Discrete turn strategies emerge in information-limited navigation
Abstract: Navigation up a sensory gradient is one of the simplest behaviours, and the simplest strategy is run and tumble. But some organisms use other strategies, such as reversing direction or turning by some angle. Here we ask what drives the choice of strategy, which we frame as maximising up-gradient speed using a given amount of sensory information per unit time. We find that, without directional information on which way to turn, behavioural strategies which make sudden turns perform better than gradual steering. We see various transitions where a different strategy becomes optimal, such as a switch from reversing direction to fully re-orienting tumbles as more information becomes available. And, among more complex re-orientation strategies, we show that discrete turn angles are best, and see transitions in how many such angles the optimal strategy employs.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper asks a simple question with a clever twist: how should a tiny swimmer (like a bacterium) turn and steer to climb “uphill” toward something it wants (for example, higher nutrient concentration) when its senses are limited? The authors show that when the swimmer doesn’t know which way “left” or “right” is better, making sudden, discrete turns (like flipping direction or jumping by set angles) works better than slowly steering. As the amount of usable sensory information changes, the best turning strategy changes too—and surprisingly, the very best strategies use a small, discrete set of turn angles.
Key Objectives
The paper explores four easy-to-understand questions:
- If you can’t tell which side is better, is smooth steering or sudden turning more effective?
- How fast can you climb “uphill” given only a limited amount of sensory information?
- Do the best strategies change when the environment becomes easier or harder to sense?
- If you’re allowed to turn by any angle, do the best strategies use all angles or only specific, discrete ones?
Methods (What They Did, in Everyday Terms)
Imagine a tiny swimmer moving at a constant speed. Its heading (the direction it’s pointing) jiggles randomly over time because of natural wobbling (think of a swimmer buffeted by tiny currents). The swimmer can take actions to change its heading:
- Continuous steering: gently turning all the time at a rate that depends on its current direction.
- Sudden turns: occasionally making a quick jump to a new direction—like “tumbling,” flipping 180° (reversing), or turning 90° (a “flick”).
The authors built a math model where they:
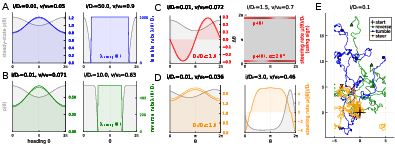
- Measured “climbing speed” as the average of how aligned the swimmer’s heading is with the uphill direction (closer to straight uphill means higher speed).
- Measured “information rate” as how much the swimmer’s control actions depend on its sensed direction, in bits per second (think of it as how many useful “yes/no” pieces of information are used per second).
- Balanced the two with a trade-off: go as fast as possible while spending as little information as possible.
They tested strategies in two and three dimensions and compared cases where the swimmer:
- Has directional information (it knows which way to turn toward uphill), versus
- Has only non-directional information (it senses whether things are getting better or worse but not which side is better).
They then optimized the strategies and plotted the best possible speed for a given information budget, highlighting how strategies “win” or “lose” depending on the situation.
Main Findings and Why They Matter
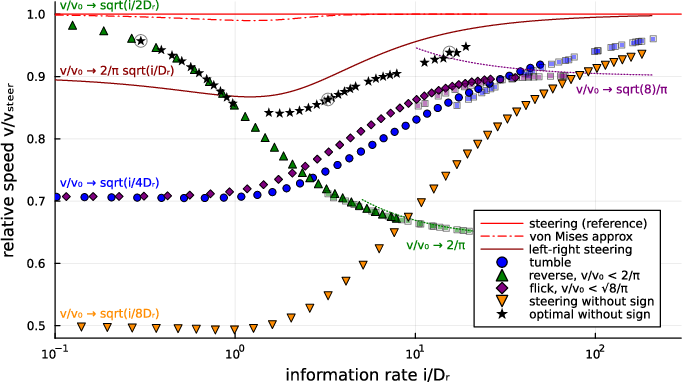
- Sudden turns beat smooth steering when direction is unknown: If the swimmer can’t tell left from right, gently steering tends to waste information or even steer the wrong way. Sudden, discrete turns (like flipping direction or picking from a few set angles) do better.
