Conformal Point and the Calibrated Conic
Abstract: This gives some information about the conformal point and the calibrating conic, and their relationship one to the other. These concepts are useful for visualizing image geometry, and lead to intuitive ways to compute geometry, such as angles and directions in an image.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper introduces two simple, visual tools you can draw on top of a photo to understand how the camera saw the scene:
- The calibrating conic: a real curve in the image (a circle or ellipse) that captures the camera’s settings.
- The conformal point: a special point in the image that helps you read true angles on a flat surface (like a floor) just by drawing lines.
Together, they turn camera math into pictures you can see and measure with a ruler, instead of long equations. You can use them to estimate angles, field of view, camera tilt, and even help a robot figure out how it rotated while moving on a flat floor.
Key questions the paper answers
- Can we show a camera’s calibration (its internal settings) as a shape you can see in an image?
- Can we measure angles in the 3D world by doing simple drawings in the photo?
- Can these drawings replace tricky algebra in practical tasks like finding field of view, camera tilt, or doing robot odometry on a flat plane?
How the paper approaches this
The paper uses straightedge-and-compass style geometry—no heavy algebra. It relies on everyday image features:
- Vanishing points: where parallel lines seem to meet in a picture (like road edges meeting at the horizon).
- The horizon line of a plane: the “vanishing line” of a flat surface (e.g., the ground plane).
- The principal point: roughly the image center where the camera looks straight ahead.
- The focal length: how “zoomed in” the camera is.
Two key tools are built from these:
- The calibrating conic
- Imagine all viewing directions that are exactly 45° away from the camera’s straight-ahead direction. Their image points trace a conic (a circle if pixels are square and there’s no skew; otherwise an ellipse).
- This conic can be drawn in the image and encodes the camera’s internal parameters in a visual way.
- The conformal point (for a given plane and its horizon)
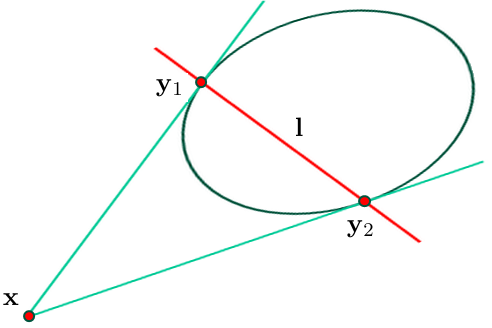
- This is a special point in the image with a magic property: if two lines lie on that plane in the real world, the angle between them equals the angle you draw between their lines to the conformal point in the image. So you can measure true world angles with a protractor right on the image.
The paper also explains geometric constructions (step-by-step drawings) to:
- Build the calibrating conic from known directions (like two or three orthogonal vanishing points).
- Find the conformal point from the conic and the horizon (and vice versa).
- Measure angles using either the conformal point or the conic directly.
Main findings and why they matter
1) The calibrating conic makes calibration visible
- What it is: the image of all 45° rays from the camera’s optical axis.
- What it looks like:
- Circle centered at the principal point if pixels are square and there’s no skew.
- An axis-aligned ellipse if pixels are rectangular.
- A tilted ellipse if there is skew.
- Why it’s useful:
- You can “read” camera settings from the shape: center gives principal point, size relates to focal length, tilt hints at skew/aspect ratio.
- It gives an intuitive way to see the camera’s field of view: points on the conic are at 45° off-axis, so the image width or diagonal seen from the conformal point/center gives FOV angles.
- Perpendicular directions can be found via a simple helper line construction tied to the conic (no need to crunch formulas).
Practical payoffs:
- From two or three known directions (like vertical and two orthogonal horizontals), you can construct the conic and thus calibrate visually.
