- The paper introduces an explicit construction of compact, embedded λ-hypersurfaces that are strictly mean convex yet non-convex for λ>0.
- It employs analytical reduction to systems of nonlinear ODEs and a shooting method to classify profile curves ensuring smooth, closed hypersurfaces.
- The results challenge convexity rigidity in geometric flows and offer new insights into weighted isoperimetric problems in Euclidean space.
Compact Embedded Mean Convex λ-Hypersurfaces: Non-Spherical Examples
Introduction and Motivation
The study of compact embedded λ-hypersurfaces represents a significant intersection of geometric analysis and the theory of curvature flows in Euclidean space. These hypersurfaces satisfy the equation H+⟨X,ν⟩=λ, where H is the mean curvature, X the position vector, ν the inward unit normal, and λ a real parameter. Such hypersurfaces arise as critical points for weighted area functionals under weighted volume-preserving variations, directly relating to isoperimetric problems in Gaussian spaces.
For λ=0, the objects in question reduce to self-shrinkers under the mean curvature flow, which have been the subject of notable rigidity and classification results. A classical conjecture posits that the round sphere is the sole compact embedded self-shrinker diffeomorphic to a sphere. This was confirmed in dimension two by Brendle, while the situation for higher dimensions or other signs of λ remains open or exhibits more complex phenomena.
For λ<0, prior work established the existence of compact convex embedded λ0-hypersurfaces, diffeomorphic to spheres but not isometric to the round sphere. For λ1, convexity becomes a rigidity criterion: any compact convex embedded λ2-hypersphere must be the round sphere itself. The open question is thus the existence of compact, mean convex but non-convex embedded λ3-hypersurfaces diffeomorphic to λ4 with λ5.
Main Results and Theoretical Significance
This work provides an explicit construction of compact embedded mean convex non-convex λ6-hypersurfaces diffeomorphic to spheres, for λ7. The principal theorem asserts: for all λ8 and λ9, there exists such a hypersurface in H+⟨X,ν⟩=λ0. Importantly, these examples are not isometric to the standard round sphere.
This classification is sharp: for H+⟨X,ν⟩=λ1, convexity in the context of compact embedded H+⟨X,ν⟩=λ2-hypersurfaces forces spherical geometry due to rigidity results, but mean convexity alone does not.
The authors' approach leverages analytical reduction to systems of nonlinear ODEs for the symmetry-reduced profile curves and employs a shooting (continuity) argument. The solutions combine local analysis of principal curvatures and existences of inflection and critical points, with global classification of concatenated graphical segments designated by types, reflecting curvature signatures.
Analytical Framework and Reduction to ODEs
A H+⟨X,ν⟩=λ3-hypersurface under H+⟨X,ν⟩=λ4 symmetry in H+⟨X,ν⟩=λ5 can be reconstructed from a planar profile curve parametrized by Euclidean arc length. The H+⟨X,ν⟩=λ6-hypersurface equation reduces to the system: H+⟨X,ν⟩=λ7
with constraint H+⟨X,ν⟩=λ8.
This system has singularities at H+⟨X,ν⟩=λ9, treated by dedicated analytic existence and uniqueness arguments. Profile curves passing through special orbits (axes) are associated with initial data problems, and constants and "round" solution families correspond to spheres and generalized cylinders.
Local and Global Classification of Profile Curves
A detailed qualitative analysis classifies local graphical segments of solutions according to the signs and vanishing of derivatives:
- Type 1: A unique critical point H0
- Type 2: A unique inflection point H1
- Type 3: No H2 in the domain
By examining how H3 vanishes, the curve can be successively partitioned into maximal graph intervals, which can be concatenated to produce a global profile curve built from these segments. Each class H4 describes a sequence of H5 graphical pieces of types H6 to H7.
The maximal existence and terminal behavior of each segment are controlled via qualitative ODE comparison arguments and sharp analytic estimates. These guarantee, e.g., that type 1 or type 2 pieces terminate at specific axis crossings or blow-up behaviors.
Existence Proof via Continuity (Shooting Method)
The core construction employs a shooting argument: initial parameter values for the profile curve (e.g., starting radius H8) are continuously varied. Key intermediate types of profile curves—those emanating from the H9-axis (X0) and those from the X1-axis (X2)—are systematically analyzed. Their classes are tracked as functions of initial conditions, and transition thresholds are shown to correspond to the creation of closed embedded curves generating the desired hypersurfaces.
Visual Illustration of Profile Curve Behavior
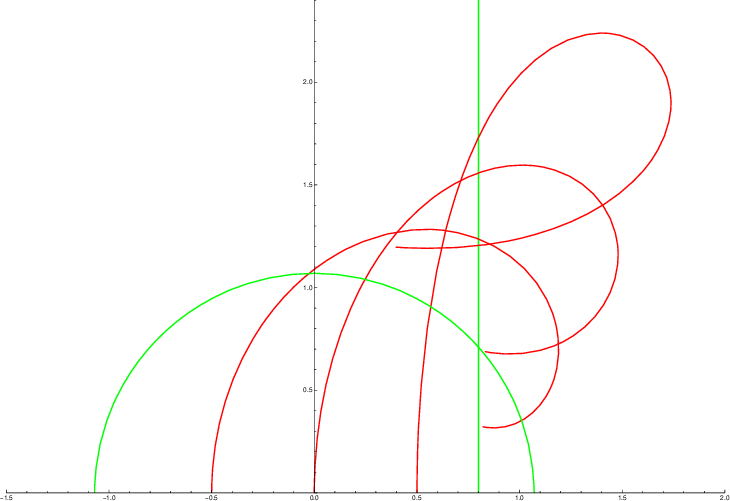
Figure 1: Graphs of some X3 profile curves for various X4, demonstrating different geometric types and maximal extension properties.
