Graphs are maximally expressive for higher-order interactions
Abstract: We demonstrate that graph-based models are fully capable of representing higher-order interactions, and have a long history of being used for precisely this purpose. This stands in contrast to a common claim in the recent literature on "higher-order networks" that graph-based representations are fundamentally limited to "pairwise" interactions, requiring hypergraph formulations to capture richer dependencies. We clarify this issue by emphasizing two frequently overlooked facts. First, graph-based models are not restricted to pairwise interactions, as they naturally accommodate interactions that depend simultaneously on multiple adjacent nodes. Second, hypergraph formulations are strict special cases of more general graph-based representations, as they impose additional constraints on the allowable interactions between adjacent elements rather than expanding the space of possibilities. We show that key phenomenology commonly attributed to hypergraphs -- such as abrupt transitions -- can, in general, be recovered exactly using graph models, even locally tree-like ones, and thus do not constitute a class of phenomena that is inherently contingent on hypergraphs models. Finally, we argue that the broad relevance of hypergraphs for applications that is sometimes claimed in the literature is not supported by evidence. Instead it is likely grounded in misconceptions that network models cannot accommodate multibody interactions or that certain phenomena can only be captured with hypergraphs. We argue that clearly distinguishing between multivariate interactions, parametrized by graphs, and the functions that define them enables a more unified and flexible foundation for modeling interacting systems.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper asks a simple question: Do we really need “hypergraphs” (which connect whole groups of nodes at once) to model situations where many things interact together, or can ordinary “graphs” (which connect nodes in pairs) do the job? The authors argue that graphs are already powerful enough to represent higher‑order (group) interactions. In fact, they say graphs are more general and flexible than hypergraphs, and many surprising effects people attribute to hypergraphs can be captured with graph models too.
Key Objectives and Questions
The paper aims to clear up common misconceptions by answering questions like:
- Are graphs limited to pairwise interactions only?
- Do hypergraphs truly add expressive power beyond graphs?
- Can the dramatic behaviors reported in “higher‑order” models (like sudden transitions in epidemics or synchronization) be reproduced with graph models?
- How should we think about “structure” (who can interact) versus “rules” (how they interact)?
- Is there real-world evidence that hypergraphs are needed as the default modeling tool?
Methods and Approach (in Everyday Terms)
Think of a network as a map of who can influence whom:
- A graph has nodes (like people) and edges (links between pairs of people). Importantly, a graph tells you who is connected, but it doesn’t force you to use simple pair rules. You can write complex interaction rules that depend on all of a node’s neighbors at once.
- A hypergraph connects whole groups directly (like linking three or more people in one “hyperedge”).
The authors use:
- Clear examples and analogies:
- Bridges in a city: You can describe multi‑terminal bridges using either group nodes (hypergraphs) or colored pair links (graphs), showing both can encode the same constraint.
- Passing a dollar bill: Even if three people meet at once, you can model it with pair links and adjusted rates (you don’t need a hyperedge).
- Mathematical mapping:
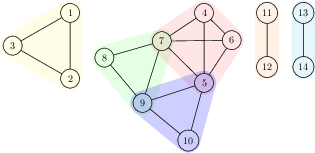
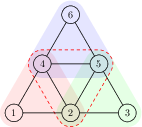
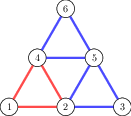
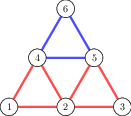
- Any hypergraph can be turned into a multilayer graph (imagine color‑coded layers), where each layer marks which links belong together. This preserves all the group structure without needing hyperedges.
- Function vs structure:
- The network (graph or hypergraph) is the “who can interact” part.
- The node functions (rules) are the “how they interact” part.
- The authors show that complex, multi‑neighbor rules fit naturally on graphs.
- Phenomenology checks:
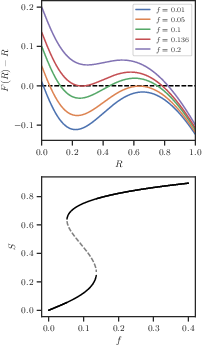
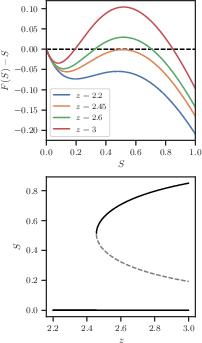
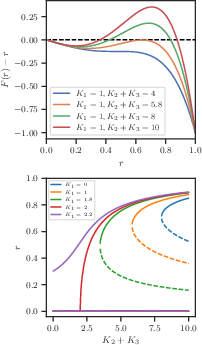
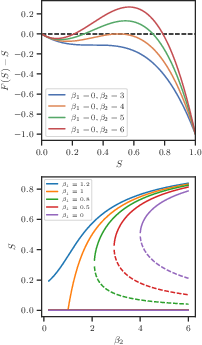
- They show reported effects like abrupt transitions (in contagion, synchronization, etc.) also appear in graph models, even in very simple, tree‑like graphs.
