- The paper introduces the S3LI Vulcano dataset, addressing SLAM and place recognition challenges with multi-modal sensor data in volcanic terrains.
- It details a synchronized sensory suite comprising RGB stereo cameras, solid-state LiDAR, and inertial sensors to enhance mapping and pose estimation accuracy.
- Evaluations reveal improved resilience against aliasing and drift, setting benchmarks for future planetary exploration and autonomous navigation research.
The S3LI Vulcano Dataset: A Dataset for Multi-Modal SLAM in Unstructured Planetary Environments
Introduction
The S3LI Vulcano dataset provides a comprehensive benchmarking tool specifically designed for the advancement of SLAM and place recognition algorithms in highly unstructured planetary environments. Unlike many existing datasets focused on urban or indoor environments, this dataset highlights the unique challenges posed by natural terrains like volcanoes, which share characteristics with potential extraterrestrial landscapes. The dataset comprises several sequences recorded on the volcanic island of Vulcano in Sicily, capturing diverse geological formations alongside complex terrains. These sequences are integrated into a multi-modal framework composed of RGB, LiDAR, and inertial data, presenting opportunities to refine algorithms capable of reliable mapping and localization in analogous planetary conditions (Figure 1).
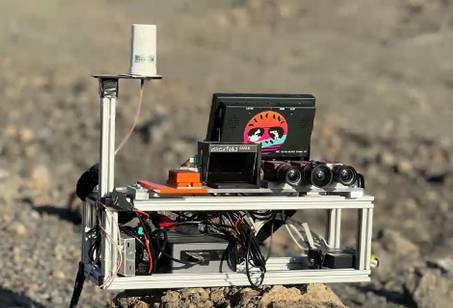
Figure 1: Impression of the S3LI (RGB Stereo, Solid-State LiDAR, Inertial) sensor setup, captured on the Gran Cratere della Fossa, the active center of Vulcano.
Dataset Composition and Sensor Setup
The S3LI Vulcano dataset is recorded using a handheld apparatus that mimics a mobile robot explorer's height and point of view. This sensory suite, named S3LI, incorporates stereo RGB cameras, compact LiDAR technology, an industrial-grade IMU, and a GNSS antenna. The RGB cameras offer detailed visual captures at 10 Hz over synchronized stereo configurations, while LiDAR scans provide depth insights at nearly 4.7 Hz with a solid-state, oscillating mirror arrangement instead of traditional spinning mirror LiDARs. Complementing these visual and LiDAR modalities, the IMU and GNSS components furnish inertial and positioning data essential for SLAM applications (Figure 2).
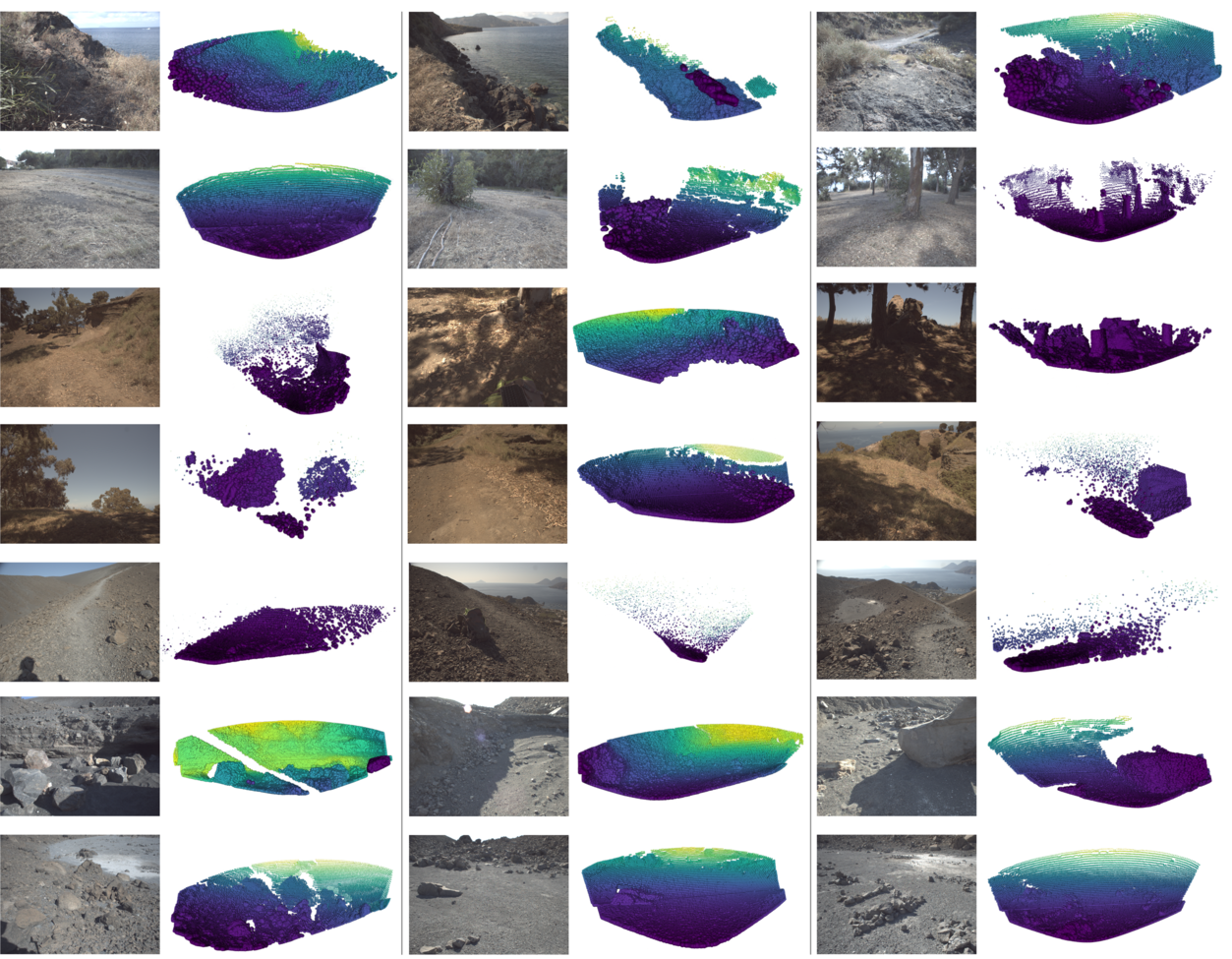
Figure 2: Graphical examples of associated RGB images and LiDAR scans from the dataset sequences.
Integration and Applications