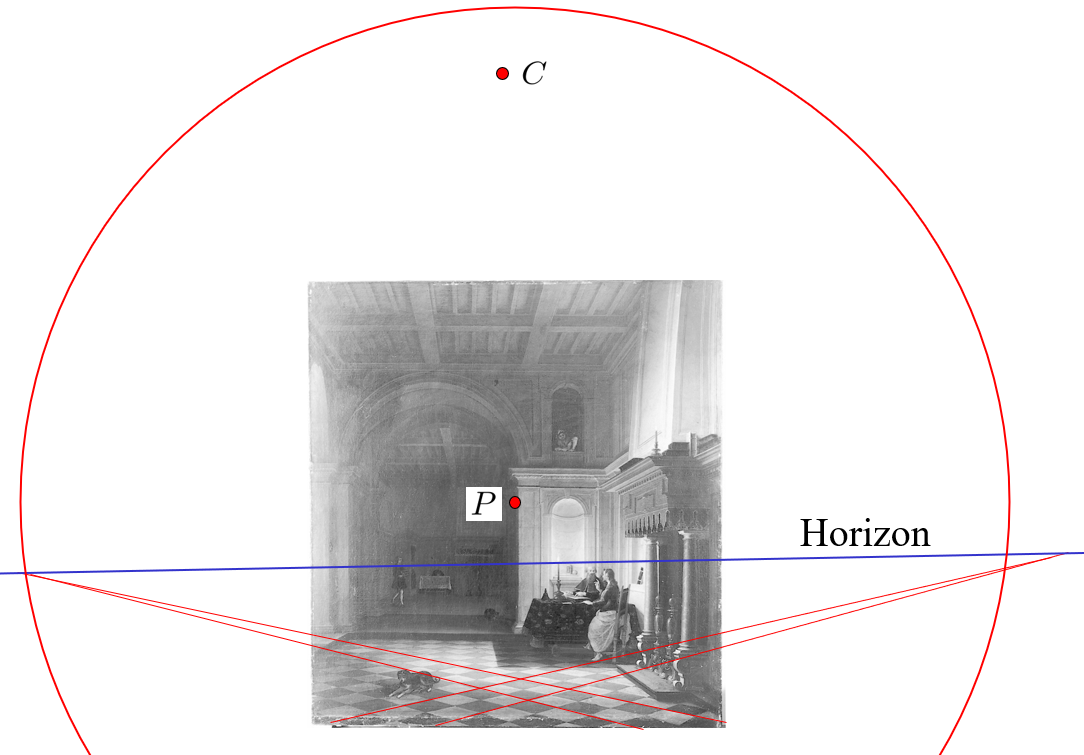
- You can overlay the conic on real images, street scenes, or even paintings to interpret the viewpoint.
2) The conformal point lets you measure true angles on a plane
- Setup: pick a plane in the scene (e.g., a tiled floor) and its horizon line in the image.
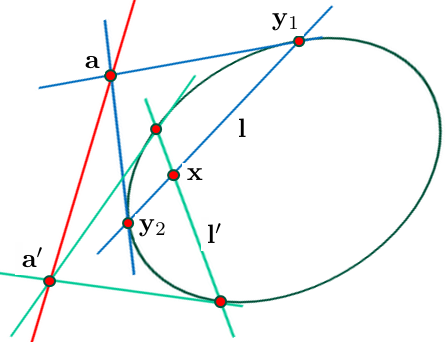
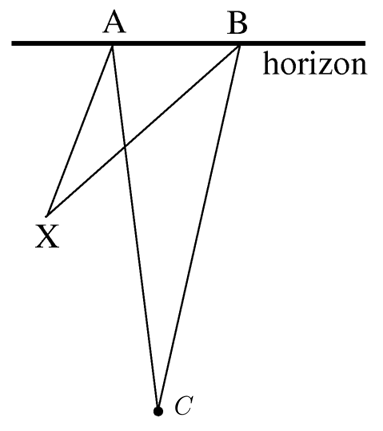
- Property: If two lines lie on that plane, extend them to meet the plane’s horizon at points A and B. Then draw lines from A and B back to the conformal point C. The angle A–C–B you measure in the image equals the true angle between the lines in the real world.
- How to find C:
- It lies on the line perpendicular to the plane’s horizon through the principal point.