By concatenating graphical pieces of type 2 followed by type 3, and ensuring the final segment returns smoothly to the axis (providing a closed, smooth profile), a compact embedded mean-convex non-convex X5-hypersurface is produced.
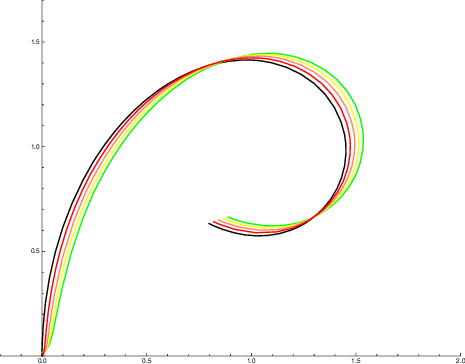
Figure 2: Graphs of X6 for X7 near zero, sweeping out non-convex classes as initial data is perturbed.
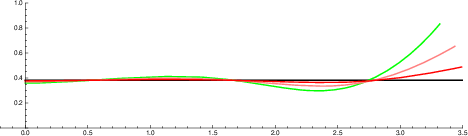
Figure 3: Graphs of X8 for X9 near the critical value ν0, indicating oscillatory and multi-segment configurations.
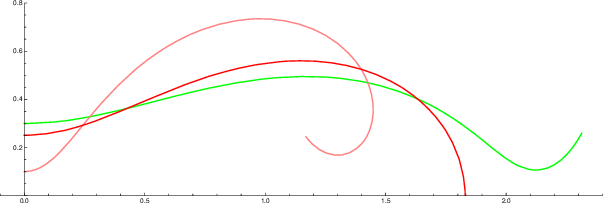
Figure 4: A profile curve that generates a mean convex ν1 ν2-hypersurface, as proven to exist by shooting arguments at the infimum parameter.
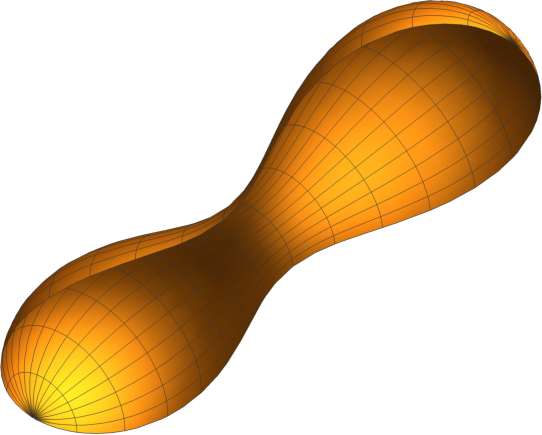
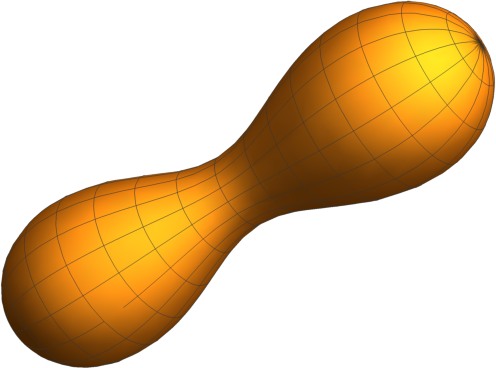
Figure 5: The resulting mean convex ν3-sphere in ν4 for ν5, depicted both as a profile and as a full surface of revolution.
Rigidity and Mean Convexity
A crucial geometric argument confirms that the constructed hypersurfaces are strictly mean convex but not convex. By considering the minimal mean curvature point and total principle curvature balance, one shows the strict positivity of the mean curvature ν6 everywhere, while at some locations the hypersurface bends non-convexly.
This reveals a clear dichotomy: while convexity is rigid for ν7 (imposing round spheres), mean convexity alone supports a much richer moduli of embedded, non-spherical hypersurfaces.
Implications and Future Directions
The explicit construction of compact mean convex (but non-convex) ν8-hypersurfaces diffeomorphic to spheres for ν9 demonstrates the intricate interplay between geometric flow equations, weighted isoperimetric variational problems, and the analytic structure of high-codimension ODEs. The existence of these non-spherical, mean convex solutions shows the sharpness of existing convexity rigidity theorems (e.g., the work of Heilman) and completes a missing piece in the landscape of λ0-hypersurface geometry.
This methodology—analytic reduction, local/global classification, and shooting for the desired profile—offers a general template for exploratory work in curvature flows, singularity models, and weighted geometric variational theory.
Practically, further development might involve higher-genus constructions, explicit metric and curvature quantification, and exploration of stability under perturbations and flows. Theoretically, these examples illustrate possible singularity models and transitions in mean curvature flows in weighted or Gaussian spaces, with potential applications in probability theory and PDE geometry.
Conclusion
This paper rigorously constructs compact, embedded, strictly mean convex and non-convex λ1-hypersurfaces for λ2, diffeomorphic to the sphere, but not isometric to the round sphere. It delineates the precise boundary of convexity rigidity and enriches the taxonomy of solutions to the weighted mean curvature equation. The interplay of analytic and geometric techniques in achieving this classification has broad implications for geometric analysis and the study of curvature flows.
(2603.29371)