- The paper introduces PiDR, a deep learning architecture that integrates strapdown INS equations to suppress drift in inertial navigation.
- It achieves up to 75% and 94% error reduction on mobile robots and underwater vehicles, demonstrating significant performance gains.
- The model robustly combines supervised loss with physics-based residuals, ensuring physical consistency and improved endpoint accuracy.
Introduction
Autonomous platforms require robust navigation capabilities in environments where external positioning aids, such as GNSS or visual odometry, are unavailable. Pure inertial navigation systems (INS), relying exclusively on IMUs, intrinsically suffer from solution drift over time due to sensor noise and integration errors. Traditional model-based methods are unable to mitigate this drift in long-term, GNSS-denied scenarios, especially when using low-cost sensors. Recent advances in deep learning (DL) have shown improved inertial navigation performance; however, black-box networks struggle to generalize with limited labeled data and often fail to preserve physical consistency. Physics-Informed Neural Networks (PINNs) offer a hybrid paradigm, embedding governing inertial dynamics directly into learning frameworks, increasing both interpretability and reliability.
This paper introduces PiDR, a physics-informed inertial dead-reckoning architecture explicitly embedding strapdown INS motion equations in the neural network training process. PiDR enhances physical plausibility of learned navigation states and enables transparent, model-constrained dead reckoning amenable to resource-limited autonomous platforms.
PiDR targets estimation of position, velocity, and orientation for autonomous platforms using raw inertial measurements—even in the absence of external supervision or correction. The core methodology involves recasting classical INS kinematic and dynamic equations into differential and algebraic constraints and integrating these as residual terms within a composite loss function. This loss couples: (i) a supervised term penalizing deviations from ground-truth (when available), and (ii) a physics-informed residual enforcing strapdown navigation consistency over sensor data and collocation points.
