- The paper introduces TAG, a low-cost, open-source glove achieving sub-degree, drift-free 21-DoF hand tracking with high EMI resistance.
- TAG integrates 32-actuator fingertip tactile arrays that capture spatial geometry and force cues, improving feedback for dexterous manipulation.
- The system enhances teleoperation tasks and imitation learning by providing reliable, high-resolution tactile data for complex robotic manipulations.
Tactile Feedback Array Glove (TAG) for Dexterous Manipulation and Teleoperation
Introduction and Motivation
Dexterous robot manipulation is increasingly driven by policies learned from real-world demonstrations, where the quality of human data is critical. However, existing teleoperation paradigms face core limitations: vision- and VR-based systems suffer from errors, occlusion, and lack of haptic information, while glove-based solutions are either susceptible to mechanical fatigue, drift, electromagnetic interference (EMI), or are prohibitively expensive. Critically, the human operator is deprived of tactile information, which is essential for fine-grained manipulation, leading to an overwhelming dependence on vision and a degraded capacity to perform and collect reliable demonstrations for learning-based manipulation.
To address these challenges, this work introduces TAG—the Tactile Feedback Array Glove—a fully open-source, low-cost glove system integrating drift-free, EMI-resilient 21-DoF hand tracking with high-resolution, multi-point tactile feedback via miniaturized electroosmotic pumps (EEOPs). TAG enables spatial encoding of contact geometry and force cues, closing the perceptual loop for real-world teleoperation and promoting high-fidelity demonstration dataset collection.
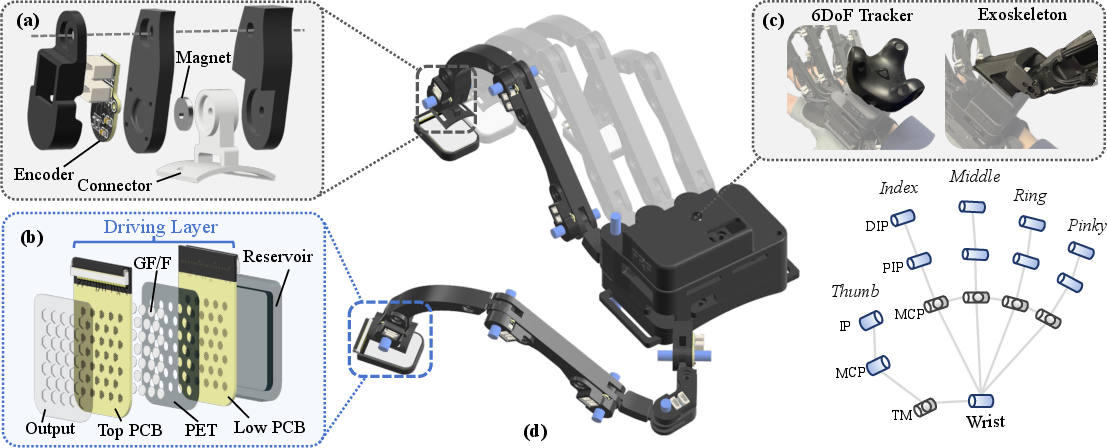
Figure 1: Hardware architecture of TAG: (a) joint encoder with magnetometer and ring magnet; (b) multilayer EOP tactile feedback module; (c) compatibility with tracking modules; (d) 21-encoder hand kinematic distribution for full hand motion capture.
System Architecture
High-Precision Hand Tracking
TAG employs 21 triaxial MLX90393 magnetometers, each paired with a diametrically magnetized NdFeB ring. This configuration yields robust, drift-free angular estimation (error < 0.8∘) and strong resilience to EMI. Calibration involves rotating each joint through its range to extract environmental bias, nulling common-mode errors and ensuring sustained sub-degree precision even in proximity to high-interference electronic equipment.
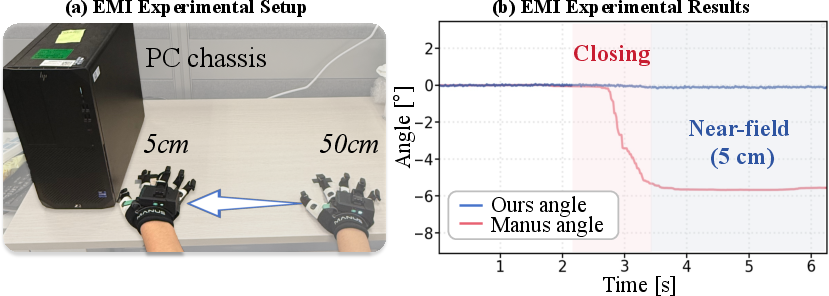
Figure 2: EMI resilience testing reveals TAG's negligible angular deviation (0.24∘) under EMI, outperforming the commercial Manus glove (5.69∘ deviation).