- Strategy transitions as information changes:
- At very low information: reversing (180° turns) is best—it gets you out of bad directions using very little information.
- At moderate information: adding right-angle turns (90°, called “flicks”) improves performance.
- At higher information: fully re-orienting tumbles to near-uphill directions become best.
- In short, more information unlocks more aggressive and effective turning.
- Discrete angles are optimal: When allowed to use any turn angle, the best strategies don’t spread turns across all angles—they concentrate on a small number of specific angles. As information increases, the set of “best angles” expands step-by-step (for example, from only 180°, to 180° plus 90°, then to more angles).
- Directional sensing dramatically boosts steering: If the swimmer does know which way is uphill (has directional information), continuous steering is excellent—it can smoothly correct its heading and reach near-maximal speed. In three dimensions, this advantage is even bigger.
- Three-dimensional results echo the two-dimensional story: Without knowing the “roll” around its heading (an extra angle in 3D), steering becomes much worse, and discrete turning strategies shine again. As information grows, the best turns still collect around a discrete set of angles (often including 180° and 90°).
Why this matters: Many microbes really do make sudden turns (run-and-tumble, reverse, flick). The paper explains why these “chunky” moves make sense when sensors are noisy or limited and predicts when organisms might switch strategies as their sensing improves or the environment changes.
Implications and Potential Impact
- Understanding real organisms: The results help explain why bacteria and other small swimmers often use sharp, discrete turns instead of gentle steering. They also predict that turn angles might be “preferred” and change as sensing conditions vary—consistent with observations in bacteria, worms, and even flies that show stereotyped turn angles.
- Designing simple, robust robots: For small robots with cheap or weak sensors, adopting discrete turn strategies could be more effective than trying to steer smoothly. As better sensors are added, robots can transition to more refined steering.
- Valuing directional information: Investing in sensors that tell you which way to turn (not just “better/worse”) can hugely improve navigation efficiency, especially in complex environments.
- Future directions: Real organisms use memory and time-dependent strategies (like sensing changes over time or spiraling to learn about their surroundings). Adding memory to models could unlock even smarter navigation rules. The paper also points out other goals beyond average speed (like staying near a food patch or being first to arrive), opening up more ways to study and optimize behavior.
In short: When information is limited, it’s smart to make decisive, discrete turns. As information improves, the best strategies change—and the very best ones still prefer specific, discrete angles rather than trying every possible turn. This simple idea helps explain how tiny creatures navigate and can guide the design of better sensing and control in small devices.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concrete list of unresolved issues that future work could address:
- Partial directional information: The paper treats directional knowledge (e.g., sign of or roll angle) as either fully available or absent. A quantitative “phase diagram” when sensors supply mixtures of directional and non-directional information (e.g., separate rates and ) is not developed, despite being highlighted as unknown.
- Mapping information rate to biophysical parameters: The end-to-end information rate is treated as an exogenous budget. Explicit mappings from gradient steepness, receptor noise, cell size, and signal-processing kinetics to (and to directional vs non-directional components) are not provided, limiting quantitative comparisons to organisms.
- Memory- and history-dependent strategies: The study excludes strategies that exploit temporal derivatives and memory of past measurements (e.g., E. coli chemotaxis). It remains open whether the discreteness of optimal turn angles persists when the controller optimizes over finite-memory policies and whether memory shifts transition thresholds between strategies.
- Measurement delays and finite bandwidth: The analysis assumes instantaneous sensing-action coupling in . Effects of finite temporal filtering, delays, and limited controller bandwidth on optimal policies and speed–information frontiers are not explored.
- Hybrid strategies (steering + discrete turns): Although a general is considered, the paper does not characterize when mixed policies that combine continuous steering (possibly partial sign knowledge) with infrequent discrete reorientations outperform pure strategies across .
- Finite turn duration and actuation costs: Most main-text results assume instantaneous turns (with a brief appendix treatment for in tumbling). A systematic analysis of finite reorientation time , torque limits, metabolic/energetic costs, and their impact on optimal angles and transition points is missing.
- Analytical thresholds for transitions: Crossovers (e.g., reverse → flick → tumble in 2D; reverse → mixed in 3D) are shown numerically, but closed-form expressions or bounds for the critical at which transitions occur are not derived.
