated to obtain velocity estimates."
- Alignment gain: A control parameter that scales the strength of agents’ tendency to align their headings. "defined by a fixed attraction strength () and systematically varying alignment gain between $0.025$ and $0.4$."
- Attractor: In dynamical systems, a set of states toward which trajectories tend to evolve. "where ordered phases form cohesive attractors that slow the return to disordered motion"
- Attraction gain: A parameter that scales the strength of agents’ tendency to move toward neighbors or desired positions. "Using only two control parameters, the alignment and attraction gains and , we were able to generate a broad repertoire of collective states"
- Barycenter: The geometric center of the swarm’s positions used as a reference point. "the intruder approached the swarm barycenter from a distance of 25\,m"
- Consensus-based reinforcement: Stabilization arising from consensus dynamics that reinforce a shared state. "due to consensus-based reinforcement"
- Critical region: The parameter zone near a phase transition where fluctuations and responsiveness peak. "highlighting the so-called critical region."
- Criticality: The property of being at or near a critical point where small perturbations can produce large effects. "with associated notions of order parameters, susceptibility, and criticality that predict how small perturbations can trigger large-scale reorganizations"
- Cucker–Smale model: A flocking model where agents align velocities via distance-dependent interaction weights. "Vicsek and CuckerâSmale families of models"
- Decentralized control: A control approach where each agent acts locally without a central coordinator. "Large-scale field experiments have begun to show that bio-inspired decentralized control can be realized outside laboratory conditions."
- Differential corrections: Reference-station-based adjustments that improve GNSS positioning accuracy. "enabling centimeter-level positioning through differential corrections provided by a ground reference station."
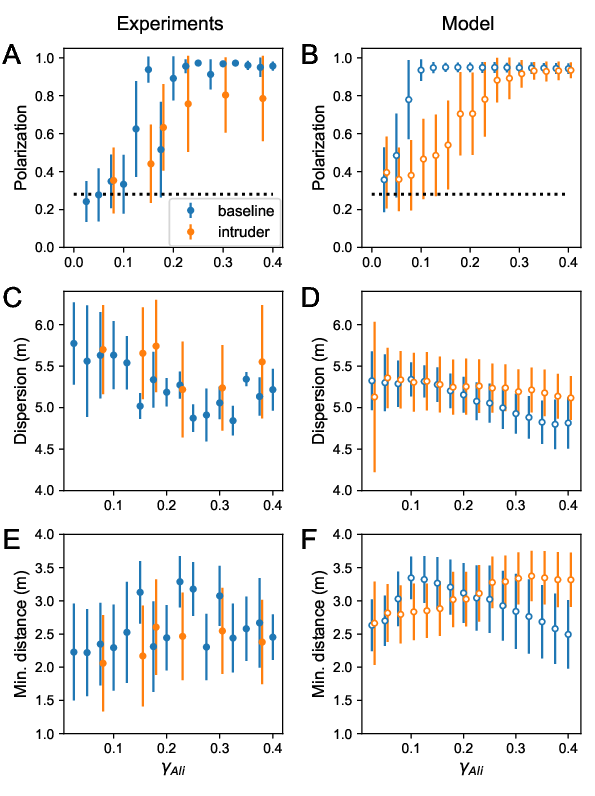
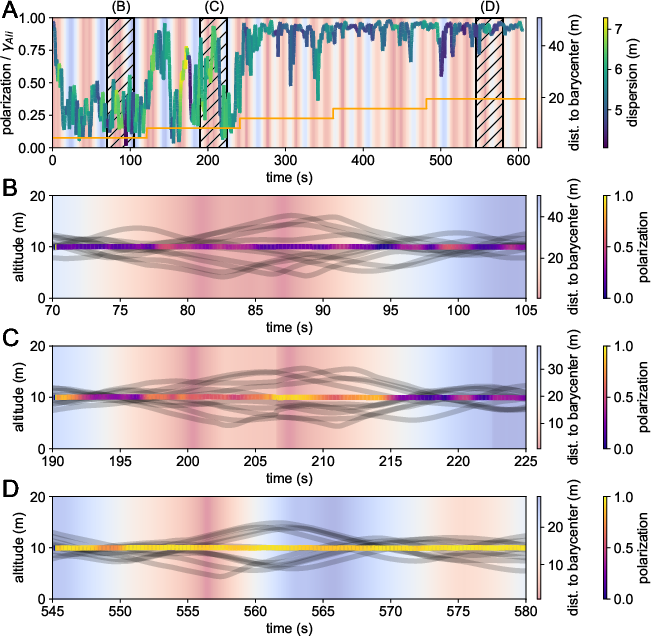
- Dispersion: A measure of the spatial spread of agents in the swarm. "Swarm polarization (A,B), dispersion (C,D), and minimal inter-agent distance (E,F) calculated along 3D."