Main Findings and Why They Matter
Here are the main takeaways:
- Graphs are not “pairwise only.”
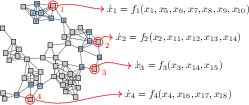
- A graph limits which nodes can influence a given node (its neighbors), but the rule for how that node updates can depend on all its neighbors together (a multivariate rule). So graphs naturally support higher‑order interactions through the functions defined on neighborhoods.
- Hypergraphs don’t add expressiveness; they add constraints.
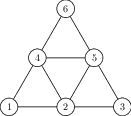
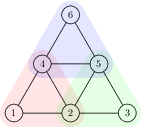
- Hypergraphs require that specific groups act as single units in a consistent way (a hyperedge). That’s stricter than a graph where neighbor groups can overlap in more flexible ways. In other words, hypergraphs are a special, more restrictive case of graph-based models.
- Multilayer graphs can represent any hypergraph exactly.
- If you color or layer edges to mark which ones belong to the same group, you can recover all hypergraph information with a multilayer graph. That makes multilayer graphs strictly more general than hypergraphs.
- “Unique hypergraph phenomena” aren’t unique.
- Reported effects like sudden (abrupt) transitions in synchronization, population dynamics, and epidemics can appear in graph models too. So these behaviors are not proof that hypergraphs are necessary.
- Real-world data rarely includes true group interaction rules.
- Most datasets tell us “who is connected” (neighborhoods), not the precise group rules of interaction. Those rules usually have to be inferred. As group size grows, the internal structure often becomes sparse and is naturally captured by graphs.
Why this matters: If you assume graphs can only do pairwise, you might reach for hypergraphs by default and make models more complex than needed. The paper suggests a simpler, more unified approach: use graphs (or multilayer graphs) and define the interaction rules carefully.
Implications and Potential Impact
- Modeling choices become clearer:
- Separate structure (who can interact: the graph) from the interaction rules (how they interact: the functions). This makes models simpler, more transparent, and easier to compare.
- Avoid unnecessary complexity:
- Don’t use hypergraphs just because interactions involve groups. Graphs with well-chosen functions (or multilayer graphs) can capture the same effects and more.
- Better foundations for inference and prediction:
- Since real data usually gives neighborhoods (not full group rules), starting with graph-based models aligns better with what we actually observe and need to infer.
- Unified toolkit:
- Multilayer networks provide a general way to represent any hypergraph structure, while still allowing additional flexibility (weights, edge variations, layers).
In short, the paper encourages researchers to rethink the default use of hypergraphs and to recognize that graphs—especially with multilayer structure and thoughtful interaction rules—are maximally expressive for modeling higher-order interactions.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of unresolved issues that future research could address to substantiate, refine, or challenge the paper’s claims.
- Formal definition and proof of “maximal expressiveness”: The paper argues graphs are maximally expressive for higher-order interactions but does not provide a rigorous formalization (e.g., a clear function-class inclusion and a general theorem) proving that any hypergraph-based interaction model is a strict special case of graph-based models across common dynamical and probabilistic settings.
- Conditions for exact dynamic equivalence: Beyond illustrative examples, a general proof is missing that dynamic behaviors claimed for hypergraph models (e.g., abrupt transitions, phase behavior) can always be reproduced by graph-based models under clearly stated assumptions (e.g., local tree-likeness, finite-size effects, clustering, heterogeneity).
- Mapping higher-order Laplacians and Hodge-theoretic dynamics: The paper does not establish a rigorous equivalence between dynamics defined via simplicial Laplacians/higher-order Hodge theory and their graph or multilayer representations, including preservation of topological invariants and spectral properties.
- Algorithmic construction of multilayer decompositions: There is no constructive, efficient algorithm for converting a given hypergraph into a multilayer graph (as per the layer-based bijection) with provable guarantees, nor complexity results for finding the minimal number of layers or optimal decompositions under practical constraints.
