- The paper introduces a novel Theory of Environment that extends traditional Theory of Mind by enabling counterfactual simulation of hidden environmental dynamics.
- It details a structured typology distinguishing factive from counterfactual inferences, emphasizing how human motor control unbinds low-dimensional constraints to foster innovation.
- The findings underscore potential advances in meta-generative models for robotics and lifelong learning by detecting convergence failure and expanding inference spaces.
Counterfactual Simulation in Social Goal Inference: From Theory of Mind to Theory of Environment
Introduction
"From Theory of Mind to Theory of Environment: Counterfactual Simulation of Latent Environmental Dynamics" (2601.01599) investigates the computational basis of open-ended behavioral innovation in humans. The paper argues that, while vertebrate motor control is characterized by dimensionality-reducing strategies for efficient performance, humans uniquely possess mechanisms for inferring latent environmental affordances, which can drive expansion in behavioral and motor complexity. Central to the thesis is the extension of the Theory of Mind (ToM) framework to encompass a "Theory of Environment" (ToE), a hypothesis generation process that supports prospective innovation through counterfactual simulation not only of agent states but of environmental dynamics themselves.
Motor Control, Dimensionality Reduction, and the Exploration Problem
The vertebrate motor system solves a complex inverse problem: controlling hundreds of muscles and joints in high-dimensional configuration space to achieve behavioral goals. The solution, as articulated through "muscle synergies," is to constrain variability, reducing the search space via coordinated patterns and thus favoring reliable control but at the expense of creativity and behavioral innovation. This low-dimensional manifold, while evolutionarily robust, impedes exploration of novel action–outcome contingencies, particularly in environments saturated with latent, unobserved affordances.
The exploration of such open-ended spaces is risky due to the multiplicative (geometric mean) nature of fitness in evolutionary learning, making random exploration an evolutionarily suboptimal risk. Thus, non-human primates and other vertebrates typically exhibit restricted behavioral repertoires, not because of computational deficits, but because of these selection pressures.
Human Behavioral Innovation and Socio-Cognitive Cueing
Recent literature highlights that the hallmark of human behavior is its open-ended variability, supporting cumulative culture and complex tool use. The argument forwarded is that humans uniquely can "unbind" the acquired dimensionality-reducing constraints of motor control, thereby opening up broader search spaces when environmental cues indicate untapped affordances. Skill acquisition research corroborates that increased exploration and variability can catalyze higher-level performance.
However, the "teleological depth" of an environment—the density and richness of latent actionable goals—cannot be directly inferred without costly exploration. The paper posits that social cues, embedded in the cultural environment, serve as indirect indicators of teleological depth, guiding when to expand the search space. This meta-representational reasoning leverages shared computation with ToM but targets environmental, rather than mental, hypotheses.
A Four-Fold Typology of Social Goal Inference
The paper presents a structured 2×2 typology distinguishing modalities of social goal inference along two axes: the requirement for counterfactual (vs. purely factive) representations, and the scope of goal inference (in-distribution vs. out-of-distribution with respect to the observer's hypothesis space).