- Scaling of the number of discrete angles with : While discreteness is proven (via the contact function) and bifurcations are observed, there is no theory for how the number of support angles grows with , nor bounds analogous to channel-capacity scaling laws.
- Uniqueness and stability of discrete-angle solutions: The paper does not analyze whether the optimal discrete sets are unique, how robust they are to small anisotropies or leakage of directional information, and whether bifurcations exhibit hysteresis under changing .
- Execution noise around target angles: Real turn angles will have variability. How dispersion around discrete targets alters performance and whether angle sets broaden or merge with increasing noise remains unaddressed.
- Three-dimensional steering with partial roll information: 3D results contrast “known roll” vs “unknown roll” (modeled with ). A systematic study across , with analytical low- exponents and transition thresholds where shifts from toward behavior, is lacking.
- Robustness to alternative information metrics: Optimal policies are derived using instantaneous mutual information . The impact of using transfer entropy, multi-step mutual information, or action–perception channel models with feedback and delay is not investigated.
- Environmental heterogeneity: The model assumes a constant, unidirectional gradient and isotropic rotational diffusion. Effects of gradient curvature, spatial/temporal gradient noise, boundary conditions, obstacles, and advecting flows (shear) on the optimal strategy are not studied.
- Additional motion noise and kinematics: Translational diffusion, speed fluctuations, inertial effects, and chiral/helical swimming are omitted. Their influence on the speed–information frontier and on discrete vs smooth control is unknown.
- Controller noise structure: For steering, the optimal emerges, but the generality of this result under alternative noise models, non-Gaussian control noise, or correlated sensing–actuation noise is not assessed.
- Proof that unsigned steering is always inferior without direction cues: The paper presents numerical and asymptotic evidence that, absent directional information, continuous unsigned steering underperforms discrete strategies. A general formal proof across parameter regimes is not given.
- Generalization of discreteness with per-turn penalties: The contact-function argument shows discreteness for instantaneous turns; whether discreteness survives under nonzero turn duration , dead time, or refractory periods is not established.
- Objective functions beyond mean up-gradient speed: First-passage time to a target, target-acquisition probability, loitering/retention near resources, and population-level objectives (e.g., for travelling bands) are identified as important but not analyzed for how they reshape optimal strategies and discreteness.
- Learning and adaptation under fluctuating : Real agents may experience time-varying information rates (e.g., changing gradient steepness). How optimal policies adapt online, whether there is hysteresis in switching, and the role of meta-information costs are open.
- Experimental validation roadmap: Concrete experimental tests—e.g., measuring turn-angle distributions vs. gradient noise to detect predicted reverse → flick → tumble transitions; manipulating roll uncertainty in 3D swimmers; or estimating in vivo to place organisms on the predicted frontier—are suggested but not developed into actionable protocols.
- Biological implementability: How organisms could implement angle-selective turn distributions neurophysiologically or via flagellar control, and what developmental or energetic constraints shape feasible discrete sets, is not addressed.
- Sensory architecture trade-offs: With bilateral sensors, the sum vs. difference channels can yield different and . Design trade-offs and optimal allocation of sensing resources between directional and non-directional channels remain undeveloped.
- Numerical and approximation sensitivity: Some steering results rely on approximating continuous control by small jumps. The dependence of conclusions on limits, discretization choices, and numerical solvers is not quantified.
Practical Applications
Immediate Applications
Below is a set of actionable use cases that can be deployed now, grounded in the paper’s findings on information-limited navigation and the emergence of discrete turn strategies.
- Info-aware fallback controllers for autonomous robots in degraded sensing
- What: When directional sensing is unreliable or absent, switch to discrete reverse/tumble/flick maneuvers to maintain up-gradient progress; trigger the switch when the online mutual information rate from heading to action falls below a threshold.
- Why it works: Without directional information, sudden discrete actions outperform continuous steering; speed degrades predictably with information (e.g., v ∼ sqrt(i) for discrete strategies).
- Tools/products/workflows: Controller libraries (e.g., ROS modules) that estimate I(Θ; dΘc)/dt online; policy schedulers that select among reverse/tumble/flick/steer; gradient-plume tracking planners.