- Escape waves: Propagating collective avoidance maneuvers triggered by threats. "that resemble escape waves in natural systems"
- First-order response model: A dynamic model with a single time constant capturing delayed system response. "A first-order response model captured the delay between a commanded and an achieved position:"
- Flight-dynamics model: A mathematical model that simulates the motion and constraints of the aerial platform. "combined with simulations using a calibrated flight-dynamics model"
- Geofencing: Virtual boundaries that restrict where drones may fly. "to enforce geofencing restrictions that prevent drones from leaving the authorized flight volume."
- GPS-denied: Operation in environments without reliable GPS signals. "decentralized GPS-denied swarms where weak coupling increases the risk of drift"
- Hysteresis: Asymmetric transition behavior where the path of change depends on history. "transitions between leaders and followers exhibit comparable hysteresis"
- Least-squares fitting: A parameter estimation method minimizing the sum of squared errors. "Least-squares fitting (SciPy, Python) yielded $1.119$\,s."
- Minimal inter-agent distance: The smallest distance between any pair of agents, relevant for collision safety. "Swarm polarization (A,B), dispersion (C,D), and minimal inter-agent distance (E,F) calculated along 3D."
- Model-predictive control: An optimization-based control strategy using a predictive model to plan actions over a horizon. "embedding flocking rules in model-predictive or optimization frameworks improves safety and performance in cluttered environments"
- Order parameter: A quantitative measure of collective order (e.g., alignment) used to characterize phases. "with associated notions of order parameters, susceptibility, and criticality"
- Phase diagram: A map of collective states as a function of system parameters. "By systematically tuning these two interaction gains, we map a phase diagram revealing sharp transitions between swarming and schooling"
- Phase transition: An abrupt change between distinct collective states as parameters vary. "reveal a clear phase transition between the swarming and schooling states"
- Polarization: The degree of alignment of agents’ velocities; an order parameter for coherence. "Heatmaps show the average polarization (A)"
- Polarization fluctuations: Variability in polarization indicating instability or sensitivity. "polarization fluctuations (C)"
- ROS2: A middleware framework for robotics providing communication and tooling for distributed systems. "Swarm control is implemented within the ROS2 framework."
- ROS2 Bag: The ROS2 logging format for recording messages and states. "all state variables and control messages are logged using ROS2 Bag for subsequent post-processing and analysis."
- Savitzky–Golay filter: A smoothing filter using local polynomial least squares to reduce noise without phase lag. "a SavitzkyâGolay filter is applied to smooth the data without introducing temporal lag."
- Schooling: A highly aligned, cohesive collective motion state. "Schooling: a highly aligned and cohesive state."
- Susceptibility: The sensitivity of the system’s order parameter to perturbations. "consistent with the increased susceptibility expected near a critical point"
- Swarming: A compact but weakly aligned collective motion state. "Swarming: a compact but weakly aligned state."
- Time constant: A parameter defining the speed of response in first-order systems. "where is the droneâs position, its desired position, and the time constant."
- Transect: A line through a diagram or space used to analyze variation across parameters. "we focused on a transect of the phase diagram (see Figure~\ref{fig:phase-diagram}D), defined by a fixed attraction strength () and systematically varying alignment gain "
- Ublox F9P: A high-precision GNSS receiver supporting differential corrections. "the original GPS module was replaced with a Ublox F9P receiver, enabling centimeter-level positioning through differential corrections"
- Vicsek model: A classic self-propelled particle model describing alignment-driven collective motion. "Vicsek and CuckerâSmale families of models"
Collections
Sign up for free to add this paper to one or more collections.