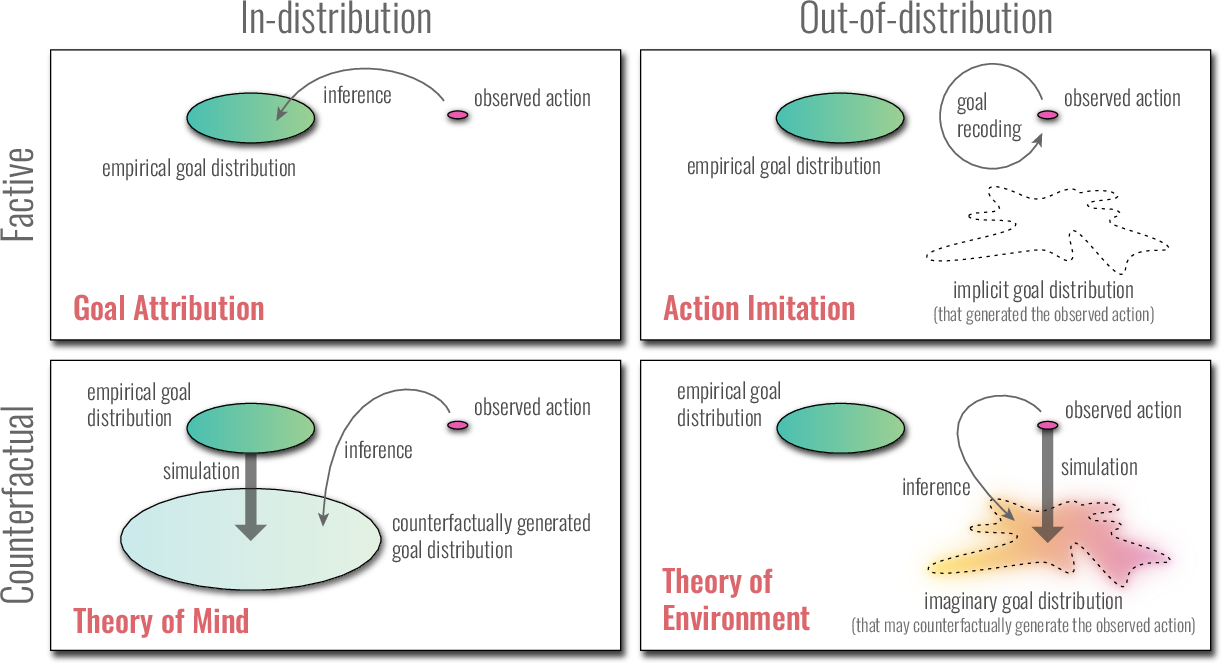
Figure 1: Four modalities of social goal inference, identifying structural variation along two representational dimensions: (a) factive vs. counterfactual, and (b) in- vs. out-of-distribution, i.e., whether inference is constrained to known goals or extends to novel environmental hypotheses.
The typology distinguishes:
- Goal Attribution: Factive, in-distribution inference—inferring goals directly from observed action within known affordances.
- Theory of Mind (ToM): Counterfactual, in-distribution inference—requiring simulation of hidden agent states but still bounded by the observer's prior; implemented in IRL algorithms that are infeasible for out-of-distribution inference.
- Action Imitation: Factive, out-of-distribution—enables sample-efficient learning via encoding observed actions as new goals, but lacks generative flexibility.
- Theory of Environment (ToE): Counterfactual, out-of-distribution inference—upon convergence failure of ToM, observers hypothesize unobserved environmental dynamics, leveraging counterfactual simulation to posit latent affordances and drive unbounded motor exploration.
Of note is that ToE and ToM share cognitive machinery (e.g., counterfactual generativity), diverging at the locus of uncertainty: ToM targets the agent, ToE targets the environment.
Theoretical and Practical Implications
The development of ToE mechanisms aligns with evolutionary accounts of cumulative, open-ended culture, and may underlie the cognitive substrate for advanced skill acquisition, technological innovation, and meta-learning in humans. Algorithmic analogues to ToE are absent or underdeveloped in existing RL and goal inference literature, which typically operate over closed hypothesis spaces and falter in complex, ecologically valid scenarios. The ToE framework motivates research into meta-generative models capable of proposing and verifying out-of-distribution environmental hypotheses, with implications for autonomous agents, robotics, and lifelong learning.
Moreover, the transition from ToM to ToE leverages the detection of "convergence failure" (i.e., inability to account for observed behavior using available hypotheses), thus acting as a meta-cognitive switch for expanding the space of affordances considered. This dynamic search over model/hypothesis space resonates with abduction and imagination, suggesting shared neural and computational substrates.
Prospects for Computational and Cognitive Modeling
Future directions include formalizing ToE computationally: developing agents that detect model inadequacies and generate new goal hypotheses grounded in counterfactual simulation of latent environmental variables. Deep RL, inverse RL, and hierarchical meta-learning architectures would benefit from mechanisms that parallel the "unbinding" of motor constraints hypothesized in ToE. Additionally, empirical investigation should target neurocognitive correlates of ToE processes and their developmental trajectory, especially as they pertain to cumulative culture and innovation.
Conclusion
The paper advances the claim that uniquely human behavioral innovation is undergirded by a novel form of social goal inference—Theory of Environment—that extends counterfactual simulation beyond mental state attribution to inference of hidden environmental dynamics. This mechanism provides a computational route for detecting and exploiting the teleological depth of an environment, supporting open-ended skill acquisition and cultural evolution. The ToE concept broadens the scope of current models of goal inference and highlights new frontiers for research into the origins and computational realization of human creativity and exploration.