- Criteria to choose among non-unique multilayer mappings: Many multilayer decompositions may represent the same hypergraph; the paper lacks principled criteria (e.g., parsimony, interpretability, physical plausibility, inference robustness) for selecting an appropriate decomposition in practice.
- Empirical validation across domains: The claim of limited empirical utility of hypergraphs is not supported by systematic evidence; comparative studies are needed on real datasets (e.g., social group interactions, biochemical reaction networks, co-authorship, brain/neuronal assemblies) to quantify predictive performance, parsimony, and interpretability of graph vs hypergraph vs multilayer models.
- Inference of multivariate node functions from data: The paper asserts interaction rules are latent but does not provide methodologies or guarantees (identifiability, sample complexity, robustness to noise) for learning the multivariate functions on neighborhoods from observational or intervention data.
- Model selection and regularization for high-degree neighborhoods: Practical guidance is missing on controlling the combinatorial growth of function complexity with node degree (e.g., structured sparsity, factorization, canonical parametrizations) to avoid overfitting and ensure tractable inference.
- Quantifying “restrictiveness” and “generality”: No metrics are provided to quantify how restrictive hypergraph constraints are relative to graph functions or to assess representational efficiency (e.g., number of parameters, layers, complexity of coupling functions) across alternative formalisms.
- Directionality and ordering within group interactions: The paper notes challenges with directed/ordered hyperedges but does not offer a general, unified and computationally viable graph/multilayer treatment for interactions that depend on the order of participants (e.g., sequence-dependent reactions, ordered coordination).
- Temporal and memory-dependent higher-order processes: The equivalence claims focus on static parametric structure and time-invariant functions; it remains open whether graph-based models can always represent temporal hypergraphs or non-Markovian, memory-dependent multibody interactions without loss of fidelity.
- Mean-field analyses and finite-size effects: The critique that mean-field calculations blur distinctions between hypergraphs and graphs is not accompanied by finite-size, beyond-mean-field analyses that might reveal differences in regimes where clustering, loops, or community structure matter.
- Stability analyses for ecosystems and non-equilibrium systems: The paper states stability is unrelated to hypergraph structure but does not provide general stability theorems or counterexamples across broad parameter spaces, especially for non-linear, heterogeneous, or strongly coupled ecosystems.
- Explicit handling of global constraints: Examples (e.g., “use each color only once”) show global constraints can be encoded, but the paper lacks a general framework for representing and solving models with global or cross-group exclusivity/compatibility constraints within graphs/multilayers.
- Trade-offs between interpretability and flexibility: Hyperedges often serve as interpretable group units; the paper does not quantify or test interpretability trade-offs when replacing hyperedges with graph-based multivariate functions or multilayer decompositions.
- Practical guidance on when hypergraphs are preferable: While the paper argues hypergraphs require explicit justification, concrete decision criteria or diagnostic tests (e.g., structure discovery tests, compression gains, error bounds) that indicate when hypergraph parametrizations are beneficial are not provided.
- Robustness to measurement noise and projection errors: The stability of inferred functions and multilayer decompositions under noisy or incomplete observations is not analyzed; guidance is needed for uncertainty quantification and Bayesian treatment of functions and layer assignments.
- Computational tractability and scalability: The paper does not evaluate computational costs of learning/using multivariate node functions or multilayer decompositions at scale versus hypergraph algorithms (e.g., message passing on factor graphs), including memory and runtime trade-offs.
- Compatibility with established algorithms: How standard hypergraph-specific tools (e.g., simplicial spectral methods, higher-order centralities) map to multilayer or graph-based counterparts with equivalent guarantees is left unclear; explicit algorithmic correspondences are needed.
- Benchmarks for abrupt transitions and critical phenomena: The claim that explosive or abrupt transitions are replicable in graph-based models needs standardized benchmarks, clear parameter mappings, and reproducible protocols across multiple domains (synchronization, contagion, spin systems).
- Formal taxonomy of interaction classes: The paper critiques the conflation of structure and function but does not propose a formal taxonomy that distinguishes neighborhood-based functional classes, group constraints, and global rules, along with their inclusion relations and typical use-cases.
- Extension to probabilistic and equilibrium models: Although the appendix mentions Hamiltonians, a comprehensive, general proof that equilibrium models (including constraint satisfaction, spin glasses, and higher-order interactions) are fully captured by graph/multilayer parametrizations is not provided.