An anatomically inspired, 21-DoF distribution closely replicates human kinematics, including decoupled flexion/extension and adduction/abduction on MCP joints and a full 5-DoF configuration for the thumb (IP, MCP, three-axis TM). This fidelity supports cross-platform retargeting to a wide variety of robotic hands with minimal information loss.
High-Resolution Tactile Feedback
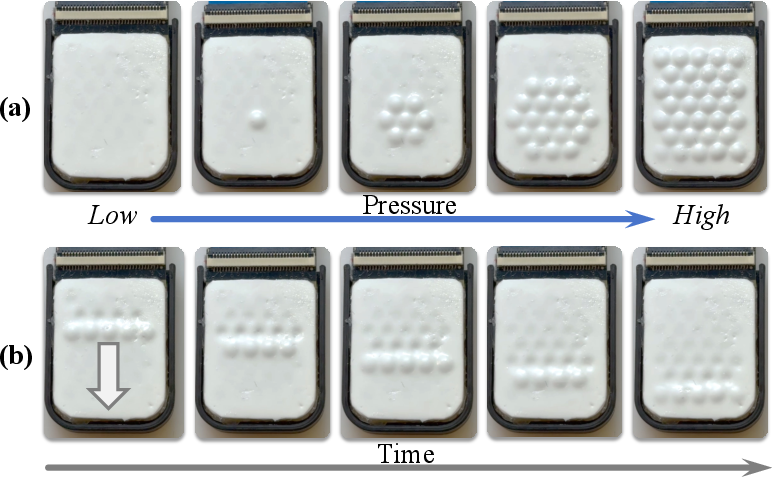
Each fingertip is equipped with a 2cm2 EEOP-based feedback module comprising a 32-actuator array. The electrohydrodynamic architecture uses independent high-voltage actuation per taxel (+200V/0V/-200V per element), featuring optimized via geometry for enhanced hydraulic efficiency, symmetric layouts for robotic mapping fidelity, and relaxed mechanical tolerances for cost-efficient, reproducible handcrafting.
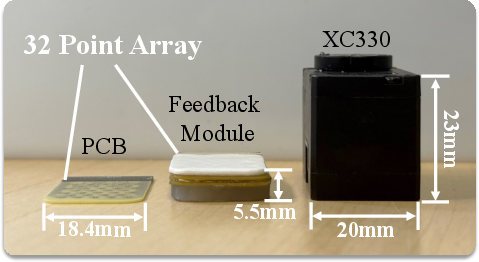
Figure 3: Physical form factor of the fingertip tactile module, compact at 29×18.4×5.5 mm.
Tactile data is encoded by two distinct strategies:
Evaluation
TAG is benchmarked with high-precision angular references (Dynamixel XC330-M288-T). Joint estimation shows maximum errors within 0.35∘ under all trajectories and negligible drift (0.02∘) over prolonged (>1000s) operation. Under EMI, TAG outperforms commercial solutions by over an order of magnitude in angular stability.

Figure 5: Exoskeleton glove tracking: setup, real-time trajectories, 1000s stability, and statistical error distribution (σ = 0.215°).
TAG’s tactile mapping translates the outputs of multiple robot-side end-effectors (LeapTac, Inspire Hand, XHand, GelSight Mini, TacSL) into coherent, discriminable feedback for the operator. Systematic evaluation demonstrates successful normalization of disparate sensor geometries and thresholds, supporting the generality of the tactile feedback protocol.
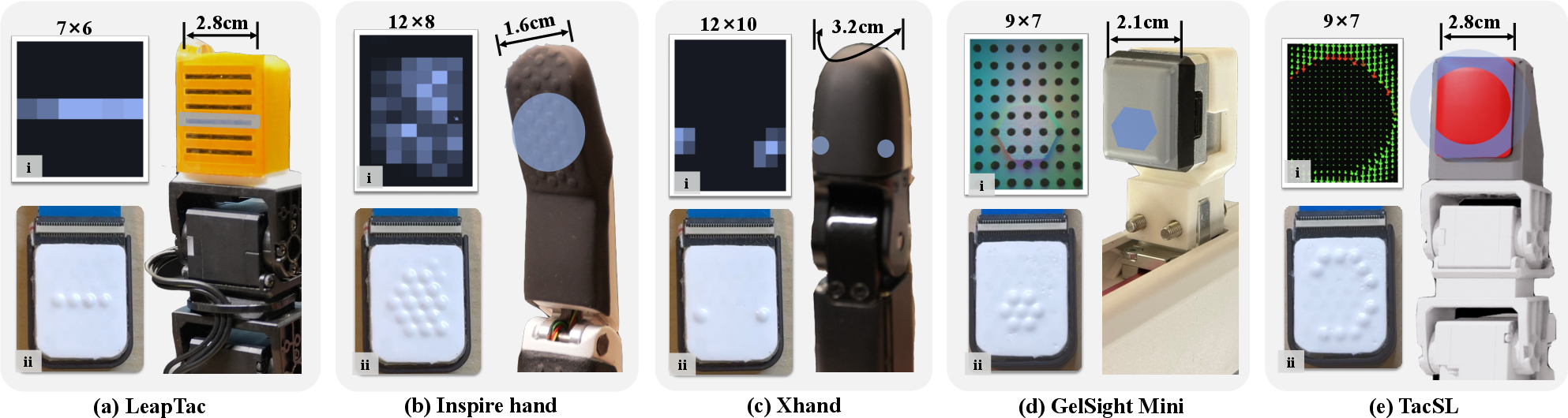
Figure 6: Tactile array rendering of various robotic end-effector sensor profiles onto the glove: line (LeapTac), patch (Inspire), discrete points (XHand), and complex forms (GelSight Mini, TacSL).