- Its distance from the horizon depends on the focal length and how far the principal point is from the horizon.
- There’s a neat geometric construction using the calibrating conic: draw a radius parallel to the horizon to touch the conic; use that distance to draw a circle that intersects the perpendicular through the principal point at the conformal point.
Practical payoffs:
- Measure real angles between lines on a floor or wall directly in the image.
- If the principal point is on the same line as two rays you care about (e.g., left and right edges), the conformal point lies on the conic and measuring the angle is especially easy.
- You can compute camera tilt relative to a plane: the tilt equals the angle between the principal point ray and the perpendicular to the horizon, measured using the conic.
3) Fast angle measurement using the conic alone
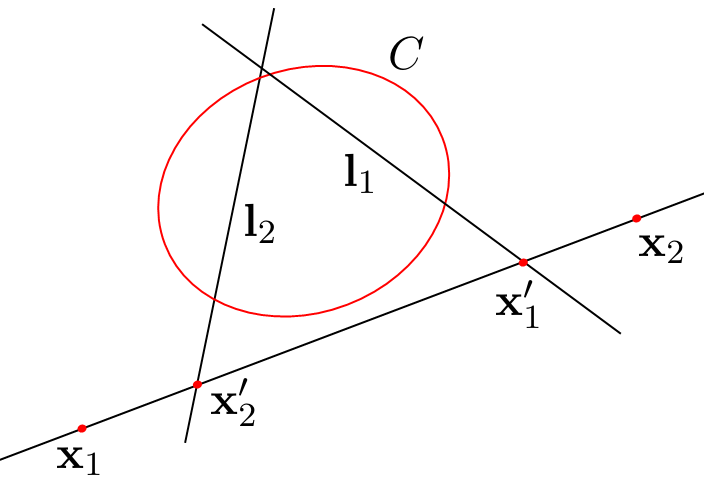
The paper also shows a purely conic-based construction: draw helper lines (called polars) linked to each point to find where perpendicular directions must lie. With a couple of intersections and distances along a line, you can compute the angle between two rays—again, with geometry, not algebra.
4) Worked examples
- Tiled floors: The grid gives orthogonal vanishing directions and a horizon, making it easy to build the conic and measure FOV and tilt.
- Outdoor scenes: Road intersections are often perpendicular. Two road vanishing points plus the horizon let you calibrate and estimate FOV.
- Paintings: You can “calibrate” a painting’s perspective. The conic shows where a viewer should stand to see the painting with the artist’s intended perspective, and reveals the field of view and tilt implied by the painter’s geometry.
5) Planar odometry (robot self-rotation on flat ground)
- If a camera moves on a flat plane (like a robot rolling on a floor), the plane’s horizon and the conformal point stay fixed in the image (as a set).
- You can match points across frames and, using the fixed horizon/conformal point, estimate how much the robot has rotated between images.
- After you know rotations, translations can be found with simple linear steps. This offers a clear, geometry-first way to do odometry without heavy optimization.
Why this matters
- Intuitive: Instead of staring at a 3×3 calibration matrix, you get a picture—a circle or ellipse—that shows you what the camera is doing.
- Practical: Quickly estimate angles, field of view, and camera tilt. Calibrate from ordinary scenes (roads, floors) or analyze perspective in artworks.
- Friendly to learning systems: Because the tools are visual and geometric, they may align well with how humans (and possibly neural nets) pick up patterns.
- Useful in robotics and AR: Robust, simple constructions can help with camera pose, navigation on flat surfaces, and overlaying graphics with the right perspective.
In short, the paper turns abstract camera calibration into hands-on geometry. With just a few lines and circles, you can see and measure the hidden math of images.
Knowledge Gaps
Below is a concise, actionable list of the paper’s unresolved knowledge gaps, limitations, and open questions to guide future research.
- Empirical validation missing: no quantitative experiments comparing accuracy and robustness of calibrating-conic/conformal-point methods against standard calibrations (e.g., Zhang), on real datasets with ground truth.