- Assumptions/dependencies: Ability to estimate mutual information rate and rotational diffusion Dr; smooth, stationary gradients; actuators capable of sharp turns; instantaneous or low-time-penalty turns. (Sectors: robotics, public safety, industrial inspection)
- Microfluidic chemotaxis assay optimization
- What: Design assays and analysis pipelines that choose turn policies (reverse at low information, flick at medium, tumble at higher information) to maximize climbing speed given sensor noise and gradient steepness.
- Tools/products/workflows: Fokker–Planck solvers for steady-state p(θ); Poisson jump process simulators; speed–information frontier dashboards for assay tuning.
- Assumptions/dependencies: Approximate 2D/3D planar gradients; known Dr; quantifiable time penalty per turn; stationary environments. (Sectors: healthcare, biotech R&D, academia)
- Swarm plume tracking with discrete-turn protocols
- What: Equip small aerial/underwater robots with simple non-directional sensors to map leaks or pollution; use reverse at low information rates and transition to tumble/flick as signal quality improves.
- Tools/products/workflows: Swarm coordination software with per-agent information estimators; minimal sensing hardware; adaptive discrete-angle schedulers.
- Assumptions/dependencies: Reliable non-directional signals (e.g., concentration change); wind/current disturbances modeled; limited inter-agent comms; energy budget. (Sectors: energy, environmental monitoring, disaster response)
- Synthetic biology: tuning run–reverse–flick behaviours
- What: Engineer microbial strains to adopt discrete navigation modes (run–reverse or run–reverse–flick) matched to expected environmental noise and gradient steepness to improve chemotactic performance in bioprocesses.
- Tools/products/workflows: Flagellar motor control (CW/CCW switching) tuning; gradient microenvironments; behavioural quantification against speed–information frontiers.
- Assumptions/dependencies: Genetic control over motor states; stable gradients; ethical and biosafety constraints; mapping between molecular noise and I(Θ; dΘc)/dt. (Sectors: biotech, industrial fermentation, healthcare)
- Information-aware benchmarking for navigation controllers
- What: Evaluate controllers using the speed–information frontier: measure mutual information rate from sensor-to-action and compare achieved v/v0 to theoretical bounds (e.g., tumble vs reverse vs flick vs steer).
- Tools/products/workflows: Instrumentation to log heading and action; mutual information estimators; frontier visualization; regression tests for controller updates.
- Assumptions/dependencies: Accurate estimation of I(Θ; dΘc)/dt; known Dr; representative gradient scenarios. (Sectors: software, academia, robotics QA)
- Consumer robotics robust mode
- What: Vacuum cleaners and lawn robots adopt discrete angle sets (e.g., ±90°, 180°) when directional sensing is unreliable (dust/smoke, reflective surfaces), improving coverage and avoiding stalls.
- Tools/products/workflows: Firmware update to include discrete fallback modes; bumper/IMU proxies for information rate drop; angle-set schedulers.
- Assumptions/dependencies: Simple proxies for sensing quality; actuation that supports sharp turns; indoor layout variability. (Sectors: consumer electronics)
- Sensor design guidance for low-cost systems
- What: If directional sensing is expensive, pair non-directional sensors (e.g., scalar concentration change) with discrete-turn controllers; conversely, small bilateral or roll sensors unlock signed steering (large performance gains).
- Tools/products/workflows: Sensor selection decision trees; roll-angle IMU modules; minimal bilateral array designs.
- Assumptions/dependencies: Size/weight/cost constraints; power budget; 3D roll-angle sensing feasibility. (Sectors: hardware, robotics, micro-UAVs)
- Operational guidance for field robotics
- What: Codify standard operating procedures that require discrete-turn fallback when directional sensors degrade (e.g., smoke-filled environments).
- Tools/products/workflows: Checklists; training modules; controller certification tests that include information-aware stress scenarios.
- Assumptions/dependencies: Reliable detection of sensing degradation; organizational adoption; legal compliance. (Sectors: policy/public safety, industry standards)
- Immediate experimental tests of discrete angles in organisms
- What: Measure turn angle distributions and their bifurcations with varying gradient strength/noise, testing the paper’s prediction that optimal strategies adopt discrete angles and increase their number with information.