The dataset aims to bridge the gap between algorithm development and real-world operational challenges by offering sequences with complex volcanic features such as old lava tunnels and basaltic structures. These environments pose substantial perceptual challenges due to aliasing and ambiguous features. As such, they serve as ideal testbeds for visual and multi-modal SLAM systems, particularly for future scientific missions. Acknowledging the common SLAM components like localization, mapping, and loop closure involved in these high-stakes environments, the dataset promotes the development of robust algorithms that are essential for autonomous operations in dynamically evolving and visually complex environments.
The evaluation chapter provides an insight into the performance of established SLAM algorithms like R-VIO2 and VINS-Fusion under the unique conditions represented within the dataset. In particular, VINS-Fusion employs loop closure techniques to correct accumulated drift, whereas R-VIO2 demonstrates robustness in pose estimation tasks. The results highlight the effectiveness of these algorithms in handling the extreme aliasing and ambiguity in natural terrains, yet emphasize their limitations in establishing consistent relocalization and mapping benchmarks, typical of planetary explorations (Table 1).
(Table 1)
Figure 3: Example View from the place recognition toolkit, demonstrating overlap matrix, position, FoV, and imagery integration.
Implications and Future Directions
The S3LI Vulcano dataset contributes profoundly to the maturation of SLAM technologies, directing focus towards planetary and other unstructured environments. With its comprehensive sensory inputs, the dataset stimulates the refinement of SLAM algorithms designed to overcome intricate aliasing and recognition challenges. This data enables researchers to stress-test their algorithms in diverse, multi-modal conditions. Future directions envisage enhanced perception systems using advanced sensors tailored for extraterrestrial terrains, potentially facilitating more autonomous and adaptable robotic explorers.
Conclusion
The release of the S3LI Vulcano dataset marks a significant advancement in multi-sensory SLAM datasets, fostering robust algorithm development ready for planetary exploration. It establishes a benchmark for SLAM performances in untamed environments while providing a toolkit to engage researchers with open-source evaluation and place recognition enhancement methodologies. Through continued research and development driven by such datasets, we anticipate progress in autonomous exploration technology suitable for planetary conditions.