- Noise and outlier robustness: no algorithms or analyses for robustly estimating vanishing points, horizons, principal points, calibrating conics, and conformal points from noisy, cluttered images (e.g., RANSAC variants, uncertainty modeling, confidence intervals).
- Lens distortion unaddressed: all constructions assume a pinhole model without radial/tangential distortion; methods to compensate or jointly estimate distortion with the calibrating conic/conformal point are not provided.
- General calibration (skew, non-square pixels): many derivations (especially for the conformal point and the Riemannian argument) assume square pixels and zero skew; a complete treatment for general (skew and arbitrary aspect ratio) and the corresponding definition/location of the conformal point is missing.
- Principal point estimation: several constructions assume the principal point is known/central; a principled, robust procedure to estimate it from multiple angle/vanishing constraints (with guarantees and uncertainty) is not developed.
- Ambiguity of the two conformal points: practical criteria/algorithms to choose the correct conformal point (above vs. below the horizon) in noisy real images are not specified.
- Edge/degenerate configurations: behavior and remedies are not discussed for cases such as horizon outside the image, near-frontal views (horizon at infinity), very small field of view, nearly coincident vanishing directions, or points nearly collinear with the principal point.
- Error propagation: no sensitivity analysis (closed-form Jacobians, Monte Carlo) quantifying how errors in vanishing points, horizon, principal point, or conic parameters affect angle, tilt, and FOV estimates.
- Numerical stability/conditioning: no implementation details for stable computation of reflected polars, cross-ratios, and intersections under finite precision and near-degenerate configurations.
- Automation pipeline: the paper emphasizes ruler-and-compass constructions but does not provide an automated, end-to-end system to detect requisite primitives (lines, VPs, horizons) and overlay the calibrating conic/conformal point without manual intervention.
- Comparison to IAC pipeline: a systematic theoretical and empirical comparison (accuracy, computational cost, failure modes) between calibrating-conic/conformal-point workflows and IAC-based methods is missing.
- Wide-FOV and non-central cameras: extensions to fisheye, catadioptric, or rolling-shutter cameras are not addressed; conditions under which the constructs remain valid or how to adapt them are open.
- Beyond single planes: while angle measurements on a plane are treated, a broader framework for multiple planes (multiple horizons) and consistency constraints across them is not developed.
- Multi-view generalization: the paper hints at odometry but does not present a multi-view theory using the conformal point/conic for full calibration or joint optimization (e.g., bundle adjustment with geometric constraints).
- Odometry section incomplete: the outlined planar-motion odometry lacks a concrete estimator for pairwise rotations from general point matches, treatment of parallax/non-planar structure, rotation averaging details, and empirical evaluation.
- Riemannian derivation gaps: the “conformal at one point” claim is sketched but lacks a complete derivation (explicit Jacobian, uniqueness proof) and generalization to non-square pixels/skew.
- Construction from known non-orthogonal angles: the method referencing a “θ-angle circle” lacks a concrete, noise-robust algorithm and analysis (existence/uniqueness conditions, stability) in practical images.
- Learning integration: despite motivation, no differentiable formulations, synthetic supervision strategies, or empirical demonstrations of using these constructs as priors/losses in deep models are provided.
- Calibration of artworks: procedures to cope with artistic deviations from strict projective geometry (hand-drawn inaccuracies, non-planar elements) and to quantify resulting uncertainty are not developed.
- Practical guidelines and tooling: the paper does not specify minimal data requirements, quality thresholds, or provide reproducible code/tools for practitioners to apply the constructions reliably.
- Physical units and viewing geometry: while suggesting the correct viewing position for paintings, the conversion from pixel geometry to physical viewing distance/position (with units) and required assumptions (sensor size, pixel pitch) is not formalized.
- Real-world non-idealities: effects of motion blur, rolling shutter, low resolution, and compression artifacts on the constructions and recommended preprocessing are not discussed.
- Proof omissions: certain claims (e.g., sign of cos θ via side-of-line tests) are left as exercises; fully rigorous, self-contained proofs would strengthen reliability.