- Tools/products/workflows: High-speed tracking; gradient chambers; analysis based on the contact function Ψ(Δθ).
- Assumptions/dependencies: Stable gradients; adequate sample sizes; mapping behavioural noise to information rates. (Sectors: academia, neuroscience, biophysics)
Long-Term Applications
These use cases require further research, scaling, or development before large-scale deployment.
- In vivo microrobotic drug delivery with information-limited navigation
- What: Microrobots navigate chemical gradients in tissue/blood using discrete-turn strategies when directional cues are weak; switch to signed steering when minimal directional sensors are available.
- Tools/products/workflows: Biocompatible microrobots; chem sensors; contact-function-based angle schedulers; in vivo testing pipelines.
- Assumptions/dependencies: Regulatory approval; complex flows and 3D roll-angle estimation; energy constraints; safety. (Sectors: healthcare, medical devices)
- Adaptive meta-controllers that trigger phase transitions among strategies
- What: Online estimation of I(Θ; dΘc)/dt and Dr to switch between reverse → flick → tumble → signed steering as information and time penalties change; includes 3D roll-angle handling.
- Tools/products/workflows: Real-time mutual-information estimators; low-latency schedulers; hybrid continuous–discrete control stacks.
- Assumptions/dependencies: Estimation accuracy under dynamics; compute budget; formal verification for safety-critical systems. (Sectors: robotics, autonomous vehicles, UAVs)
- Information-aware safety and certification standards
- What: Formalize requirements that autonomous systems demonstrate robust performance under bounded information rates, including discrete-turn fallback and documented speed–information trade-offs.
- Tools/products/workflows: Standard test suites; conformance metrics; third-party audits.
- Assumptions/dependencies: Industry and regulatory consensus; liability frameworks; measurable information-rate proxies. (Sectors: policy, standards, public safety)
- Large-scale environmental remediation via swarms
- What: Swarms of micro-UAVs/micro-AUVs track and neutralize plumes (oil spills, methane leaks) using discrete-turn strategies optimized for low-cost sensors, scaling to thousands of agents.
- Tools/products/workflows: Distributed plume mapping; resource-aware angle schedulers; resilient comms.
- Assumptions/dependencies: Endurance, weather robustness, communication reliability; environmental permits. (Sectors: energy, environment)
- Sensor innovation for signed steering and roll-angle estimation
- What: Develop small, low-power directional and roll-angle sensors that enable high-performance steering in 3D; quantify when minimal directional cues justify sensor cost.
- Tools/products/workflows: Novel materials; MEMS design; co-design of sensing and control.
- Assumptions/dependencies: Manufacturing scalability; cost targets; integration into micro-robots. (Sectors: hardware, sensors)
- Memory-augmented navigation combining discrete turns with temporal sensing
- What: Incorporate derivative sensing (e.g., of attractant concentration) and memory into controllers to surpass current unsigned steering limits; explore spiral trajectories and weathervaning strategies.
- Tools/products/workflows: Algorithms that fuse temporal derivatives with discrete actions; learning-based controllers; experimental validation.
- Assumptions/dependencies: Algorithmic advances; additional sensing channels; stable training environments. (Sectors: software/AI, robotics, biology)
- Engineered ecosystems with discrete saccadic navigation
- What: Design microbial consortia or small organisms whose navigation uses discrete angles tuned to information regimes, improving bioremediation or targeted colonization.
- Tools/products/workflows: Gene circuit design; behaviour shaping; closed-loop microecology control.
- Assumptions/dependencies: Biosafety; ecological impact assessments; long-term stability. (Sectors: biotech, environment)
- Decision systems in finance/operations under rational inattention
- What: Translate discrete action menus to domains where sensing/analysis is costly (e.g., inventory routing, trading), using contact-function-inspired policies for limited information.
- Tools/products/workflows: Information-rate budgeting; discrete policy optimization; performance frontiers.
- Assumptions/dependencies: Valid mapping from navigation to decision dynamics; domain-specific noise models; governance. (Sectors: finance, operations research)
- Education and workforce development
- What: Course modules and lab kits (e.g., lab-on-chip chemotaxis) teaching information-limited control, speed–information frontiers, and discrete-angle emergence; bridges to information theory and control.