- Data requirements and experimental design: It remains open what data modalities (e.g., high-resolution time series, intervention data) are sufficient for reliably identifying multivariate interactions on graphs and for ruling out the necessity of hypergraphs in applied settings.
- Impact on downstream control and policy: The paper does not explore whether modeling choices (graph vs hypergraph vs multilayer) materially affect optimal control, intervention strategies, or policy outcomes in applications (e.g., epidemic control, ecosystem management), and how to test such impacts.
Glossary
- Adjacency tensor: A higher-order generalization of an adjacency matrix that encodes which sets of nodes form hyperedges in a hypergraph. "a hypergraph is represented by an adjacency tensor,"
- Asymptotically locally tree-like: A property of large sparse graphs where neighborhoods become tree-like, enabling certain analytical treatments. "graph-based formulations that are asymptotically locally tree-like."
- Bipartite factor graph: A bipartite representation with variable and factor nodes used to express constraints or interactions; widely used in statistical physics and inference. "employing hypergraphs as bipartite factor graphs"
- Bipartite network: A graph whose nodes split into two disjoint sets, with edges only between sets (not within), often used to model group–member relations. "converting the system into a bipartite network in which each bridge node must be visited exactly once."
- Bootstrap (k-core) contagion: A contagion process where a node activates only if at least k neighbors are active, leading to coordination effects. "bootstrap (-core) contagion"
- Cliques: Fully connected subsets of nodes in a graph. "the projected graph will also contain clique "
- Constraint satisfaction: A class of problems where variables must be assigned values that satisfy a set of constraints. "a framework central to the theory of constraint satisfaction"
- Factor nodes: Nodes in a factor graph that represent multi-variable functions or constraints attached to subsets of variables. "hyperedges are mapped to factor nodes incident on variable nodes."
- Hamiltonians: Energy functions defining equilibrium systems in physics that determine system behavior and probabilities. "applicable to equilibrium models described by Hamiltonians."
- Heaviside step function: A discontinuous function H(y) equal to 1 for nonnegative input and 0 otherwise, often used for thresholding. "H(y) = {1 if y ≥ 0, else 0} is the Heaviside step function."
- Hill functions: Sigmoidal response functions commonly used to model cooperative biochemical regulation. "such as those based on Hill functions"
- Hyperedge: A generalized edge that connects an arbitrary-sized set of nodes, representing a group interaction. "a hyperedge implies that a certain interaction plays out between a fixed set of nodes"
- Hypergraph: A generalization of a graph where edges (hyperedges) can connect more than two nodes. "hypergraph parametrizations of interactions involving more than two elements"
- Markov chains: Stochastic processes where the next state depends only on the current state (memoryless property). "via Markov chains,"
- Multilayer graphs: Graph representations with multiple layers of edges, enabling richer structure than single-layer graphs. "multilayer graphs provide a natural and strictly more general parametric framework"
- Multilayer networks: Network models with multiple layers capturing different types or contexts of interactions. "can be equivalently formulated using multilayer networks"
- Nested canalizing functions: Boolean-like functions where inputs have a hierarchical ordering that canalizes the output when specific input values occur. "an arguably more realistic variation are nested canalizing functions"
- One-mode projections: The projection of a bipartite graph onto a single node set by connecting nodes that share neighbors, often inducing cliques. "one-mode projections of bipartite graphs"
- Period doubling: A route to chaos characterized by successive bifurcations that double the period of oscillations. "including period doubling and route to chaos"
- Random Boolean networks: Networks of binary nodes updated by node-specific Boolean functions, used to model complex regulatory dynamics. "random Boolean networks introduced by Kauffman in 1969"
- Route to chaos: A qualitative pathway by which deterministic systems transition from regular to chaotic dynamics. "including period doubling and route to chaos"
- Susceptible-infected (SI) dynamics: A contagion model where nodes switch irreversibly from susceptible to infected upon contact with infected neighbors. "susceptible-infected (SI) dynamics"
- Threshold function: A function that switches output when a weighted sum of inputs crosses a threshold; widely used for activation dynamics. "the threshold function is so expressive"
- Triadic percolation: Percolation dynamics driven by triad-level dependencies, capable of complex behaviors. "triadic percolation"
Practical Applications
Immediate Applications
Below are actionable use cases that can be deployed now by re-parameterizing “higher-order” interactions using graphs (including multilayer, directed, weighted graphs) with multivariate node functions.