- Identifiability with limited cues: uniqueness and stability of the calibrating conic from incomplete direction sets (e.g., only two vanishing directions, or inexact orthogonality) are not analyzed; constraints to resolve ambiguities are not formalized.
- Integration into standard pipelines: concrete recipes to use calibrating conics/conformal points for initializing , regularizing bundle adjustment, or aiding Manhattan-world detection, and the measurable benefits thereof, remain open.
Glossary
- Absolute conic: A theoretical conic in projective geometry used to reason about camera calibration and Euclidean properties; its image under projection is the IAC. "homographies, absolute conics, trifocal tensors"
- Aspect ratio: The ratio of pixel width to height; if not 1 (non-square), it affects the shape of the calibrating conic. "If the pixels are rectangular with non-square aspect ration, then the calibrating conic is an axis-aligned ellipse."
- Camera centre: The optical center of the camera; rays through image points pass through it. "given two rays passing through the camera centre"
- Calibrating conic: A real conic in the image that encodes the camera’s intrinsic calibration and enables geometric constructions. "The calibrating conic gives the calibration of the camera"
- Calibration matrix: The 3×3 upper-triangular intrinsic matrix K describing focal length, principal point, and skew. "where $\m K$ is the calibration matrix of the camera, a upper triangular matrix."
- Conformal mapping: A mapping that preserves angles locally (up to scale). "a conformal mapping is one that preserves angles."
- Conformal point: A special image point (relative to a line or a plane’s horizon) at which projected angles equal true scene angles. "The conformal point was introduced in the paper"
- Cross-ratio: A projective invariant of four collinear points used here to compute squared cosine of an angle via distances. "this expression is the cross-ratio of collinear points ."
- Differential: The linear map (push-forward) induced by a differentiable function at a point, mapping tangent vectors between spaces. "The {\em differential} of at , is a linear map"
- Dolly zoom: A cinematographic effect changing perspective by simultaneous zoom and dolly motion, mentioned in perspective perception context. "the famous “Hitchcock zoom” or “dolly zoom” effect"
- Euclidean inner products: Standard dot-product metrics on tangent spaces; used to define Riemannian metrics g and h. "the usual Euclidean inner products on ."
- Field of view: The angular extent of the scene seen by the camera; can be read using the calibrating conic. "Computing the field of view using the calibrating conic."
- Focal length: The distance from the camera center to the image plane along the principal ray; denoted f. "The length is the focal length "
- Homography: A projective transformation between planes; used in planar calibration and invariance arguments. "under homographies of images of a planar calibration object"
- Homogeneous coordinates: Projective coordinates for points/lines enabling conics and incidences to be expressed algebraically. "in homogeneous coordinates"
- Horizon line: The vanishing line of a plane in the image (also line at infinity for that plane). "This is called the {\em horizon line} for the plane."
- Image of the absolute conic (IAC): The conic in the image plane represented by ω = (K Kᵀ)⁻¹, central to angle computations and calibration constraints. "as an alternative to the image of the absolute conic (IAC) to express the calibration of a camera."
- Imaginary conic: A conic with no real points; the IAC is such, making it invisible in the image. "a purely imaginary conic"
- Invariance: A property of the IAC that it is unchanged under camera rotations and translations. "A basic property of the IAC is that it is invariant both to translation and rotation of the camera."
- Jacobian: The matrix of first derivatives representing the linearization of a mapping at a point. "the Jacobian of at "
- Line at infinity: The set of vanishing points of all directions within a plane; coincides with the plane’s horizon in the image. "otherwise known as the horizon or line at infinity in the plane."
- Multiview geometry: The study of geometric relations across multiple images/cameras. "knowledgeable in multiview geometry"
- Odometry (self-odometry): Estimating a platform’s motion from its own sensors; here, using image geometry under planar motion. "self-odometry of a moving vehicle, or robot."