The network architecture is a feedforward, fully-connected DNN mapping time-stamped IMU measurements (specific force, angular velocity) to navigation states, trained via stochastic optimization (AdamW) with gradient clipping and dropout regularization. Automatic differentiation facilitates calculation of time derivatives and constraint residuals during training. The trade-off between supervised and physics-based losses is managed via tunable hyperparameters, enabling robust learning both in strongly supervised and weakly labeled regimes.
Experimental Evaluation
ROSbot XL Mobile Robot
PiDR’s efficacy is validated on a wheeled mobile robot dataset, leveraging multiple sensor configurations and distinct IMU placements. Training is performed on two reference trajectories (R1, R4) totaling 11 minutes, and testing is conducted on unseen circular and rectangular trajectories (R2, R3, R5, R6; 20 minutes total) collected with different IMUs, thoroughly assessing generalization.
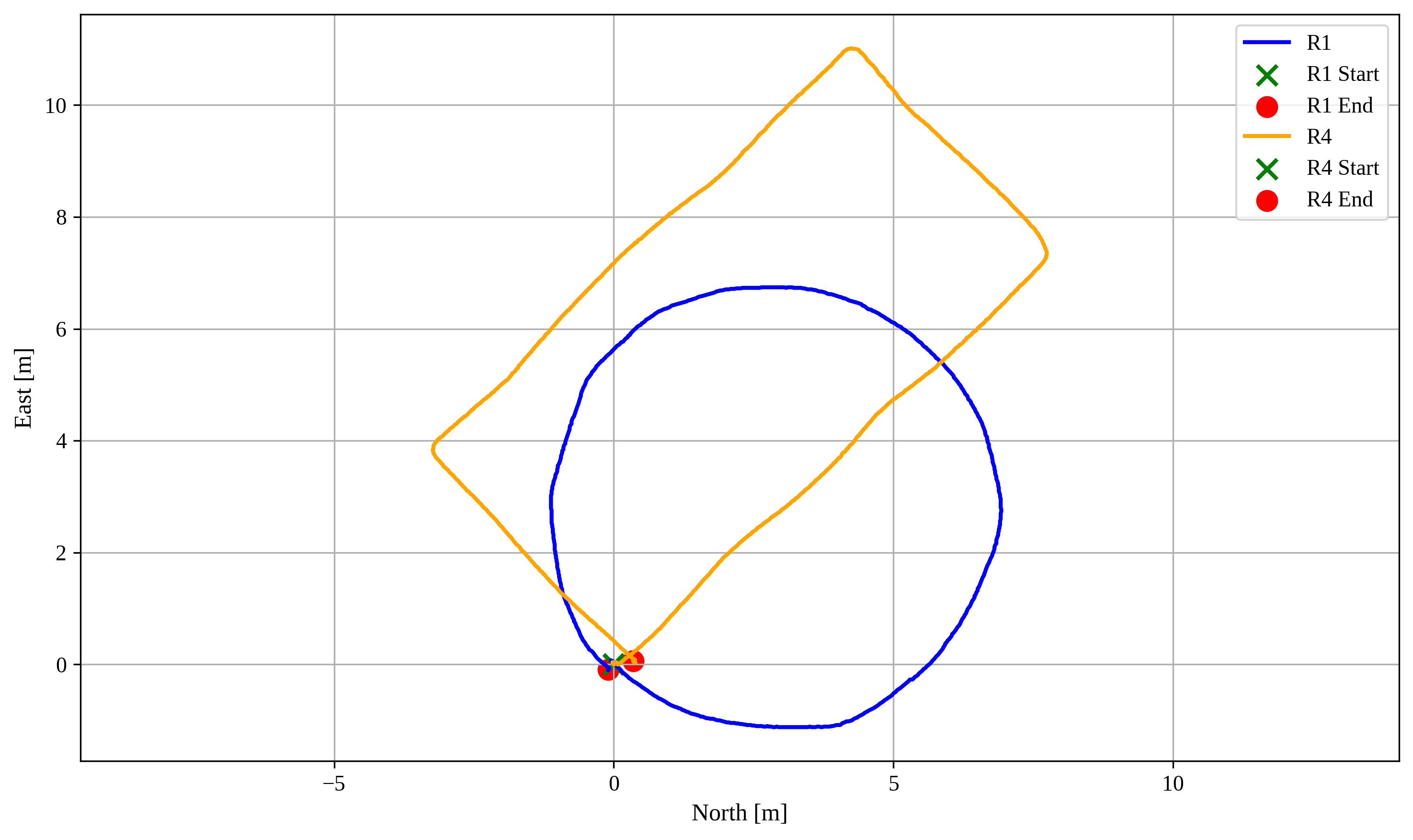
Figure 1: ROSbot XL trajectories used for training of PiDR (Trajectories R1 and R4).
Quantitative results indicate severe INS drift (PRMSE > 8 m, TDE > 28%) and substantial error magnitudes for MoRPI and MoRPI-PINN baselines. PiDR achieves a mean PRMSE of 2.1 m and MATE of 1.9 m, yielding up to 75% reduction in trajectory errors relative to conventional model-based methods. The global consistency, evaluated via final distance error (FDE) and trajectory drift, is notably enhanced. The architecture exhibits strong resilience to variations in motion type and sensor placement.
Autonomous Underwater Vehicle (AUV) Validation
Testing PiDR on Snapir AUV data, collected in the Mediterranean over diverse, long-duration 3D trajectories (T10, T11, T13; >20 min), provides a challenging benchmark for underwater navigation.
Figure 2: Snapir AUV during the mission in the Mediterranean Sea, Haifa, Israel.
Training spans seven unique AUV trajectories, encompassing complex maneuvers and high-curvature paths.