- Software and data engineering (software)
- Replace hypergraph data structures with multilayer graphs and neighborhood-based multivariate functions in existing graph tooling (e.g., NetworkX/igraph, Neo4j, TigerGraph, GraphX/Spark).
- Workflow: implement a “hyperedge-to-layer” converter that annotates edges by layer/color to preserve group interactions; define node update functions that operate on sets of neighbors.
- Assumptions/dependencies: availability of adjacency data; ability to annotate edges by interaction type; functions may need to be inferred if not explicitly recorded.
- Machine learning and AI (software)
- Implement higher-order effects in standard GNNs via attention, set/threshold aggregators, and edge-type layers instead of bespoke hypergraph neural networks.
- Products: GNN aggregator modules for complex contagion (threshold/Hill functions), neighborhood truth-table operators for Boolean logic, and graph transformers with typed edges.
- Assumptions/dependencies: training data supports learning multivariate neighborhood functions; model selection validates that graph-based implementations match hypergraph baselines.
- Recommender systems and marketing (finance/consumer tech)
- Model group influence (e.g., co-purchase, co-attendance) via multilayer graphs where each layer represents a context (event, bundle, cohort), and node functions encode coordination thresholds.
- Tools: campaign design using complex contagion thresholds on graph layers; A/B experiments comparing pairwise vs multivariate neighborhood functions.
- Assumptions/dependencies: reliable context/interaction labels; careful calibration of thresholds to avoid overfitting group effects.
- Epidemiology and public health (healthcare)
- Encode gatherings and co-location risk using graph layers (e.g., household, workplace, events) and multivariate infection functions (complex contagion, bootstrap percolation) in existing contact-tracing infrastructures.
- Products: risk calculators using layered contact graphs; policy dashboards showing effects of event-layer modulation (e.g., rate reductions).
- Assumptions/dependencies: contact data rarely record explicit interaction rules; functions may need statistical inference; validation against historical outbreaks.
- Operations research and transportation (energy/infrastructure)
- Model multi-terminal intersections/bridges as standard graphs with colored/typed edges to enforce “use-once” or capacity constraints, preserving path-feasibility logic without hypergraphs.
- Workflow: convert multiway constraints to edge classes; apply existing routing/flow solvers; enforce per-layer budgets.
- Assumptions/dependencies: constraint encoding must be complete; layer-based budgets maintain equivalence to group constraints.
- Cybersecurity and enterprise risk (software/finance)
- Represent multi-actor exploits or joint dependencies (e.g., shared libraries, cloud services) via multilayer dependency graphs; propagate risk with multivariate functions over neighborhoods.
- Tools: red-team scenario simulators; dependency auditors using factor-graph/bipartite expansions of components and vulnerabilities.
- Assumptions/dependencies: accurate dependency metadata; response functions tuned to joint conditions (e.g., simultaneous exposure).
- Systems biology and genomics (healthcare/academia)
- Use nested canalizing and threshold functions on ordinary gene regulatory graphs to capture multibody regulation without hypergraph overhead.
- Products: pipeline modules for Boolean/ODE gene networks leveraging multivariate neighbor functions; design tools for synthetic circuits.
- Assumptions/dependencies: regulatory edges known; canalizing parameters inferred or curated; cross-validation against experimental data.
- Financial networks and stress testing (finance)
- Model syndicated loans, club deals, or joint exposures as multilayer graphs with per-layer aggregation of obligations; analyze abrupt transitions using graph-based contagion/threshold dynamics.
- Workflow: layer per instrument or contract type; employ k-core/complex contagion on exposure graphs for systemic risk diagnostics.
- Assumptions/dependencies: instrument-level data granularity; appropriate aggregation functions mirror legal obligations.
- Education and scientific communication (education/academia)
- Update curricula, tutorials, and reproducibility checklists to emphasize that graphs with multivariate neighborhood functions are maximally expressive; prefer factor-graph or multilayer conversions over hypergraphs.
- Products: teaching notebooks demonstrating conversion of hyperedges to layered/clique graphs; assignment templates comparing outcomes.
- Assumptions/dependencies: institutional acceptance; alignment with existing course outcomes.
- Research practice and peer review (academia/policy)
- Require explicit justification when choosing hypergraph models; mandate that authors provide the function definitions and a graph/multilayer equivalent for reproducibility.
- Tools: submission checklists; model cards documenting adjacency vs functional assumptions; minimal working examples in graph form.