- Orthocentre: The intersection point of a triangle’s altitudes; used in constructing the calibrating conic from three vanishing points. "at the orthocentre of the triangle formed by three vanishing points"
- Polar (with respect to a conic): The line associated to a point relative to a conic; key to angle and orthogonality constructions. "the {\em polar} of the point with respect to the conic."
- Principal point: The projection of the camera center onto the image plane; center of the calibrating conic for square pixels. "centre at the principal point of the image."
- Principal ray: The optical axis direction through the principal point; used in special angle constructions. "in the same plane as the principal ray"
- Projective mapping: A bijection preserving straightness and cross-ratios; models plane-to-image projections. "This is a bijective projective mapping."
- Pull-back: The induced inner product/metric on the domain via a mapping and the target’s metric. "the pull-back of by "
- Push-forward: The mapping of tangent vectors via the differential. "the push-forward of tangent vector."
- Reflection (through the centre of the calibrating conic): The transformation S that reflects points across the conic’s center, used to define reflected polars. "represents reflection of a point through the centre of the calibrating conic."
- Riemannian metric: A smoothly varying inner product on tangent spaces that defines lengths and angles on manifolds. "We equip and with Riemannian metrics and "
- Rotation averaging: A procedure to reconcile pairwise rotation estimates into a globally consistent set. "As a subsequent step, $2$D rotation averaging can be used"
- Skew: The non-orthogonality of image axes in the calibration; appears as an off-diagonal intrinsic parameter. "skew parameter"
- Square pixels: Pixels with equal width and height; simplifies calibration so the calibrating conic is a circle. "For images with square pixels, the calibrating conic is a circle"
- Tangent space: The vector space of directions at a point on a manifold, used in differential constructions. "we denote the tangent spaces by and "
- Trifocal tensor: A 3-view projective entity encoding point/line correspondences across three images. "trifocal tensors"
- Vanishing direction: The direction in 3D whose parallel lines project to a vanishing point in the image. "vanishing directions"
- Vanishing line: The line containing all vanishing points of directions within a plane in the scene (the horizon). "The IAC may also be used to determine the angle between two lines lying on a plane in space. For this, it is also necessary to identify the vanishing line of the plane (in the image)."
- Vanishing point: The image point where projections of a set of parallel 3D lines in a given direction meet. "These are the points in the image corresponding to particular directions in space"
Practical Applications
Immediate Applications
The following applications can be deployed today using the paper’s geometric constructions (calibrating conic, reflected polars, conformal point) and standard vanishing-point detection. They leverage simple ruler-and-compass workflows or lightweight algorithms (e.g., line detection + RANSAC), and offer explainable, visual alternatives to purely algebraic calibration.
- Camera quick-calibration from a single image with lines/planes
- Sector: Software (computer vision), AEC (architecture/engineering/construction), Manufacturing, Imaging QA
- Tools/products/workflows:
- OpenCV/ROS module or Photoshop/Blender/QGIS plugin to detect vanishing points, draw the calibrating conic, and recover intrinsics (focal length, principal point, skew/aspect) from orthogonal vanishing directions or known-angle pairs
- Factory-line QA overlay to visually validate zero-skew and pixel aspect ratio
- Assumptions/dependencies:
- Sufficient straight lines; at least two known orthogonal directions on a plane (or a known angle); square-pixel or known pixel aspect; principal point known or estimated; no strong rolling-shutter distortions
- Measuring true angles on a plane directly in the image using the conformal point