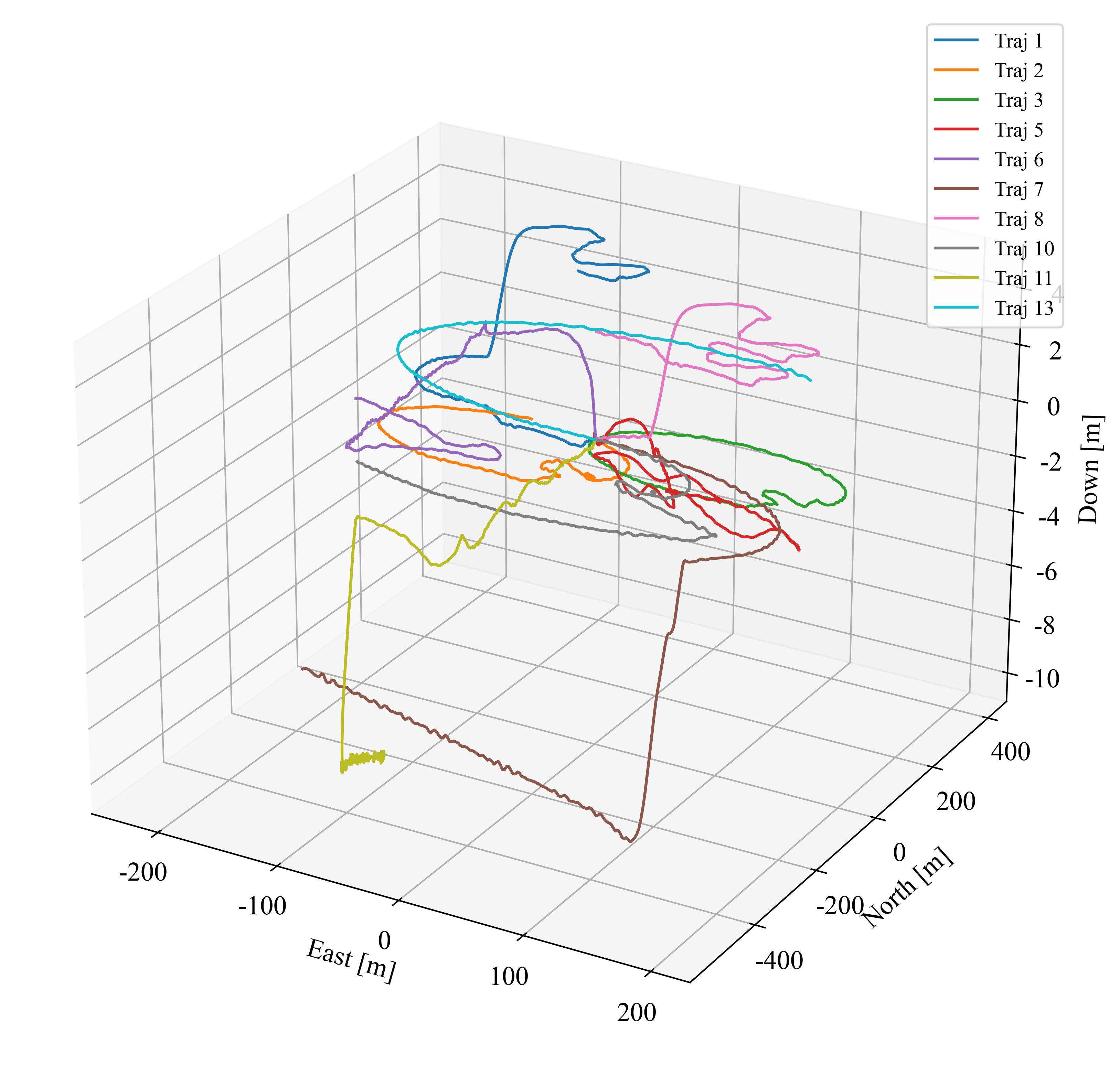
Figure 3: AUV trajectories in the NED frame. Trajectories T1, T2, T3, T5, T6, T7, and T8 belong to the training set, and T10, T11, and T13 are part of the testing set.
Baseline INS and MoRPI approaches exhibit catastrophic drift (PRMSE > 500 m, TDE > 170%). MoRPI-PINN yields moderate improvements (PRMSE ≈ 250 m). Critically, PiDR improves endpoint accuracy by over 94% (average PRMSE 14.5 m, FDE < 12 m, TDE < 6%). These results validate PiDR as a platform-agnostic navigation model—maintaining stability over extended missions, even in hydrodynamically perturbed environments.