User Studies
A user study with trained subjects quantitatively assesses TAG’s capacity for conveying geometric and dynamic tactile cues:
- Shape Discrimination: Four geometric primitives (single-point, two-point, line, plane) are reliably differentiated, with near-perfect classification (100% for single point, 0.8∘0 for all classes).
- Dynamic Force Direction: Rolling force directions (F/B, B/F, L/R, R/L) are classified with high accuracy, with minor confusion attributable to limited lateral resolution.
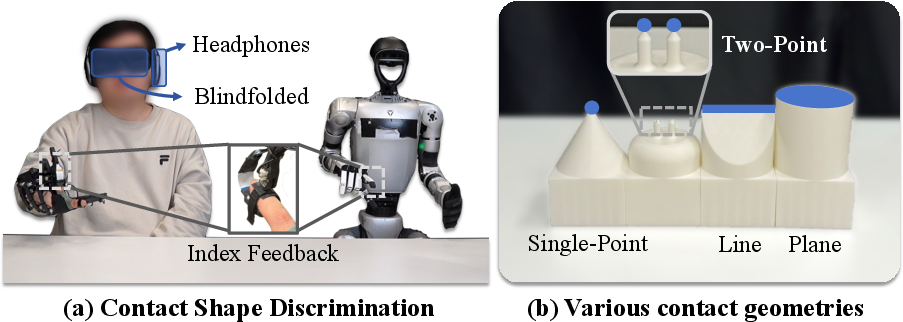
Figure 7: User study setup (blindfolded and sound-isolated operator discriminating contact geometry via TAG) and contact shape objects.
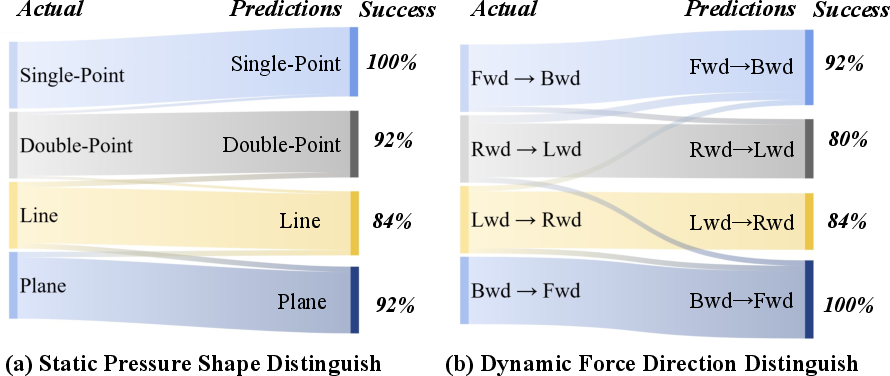
Figure 8: Sankey diagram of user study results for contact shape/direction discrimination; thickness denotes classification trial counts.