- Tools/products/workflows: Open-source simulators; experiment kits; curricula.
- Assumptions/dependencies: Funding; educator training; accessible hardware. (Sectors: education, academia)
Glossary
- Ansatz: A proposed functional form used to approximate or guide the search for a solution. "use ansatz $\lambda_{\mathrm{strong}(\theta)$."
- Bifurcation: A qualitative change where the optimal solution splits to include additional distinct behaviors as a parameter varies. "the solution bifurcates to use two additional angles, ."
- Channel capacity: The maximum achievable mutual information of a communication channel under noise constraints. "Related arguments for discreteness from analyticity have been made in channel capacity problems"
- Contact function: An auxiliary function used in the constrained optimization whose level set identifies the support (active set) of optimal turn angles. "This contact function is analytic, and clearly has ."
- Controller noise: Noise added to the control action that limits information flow and regularizes optimization. "A steering strategy with very little controller noise is allowed"
- End-to-end information rate: The overall rate at which information flows from sensory input (heading) to behavioral output (control), measured in bits per second. "Focusing on the end-to-end information rate gives us a framework in which to study what is in principle possible"
- Fixed point: A heading value where the dynamics of the control cause the system to remain (stable) or be repelled (unstable). "changes sign to create a pair of fixed points at "
- Flick strategy: A navigation strategy that uses right-angle turns to reorient. "In the appendix we consider a flick strategy which uses right-angle turns, ."
- Fokker–Planck equation: A partial differential equation describing the time evolution of the probability density of a stochastic process. "The equivalent Fokker-Planck equation is"
- Frontier (speed–information plane): The Pareto-optimal curve of maximal speed for a given information rate. "gives us a frontier on the speed-information plane."
- Gaussian noise: Noise with a normal (Gaussian) distribution used to model diffusion-like randomness. "and Gaussian noise from diffusion"
- High-information limit: The regime where the available information rate is large, often simplifying optimal strategies or saturating performance. "and high-information limits except reverse"
- Lagrange multipliers: Variables introduced to enforce constraints in an optimization problem. "These are enforced by Lagrange multipliers:"
- Low-information limit: The regime where the available information rate is small, yielding characteristic scaling laws for performance. "All low-information limits are "
- Mutual information rate: The mutual information between state and action per unit time, quantifying how much behavior depends on the sensed state. "The information rate we use is mutual information between the heading and the controlled update , per time ."
- Phase diagram: A depiction of which strategy is optimal in different parameter regimes (e.g., sensing types or noise levels). "The phase diagram of strategies in this instance is unknown."
- Poisson jump process: A stochastic process where events (jumps) occur randomly in time with a Poisson distribution. "Here is a Poisson jump process"
- Poisson process: A process modeling randomly timed events with independent increments and exponentially distributed inter-arrival times. "the intrinsic noise of the Poisson process can play this role."
- Rational inattention: A framework where decision-makers optimally allocate limited information-processing capacity, leading to discrete actions. "This has parallels to the idea of rational inattention"
- Reverse strategy: A discrete turning strategy that reverses heading by radians to improve up-gradient movement with minimal information. "we recover the reverse strategy."
- Roll angle: The rotational degree of freedom around the current heading direction relevant in 3D steering. "the agent suffers diffusion in its roll angle "
- Rotational diffusion: Random rotation of heading over time, modeled as diffusion with coefficient . "This angle suffers rotational diffusion "
- Run and tumble: A navigation strategy that alternates straight runs with sudden random reorientation (tumbles). "Run and tumble is one such strategy"
- Saccade: A discrete, rapid turning movement with stereotyped angles, analogous to visual saccades but in locomotion. "flies adopt discrete turn ``saccades'' with stereotyped angles"
- Steady-state distribution: The time-invariant probability distribution over headings when the system has equilibrated under dynamics and control. "we can solve to obtain the steady-state distribution."
- Trade-off parameter: A scalar weighting that balances speed against information cost in the optimization objective. "We do so by introducing a trade-off parameter "
- Weathervane motion: A gradual steering behavior that leverages memory of recent stimuli to align with a gradient. "performs a ``weathervane'' motion"
Collections
Sign up for free to add this paper to one or more collections.