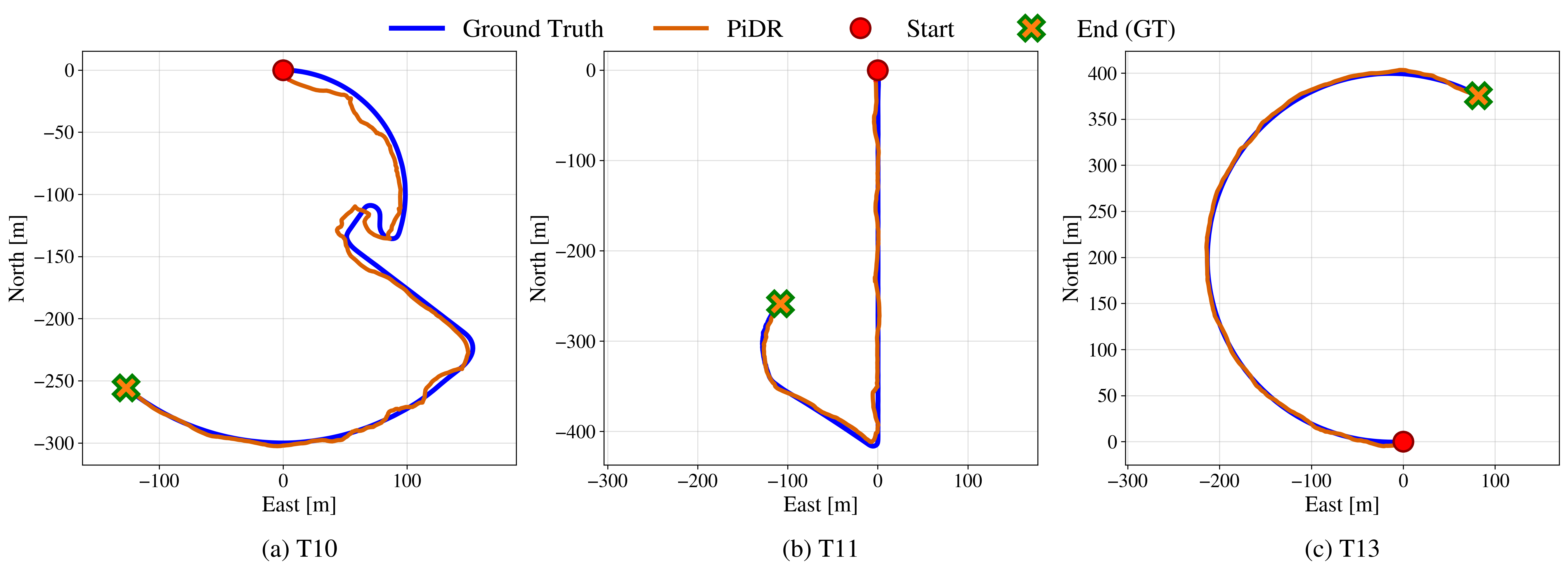
Figure 4: Comparison of GT and PiDR estimated trajectories (N--E) for AUV.
Analysis and Discussion
The physics-informed architecture establishes strong physical priors, suppressing nonphysical drift and enhancing generalization. Comparative ablation reveals that models ignoring explicit physics constraints or using naive geometric regularization (MoRPI) fail under aggressive or ambiguous dynamics, while PINN-enforced models retain stability and accurate endpoint localization.
Strong numerical claims include:
- >29% improvement for both ground robots and underwater vehicles across all trajectory metrics
- FDE reduction from >1 km to <12 m on AUV missions, directly impacting operational feasibility in long-term deployments
PiDR’s lightweight structure and transparent enforcement of inertial dynamics make it amenable to real-time deployment on resource-constrained platforms. By leveraging both limited labeled data and physical motion regularization, PiDR bridges the gap between traditional deterministic navigation approaches and contemporary DL architectures—enabling robust, interpretable, and physically consistent localization in fully autonomous scenarios.
Implications and Future Directions
Practically, PiDR is applicable to search-and-rescue robotics, marine survey, security operations, and any autonomous mission requiring accurate navigation in GNSS-denied regimes. Theoretically, this architecture motivates further research into physics-informed domain adaptation, dynamic loss balancing, and task-driven network compression. Extending PiDR with self-supervised learning over unlabeled trajectories or integrating environmental context (e.g., magnetic, pressure) may improve performance under multi-modal disturbances.
This work affirms the utility of embedding governing physical principles in DL models for navigation and localization, and is likely to influence future physics-informed AI approaches in safety-critical robotics and autonomous vehicle systems.
Conclusion
The PiDR framework establishes a unified, physics-informed neural model for pure inertial dead reckoning across diverse autonomous platforms. Demonstrated improvements in accuracy, drift suppression, and robustness are evidenced on both planar and three-dimensional trajectories using real-world datasets. PiDR’s explicit integration of inertial navigation principles into learning architectures enables transparent, interpretable, and platform-agnostic navigation solutions in GNSS-denied environments. Anticipated future developments include scalability to heterogeneous sensor modalities, reduced training data requirements, and further improvements in real-time onboard deployment for autonomous robotics.