Teleoperation Experiments
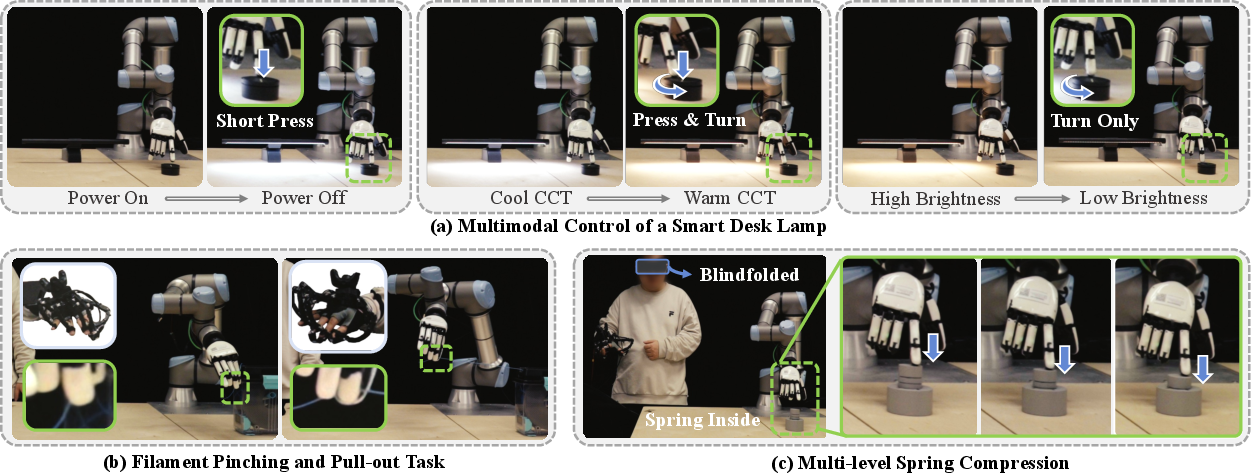
TAG is deployed for real-world dexterous tasks on robotic platforms:
Imitation Learning
Demonstrations collected via TAG are utilized to train robot manipulation policies (via ManiFlow). Learned policies, incorporating tactile as part of robot state, display high task success (up to 15/15 in CCT Adjustment, 13/15 in Full Spring Compression), substantiating the physical consistency and quality of TAG-derived data.
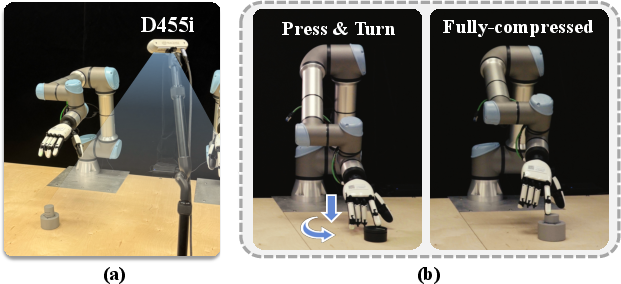
Figure 10: Imitation learning setup and representative manipulation tasks using TAG for demonstration collection.
Retargeting & Integration
TAG’s kinematic and tactile data streams are algorithmically retargeted to arbitrary robotic hands (XHand, LeapHand, InspireHand) via constrained optimization to preserve human-robot correspondences, allowing robust reproduction of operator gestures irrespective of hand morphology.
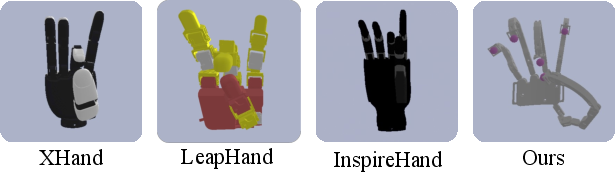
Figure 11: TAG kinematic retargeting performance: qualitative matches of gestures across diverse robotic hand architectures.
Discussion and Implications
TAG advances glove-based teleoperation by merging sub-degree, EMI-immune motion tracking with spatially rich, multi-point tactile feedback, all in an open-access, sub-$500 hardware platform. This closes a critical gap in teleoperation—allowing operators to reliably interpret complex, real-time contact interactions and record physically grounded demonstrations. The validated integration of tactile cues enhances operator situational awareness, improves teleoperation outcomes in contact-rich tasks, and supports the collection of high-fidelity, generalizable demonstration data crucial for end-to-end learning frameworks.
The design provides strong claims regarding system performance: sub-degree drift-free tracking under EMI, high tactile spatial resolution in a miniaturized form factor, and robust perception of both geometry and force in teleoperation contexts. However, TAG does not deliver kinesthetic feedback and has limited capacity for static shear rendering; assembly-based process variability may affect long-term durability.
Looking forward, these results anticipate even broader integration of haptic feedback into general-purpose, scalable robot learning pipelines and teleoperation interfaces. The open-sourcing of all schematics and build guides will likely catalyze widespread adoption and iterative engineering—potentially spawning new hybrid actuation strategies and richer tactile feedback modalities incorporating kinesthetic constraints and static shear rendering.
Conclusion
TAG bridges the tactile perception-action gap in glove-based teleoperation with a fully open-source, cost-efficient, high-precision platform that combines 21-DoF drift-free tracking with 32-actuator fingertip tactile arrays. The system is rigorously validated across kinematic tracking, EMI robustness, tactile discrimination tasks, complex teleoperation use cases, and downstream policy learning from demonstration. By enabling spatially encoded robotic-to-human tactile transfer, TAG stands as a robust enabler for high-fidelity manipulation data collection, robust teleoperation, and the acceleration of dexterous robot manipulation research.
Reference:
"Feel Robot Feels: Tactile Feedback Array Glove for Dexterous Manipulation" (2603.28542)