- Sector: AEC, Forensics, Civil/Traffic engineering, Sports analytics, Education
- Tools/products/workflows:
- “Angle-measure” mode that constructs the line’s conformal point and returns the true in-plane angle (no calibration target needed)
- Broadcast sports telestration: measure corner kicks, play angles on fields assumed planar
- Assumptions/dependencies:
- Lines lie on a common world plane; horizon (vanishing line) and two vanishing points (or a known angle) obtainable; square pixels or known intrinsics
- Field-of-view (FOV) and camera tilt estimation from a single image
- Sector: Photography/Media, Drones, Security cameras, AEC
- Tools/products/workflows:
- Live overlay (mobile or camera firmware) showing calibrating conic; computes horizontal/vertical/diagonal FOV and tilt relative to a reference plane (e.g., ground)
- On-set cinematography tool to keep level and manage FOV without full calibration
- Assumptions/dependencies:
- Estimated principal point and focal length; visible horizon or orthogonal vanishing directions
- AR alignment and metric overlays without dedicated calibration targets
- Sector: AR/VR, Mobile apps, Real estate/interior design
- Tools/products/workflows:
- Single-image AR placement tool: detect horizon and vanishing points, compute conformal point, and render angle-accurate overlays (e.g., furniture layout on floors/walls)
- Assumptions/dependencies:
- Planar surfaces present with detectable line structure; stable intrinsics; square pixels or known intrinsics
- Robotic/vehicle planar self-odometry: rotation estimation from pairs of images
- Sector: Robotics (AGVs/AMRs, warehouse), ITS/dashcams, Drones near-planar flight
- Tools/products/workflows:
- ROS node that precomputes the horizon and conformal point once, then estimates inter-frame yaw from matched image features; follows with linear translation recovery
- Assumptions/dependencies:
- Motion constrained to a plane (fixed horizon); fixed intrinsics; enough feature matches; modest roll/pitch; square pixels or known intrinsics
- Cultural heritage and museum display: correct viewing position and perspective analysis
- Sector: Arts/Cultural heritage, Education, Museum tech
- Tools/products/workflows:
- Curator’s tool overlays the calibrating conic and horizon on paintings to compute ideal viewing distance/height and tilt; public-facing AR guide for visitors to “stand here” for correct perspective
- Assumptions/dependencies:
- Painting employs linear perspective; sufficient straight lines to find vanishing points; principal point approximated from composition or symmetry
- Forensic image interpretation and evidence QA
- Sector: Public safety, Insurance, Legal/Forensics
- Tools/products/workflows:
- Toolkit to verify camera orientation and angle measurements on road scenes (e.g., intersection orthogonality) and to document calibration assumptions via the visible calibrating conic overlay
- Assumptions/dependencies:
- Visible line structure; chain-of-custody documentation for any assumptions (principal point, pixel aspect, tilt)
- Education and training in multiview geometry
- Sector: Academia, EdTech
- Tools/products/workflows:
- Classroom labs and interactive notebooks that use the calibrating conic and conformal point to teach camera intrinsics, angle measurement, cross-ratios, and conformality; ruler-and-compass exercises
- Assumptions/dependencies:
- Basic line detection or manual construction; example images with clear vanishing structure
- Dataset curation and calibration QA for vision pipelines
- Sector: Software/ML (Autonomy, Mapping, Photogrammetry)
- Tools/products/workflows:
- Batch overlay to flag images whose implied conic reveals intrinsics drift, skew errors, or principal-point shifts; gatekeeping for training data
- Assumptions/dependencies:
- Consistent imaging hardware; availability of line-rich images for periodic checks
Long-Term Applications
These concepts can seed new algorithms, standards, and products once integrated into learning-based pipelines or scaled to diverse conditions (rolling shutter, fisheye, low-texture scenes, non-square pixels, heavy lens distortion).