- Assumptions/dependencies: journal/conference policy changes; availability of code artifacts.
- Model engineering and benchmarking (software/academia)
- Build a small library: “Hyper→Multi” converter (edge-coloring per hyperedge, minimal-layer decomposition), function DSL for node updates, and test suites showing identical phenomenology on locally tree-like graphs.
- Assumptions/dependencies: correct decomposition (no unintended induced cliques per layer); unit tests on known cases (synchronization, bootstrap contagion, explosive transitions).
Long-Term Applications
These opportunities require further research, scaling, or standardization to mature into robust practice.
- Automated inference of multivariate neighborhood functions (software/academia)
- Develop AutoML/causal discovery tools that infer the functional form of node updates from time series or event logs on graphs, distinguishing true coordination from additive effects.
- Dependencies: high-quality longitudinal data; identifiability under confounding; scalable estimators beyond mean-field approximations.
- Standardized modeling language for graph-based higher-order interactions (software/academia)
- Create a DSL or schema for declaring adjacency, layers, and per-node multivariate functions (including Boolean, threshold, Hill, attention-based aggregators), interoperable across toolchains.
- Dependencies: community buy-in; alignment with existing standards (SBML for biology, ONNX for ML, RDF for knowledge graphs).
- Edge-layer optimization and minimal decomposition (software/academia)
- Research algorithms that find near-minimal layer colorings that preserve hyperedge semantics (avoid induced cliques) while controlling computational cost; formal guarantees on equivalence.
- Dependencies: complexity results; heuristic vs exact methods; benchmarks across domains.
- Unified platforms for multilayer network simulation (software/academia)
- Build scalable simulators (GPU/cluster) for multilayer graphs with heterogeneous node functions, enabling domain users to prototype dynamics without hypergraph engines.
- Dependencies: efficient kernels for set-based aggregations; integration with graph databases/streaming data; observability tooling.
- Domain standards and policy guidance (policy/academia)
- Issue guidelines urging parsimonious graph-based models unless interaction functions or legal/physical constraints prove hypergraph necessity; include cost-benefit assessments.
- Dependencies: collaboration with standards bodies and agencies; position papers; evidence syntheses.
- Verification of phenomenology across sectors (academia/industry)
- Systematically test whether abrupt transitions and other dynamics attributed to hypergraphs are reproducible on locally tree-like or multilayer graphs in real datasets (healthcare, finance, energy).
- Dependencies: curated datasets; shared experimental protocols; cross-institution consortia.
- Hybrid graph–factor graph compilers (software)
- For models that benefit from explicit group nodes (constraints, error-correcting codes), create compilers that toggle between bipartite factor graphs and multilayer graphs for analysis/simulation efficiency.
- Dependencies: correctness proofs; performance profiling; user-friendly APIs.
- Robust decision-support in public health and energy (healthcare/energy/policy)
- Incorporate multilayer graph modeling into operational decision tools (e.g., event restrictions, demand-response coordination) with interpretable multivariate functions and scenario planning.
- Dependencies: stakeholder training; data pipelines; governance for model updates.
- Swarm robotics and multi-agent systems (robotics)
- Design controllers where agents react to multivariate neighborhood states (coordination thresholds, inhibitory/promoter roles), verified in graph-based simulations before hardware deployment.
- Dependencies: safety certification; sim-to-real transfer; communication constraints.
- Knowledge graphs and semantic tooling (software/education)
- Reify group interactions as nodes or layers in knowledge graphs with standardized reasoning over multivariate functions; extend query languages to support neighborhood function predicates.
- Dependencies: ontology extensions; query engine upgrades; developer education.
- Auditing and transparency frameworks (policy/industry)
- Require model cards to distinguish adjacency structure from interaction functions; mandate graph-equivalent forms for models claiming “higher-order” behavior to improve auditability and governance.
- Dependencies: regulatory uptake; auditing capacity; legal frameworks for model disclosures.
Notes on feasibility across applications:
- The central dependency is access to, or inference of, the multivariate interaction functions; adjacency alone is rarely sufficient.
- Layer decomposition must avoid unintended induced cliques for equivalence to hyperedge semantics; tooling should surface assumptions.
- Reported “higher-order” phenomenology often arises from function choice, not parametric structure; validation must compare like-for-like functions on graph vs hypergraph encodings.
Collections
Sign up for free to add this paper to one or more collections.