- Neural modules that predict horizon, conformal point, and calibrating conic
- Sector: Software/ML, Robotics, AR
- Tools/products/workflows:
- Self-supervised losses from angle consistency and cross-ratio geometry; plug-in heads for VO/SLAM networks to stabilize intrinsics and rotations using explainable geometric cues
- Assumptions/dependencies:
- Training data with synthetic/weak labels; robust line/vanishing-point detection under occlusions; generalized distortions handled in-network
- SLAM/VO frameworks that use conformal-point constraints for rotation priors
- Sector: Robotics, Autonomous driving, Drones
- Tools/products/workflows:
- Back-ends that treat the conformal point and horizon as persistent factors for planar segments, improving rotation robustness when features are sparse or during motion blur
- Assumptions/dependencies:
- Scene has recurring planar structure; inertial cues optional but helpful; calibration drift manageable
- Standardized camera self-calibration protocols and metadata
- Sector: Policy/Standards, Public safety, Enterprise IT
- Tools/products/workflows:
- Procurement standards and NIST-like guidelines to store “calibrating conic” metadata or on-device overlays for body cams, traffic cams, and industrial cameras; routine visual QA
- Assumptions/dependencies:
- Stakeholder agreement; interoperability formats; legal acceptance of geometric overlays as calibration evidence
- Museum/venue AR platforms for “correct perspective” viewing experiences
- Sector: Cultural heritage, Entertainment
- Tools/products/workflows:
- Visitor apps or smart signage aligning the viewer to the ideal viewpoint; dynamic projection mapping that compensates for off-axis viewing
- Assumptions/dependencies:
- Reliable detection on varied artworks; robust UX in crowded spaces; device pose sensing
- Urban planning and civil inspection from ad hoc photos
- Sector: Gov/Infrastructure, AEC
- Tools/products/workflows:
- City-scale tools that infer curb angles, road grades, and intersection orthogonality using conformal-point geometry across citizen or inspector photos
- Assumptions/dependencies:
- Quality control on crowd-sourced imagery; standardization of plane assumptions; automated line extraction at scale
- Smartphone OS-level APIs for angle-accurate guidance and safety
- Sector: Mobile, Consumer
- Tools/products/workflows:
- System camera services exposing horizon/conformal point for auto-level, FOV budgeting, and “keep perspective” during zoom/dolly operations (reducing motion sickness in video)
- Assumptions/dependencies:
- Low-latency detection; integration with stabilization/rolling-shutter correction; energy constraints
- Autonomous-driving fallback odometry on structured roads
- Sector: Automotive/ITS
- Tools/products/workflows:
- Fallback rotation-only (or rotation-first) VO on planar road segments using lane markings/curbs; robustness in degraded visual conditions
- Assumptions/dependencies:
- Visible road-line geometry; integration with IMU/GNSS; handling elevation changes (non-planarity)
- Reconstruction pipelines regularized with angle constraints
- Sector: Photogrammetry, Mapping
- Tools/products/workflows:
- Use of conformal-point-based angle measurements on dominant planes as soft constraints to stabilize bundle adjustment and reduce drift in weakly textured scenes
- Assumptions/dependencies:
- Accurate plane segmentation; consistent line detection; distortion models incorporated
- Human-in-the-loop geometry editing interfaces
- Sector: Creative tools, CAD, Media
- Tools/products/workflows:
- “Angle brush” and “vanishing editor” that snap to conformal geometry for precise edits, layout, and relighting in single-image 3D workflows
- Assumptions/dependencies:
- Intuitive UI; real-time feedback; compatibility with existing DCC tools
- Robotics self-calibration and drift monitoring via conic stability
- Sector: Robotics, Industrial automation
- Tools/products/workflows:
- Monitor changes in the estimated calibrating conic over time to flag intrinsics drift, mechanical looseness, or temperature-induced changes; schedule maintenance proactively
- Assumptions/dependencies:
- Occasional views with sufficient line structure; logging and thresholding policies
Notes on common assumptions and dependencies
- Scene requirements: Presence of straight lines and at least one dominant plane (ground/wall/floor); availability of orthogonal directions or at least one known angle.
- Camera model: Square pixels or known aspect/skew; manageable lens distortion (or prior rectification); stable intrinsics during a session.
- Motion regime (for odometry): Planar motion with fixed horizon; limited roll/pitch when using planar assumptions.
- Robust detection: Reliable line/vanishing-point detection (e.g., LSD + RANSAC), outlier handling, and uncertainty estimation.
- Usability: For educational/museum/forensics applications, clear overlays and explainability are key; for embedded/mobile, latency and power constraints apply.
These applications translate the paper’s core insight—making camera calibration and angle measurement visible and geometric via the calibrating conic and conformal point—into deployable tools, while also suggesting research directions that combine intuitive geometry with learning-based vision.
Collections
Sign up for free to add this paper to one or more collections.